TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025100353
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2024192706
出願日
2024-11-01
発明の名称
追跡を改善するための方法
出願人
アクシス アーベー
代理人
園田・小林弁理士法人
主分類
G06T
7/292 20170101AFI20250626BHJP(計算;計数)
要約
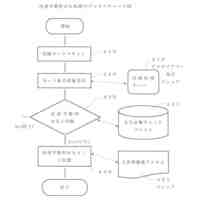
【課題】俯瞰モニタリングカメラを使用してシーン内のオブジェクトの追跡を改善する方法及びカメラシステムを提供する。
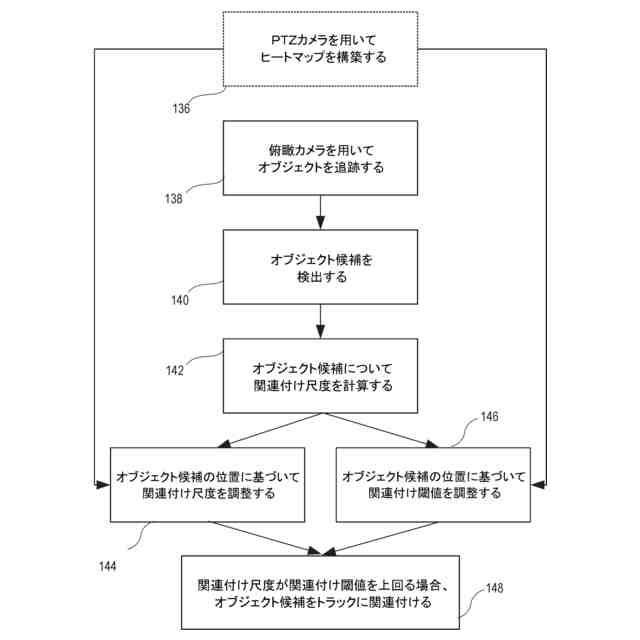
【解決手段】方法は、現在のオブジェクトトラックを生成するために、シーンを描写する複数の画像フレーム内のオブジェクトを追跡し、シーンを描写する複数の画像フレームに続く画像フレーム内のオブジェクト候補を検出し、各オブジェクト候補について、現在のオブジェクトトラックに関連付けられる尤度を示す関連付け尺度を計算し、俯瞰カメラのビューをシーンのヒートマップと相関させ、現在のオブジェクトトラックに関連付けられる確率を高めるように、ヒートマップに従って過去の検証されたオブジェクトトラックの発生の度合いが上昇したシーン内の領域に位置するオブジェクト候補についての関連付け尺度又は関連付け閾値を調整し、関連付け尺度が関連付け閾値を上回るとき各オブジェクト候補を現在のオブジェクトトラックに関連付ける。
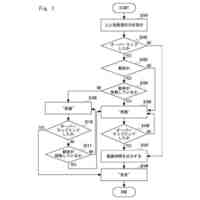
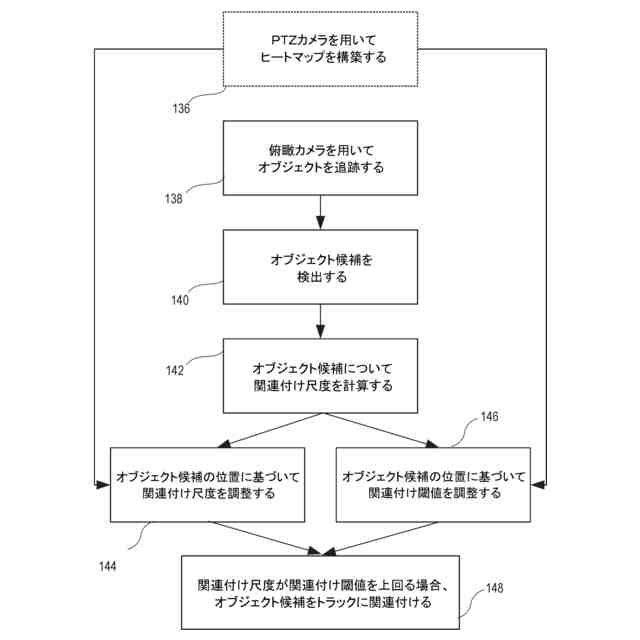
【選択図】図7
特許請求の範囲
【請求項1】
俯瞰モニタリングカメラを使用してシーン内のオブジェクトの追跡を改善するための方法であって、
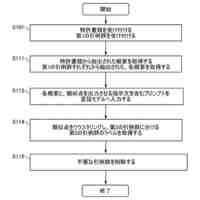
現在のオブジェクトトラックを生成するために、前記シーンを描写する複数の画像フレーム内のオブジェクトを追跡することと、
前記シーンを描写する前記複数の画像フレームに続く画像フレーム内のオブジェクト候補を検出することと、
各オブジェクト候補について、前記オブジェクト候補が現在のオブジェクトトラックに関連付けられる尤度を示す関連付け尺度を計算することと
を含み、
前記方法は、
俯瞰カメラのビューを前記シーンのヒートマップと相関させることであって、前記シーンの前記ヒートマップが、過去のオブジェクトトラックの発生の度合いが上昇した前記シーン内の領域を示すデータを提供する、相関させることと、
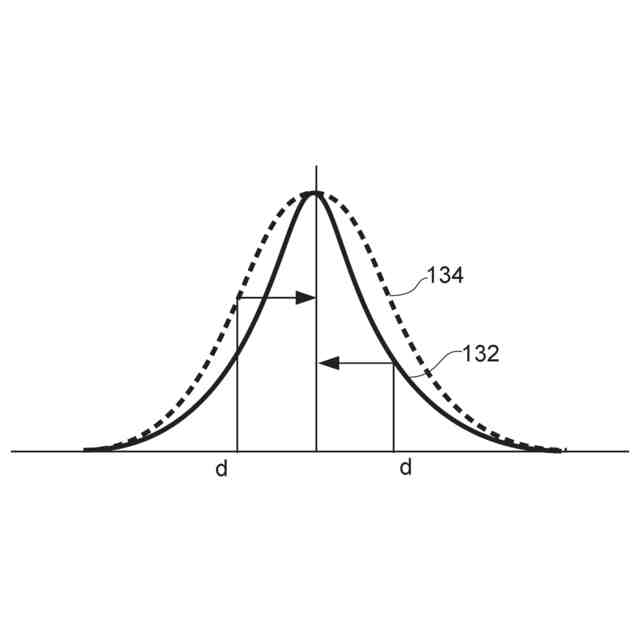
現在のオブジェクトトラックに関連付けられる確率を高めるように、前記ヒートマップに従って、過去のオブジェクトトラックの発生の度合いが上昇した前記シーン内の領域内に位置するオブジェクト候補についての前記関連付け尺度又は関連付け閾値を調整することと、
前記関連付け尺度が関連付け閾値を上回る場合、各オブジェクト候補を現在のオブジェクトトラックに関連付けることと
をさらに含む、方法。
続きを表示(約 920 文字)
【請求項2】
前記ヒートマップが、経時的に前記シーン内のオブジェクトを追跡し、前記オブジェクトが辿るトラックを記憶するPTZカメラを使用して生成される、請求項1に記載の方法。
【請求項3】
前記ヒートマップが、経時的に前記シーン内のオブジェクトを追跡するPTZカメラを使用して生成され、前記追跡が、追跡されている各個々のオブジェクトからの検証されたトラックを保証するために断続的又は連続的な再識別を使用して実行される、請求項1に記載の方法。
【請求項4】
前記ヒートマップが、記録されたオブジェクトトラックの位置測定値を含む、請求項1に記載の方法。
【請求項5】
前記ヒートマップが、記録されたオブジェクトトラックについての速度情報を含む、請求項1に記載の方法。
【請求項6】
前記ヒートマップが、オブジェクトクラス又はオブジェクトスピードに対するフィルタリングを可能にするために、記録されたオブジェクトトラックのオブジェクトクラス又はオブジェクトスピードを含む、請求項1に記載の方法。
【請求項7】
識別されたオブジェクトクラス又は識別されたオブジェクトスピードに対応するヒートマップデータを選択することをさらに含む、請求項6に記載の方法。
【請求項8】
現在のオブジェクトの追跡が、追跡された前記オブジェクトが属するオブジェクトクラス、又は前記オブジェクトのオブジェクトスピードを特定することを含む、請求項7に記載の方法。
【請求項9】
PTZカメラと俯瞰カメラとを備えるシステムによって実行され、俯瞰カメラのビューが、前記PTZカメラのビューで位置較正される、請求項1に記載の方法。
【請求項10】
前記ヒートマップの組み立て中に、追跡がまた前記俯瞰カメラからの画像データを使用して実行され、前記俯瞰カメラによって実行された前記追跡のための関連付け尺度が、前記PTZカメラによって検証されたトラックについてモニタリングされる、請求項2に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、追跡を改善するための方法、及び前記方法を実行するように構成されたカメラシステムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
追跡の機能性は、ビデオ監視アプリケーションにおける標準的な機能である。これは、監視されているシーン内のオブジェクトを追跡するという明白なタスクのために使用されるが、そのようなシーンにおける人物計数及びライン横断検出などの機能に対してロバスト性を提供するための手段としても使用される。その結果、追跡方法の品質は、監視システムのいくつかの機能性に影響を及ぼす。
【0003】
オブジェクトの追跡は、オブジェクトのいくつかの検出を単一のオブジェクトトラックに相関させることを含む。これは、一般に、現在追跡されているオブジェクトが、その現在の動きに基づいて、次にどこで観測されるかを予測することによって実行される。次の検出が予測に十分に近い場合、それは同じオブジェクトに関係すると考えられる。実際の方法はこれよりもわずかに複雑であり、その一部は詳細な説明で詳述されるが、基本的な方法論は従来技術に含まれる。例えば、別のオブジェクトによる遮蔽、又は他のオブジェクトとの混同などのために、トラックが失われる場合がある。
【0004】
オブジェクト特徴を抽出する可能性の登場、すなわち、オブジェクトの識別特徴を介してオブジェクトのアイデンティティを定義することが可能であるので、適切な状況下では、再識別を使用することによって壊れたトラックを修正することが可能である。これは、基本的に、オブジェクトアイデンティティの自動検証を実行し、2つのトラックレットが同じオブジェクトに関連する場合、それらを単一のトラックに再接続することに対応する。再識別は、信頼性のある適切な画質を必要とするため、適切なピクセル密度を達成するために、より良好な分解能、及び/又はオブジェクトにズームインする能力を有するカメラシステムでより一般的に使用される。
【0005】
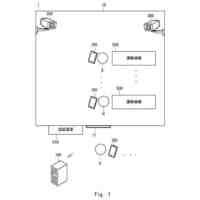
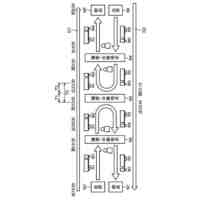
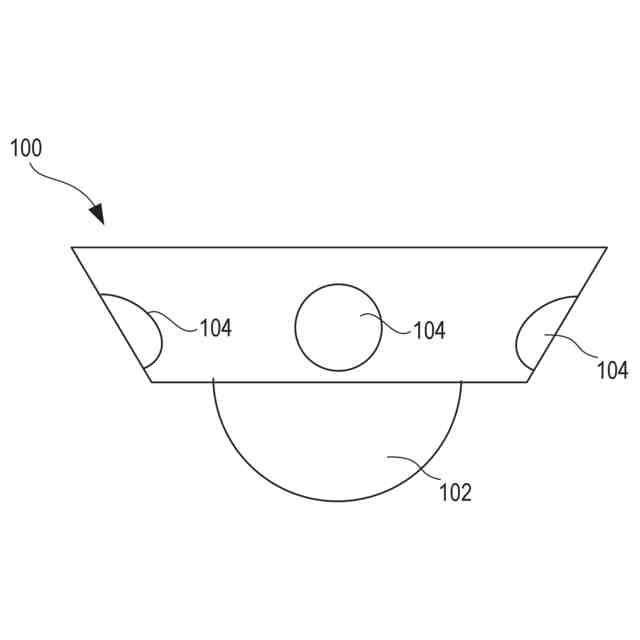
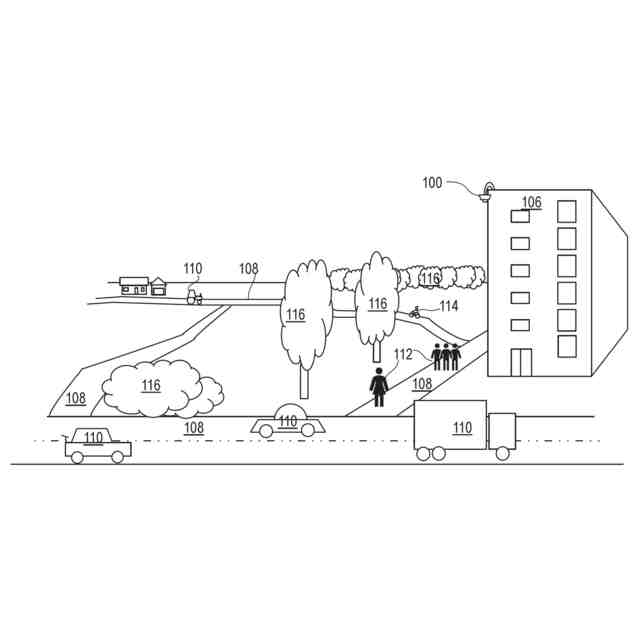
後者のタイプのカメラシステムは、特に、追跡されるオブジェクトを視野内に維持するためにパン及びチルトも可能である場合、オブジェクトを追跡することに関してかなりの利点を有する。しかしながら、関連する欠点は、1つのオブジェクトが追跡されている間、シーンの残りが監視カバレッジなしであり得ることである。そのため、連続的なシーンの俯瞰と、個々のオブジェクト又は場所にズームインする能力の両方を提供することを目的としたカメラシステムは、詳細なビューを可能にするために、広い視野を有する1つ又は複数の俯瞰カメラと、1つ又は複数のPTZカメラ(パン・チルト・ズームカメラ)の両方を備え得る。簡単に述べると、俯瞰カメラはPTZカメラよりも高いピクセル密度を有することが非常によくあるが、PTZカメラは、ズームインする能力のためにオブジェクトのより高いピクセル密度を有する画像を取得することが可能である。
【0006】
その結果、追跡、特に俯瞰カメラを使用する追跡のための改善された方法及び構成が必要とされている。「俯瞰カメラ」という用語は、特定のカメラ設定におけるその制限によって定義され得る。これは、特定のシーンについて又は特定のシーンの一部分について、再識別を実行するのに十分な品質の画像を取得することができないカメラに関する。典型的な例は、カメラが十分なピクセル密度を有する画像を抽出するにはオブジェクトが遠すぎることである。これは、画質が追跡性能に制限を加え得る追跡と言い換えることができ、これは、ある時点でのいずれのカメラにも当てはまる。カメラの実装形態では、俯瞰カメラは、典型的には、シーンの俯瞰及び状況認識を提供することを目的とした、広い視野を有する固定カメラ(固定された向き及び固定ズーム又はズームなし)に対応する。いくつかの俯瞰カメラを組み合わせて使用して、さらに大きな視野をカバーすることができ、1つ又は複数のPTZカメラを配置して、監視されるシーンの一部分の詳細なビューを提供することができる。
【発明の概要】
【0007】
本発明の目的は、特に再識別の利用が可能でない状況において、シーン内のオブジェクトを追跡するための改善された方法を提供することである。第1の態様によれば、これら及び他の目的は、完全に又は少なくとも部分的に、請求項1に記載の方法によって達成される。別の目的は、以下の詳細な説明のように、後続の独立請求項及びその従属請求項に詳述されているような方法を実行するように構成されたカメラシステムを提供することである。
【0008】
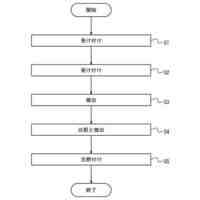
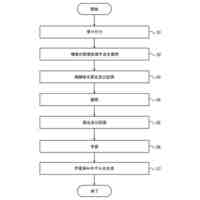
本発明の利点は、そのいくつかの実施形態によれば、特に、現在の追跡アルゴリズムがある位置から別の位置へ追跡されるオブジェクトに追従することが困難である追跡状況において、追跡を改善することを含む。請求項1によれば、これは、俯瞰モニタリングカメラを使用してシーン内のオブジェクトの追跡を改善するための方法によって達成される。本方法は、現在のオブジェクトトラックを生成するために、シーンを描写する複数の画像フレーム内のオブジェクトを追跡することを含む。追跡の一部は、シーンを描写する複数の画像フレームに続く画像フレーム内のオブジェクト候補を検出することであり、これらのオブジェクト候補のうちのどれが現在のトラックに属するかを見出すことを目的とする。そのために、各オブジェクト候補について関連付け尺度が計算され、その関連付け尺度は、オブジェクト候補が現在のオブジェクトトラックに関連付けられる尤度を示す。画像データの品質が低品質のものであるか、又は他の原因が追跡に不確実性を導入する状況下では、それは、俯瞰カメラのビューをシーンのヒートマップと相関させることであって、シーンのヒートマップが、過去のオブジェクトトラックの発生の度合いが上昇したシーン内の領域を示すデータを提供する、相関させることと、現在のオブジェクトトラックに関連付けられる確率を高めるように、ヒートマップに従って過去のオブジェクトトラックの発生の度合いが上昇したシーン内の領域に位置するオブジェクト候補についての関連付け尺度又は関連付け閾値を調整することとを含む、さらなるステップの導入によって強化することができる。これらのステップが行われると、追跡アルゴリズムは、関連付け尺度が関連付け閾値を上回る場合、各オブジェクト候補を現在のオブジェクトトラックに関連付けるステップに進むことができる。このようにして、常套の経路に沿ったオブジェクト候補は、現在のトラックに関連付けられる尤度がより高くなる。
【0009】
俯瞰カメラのビューはヒートマップと相関しており、すなわち、俯瞰カメラ内の位置をヒートマップ内の位置に変換することができるので、ヒートマップから値を抽出し、それらを俯瞰カメラのビュー内の適切な位置に適用することが容易に可能である。
【0010】
ヒートマップは、好ましくは、経時的にシーン内のオブジェクトを追跡し、オブジェクトが辿るトラックを記憶するPTZカメラを使用して生成され得る。PTZカメラを使用することにより、監視されたシーンに対して改善された追跡性能が可能になり、これにより過去のトラックの高品質データの量が増加する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
22日前
個人
情報処理装置
22日前
個人
記入設定プラグイン
10日前
個人
情報処理装置
18日前
個人
不動産売買システム
2日前
個人
情報入力装置
22日前
個人
物価スライド機能付生命保険
22日前
個人
マイホーム非電子入札システム
22日前
株式会社BONNOU
管理装置
15日前
株式会社東芝
電子機器
3日前
サクサ株式会社
カードの制動構造
24日前
株式会社ワコム
電子消去具
2日前
個人
決済手数料0%のクレジットカード
25日前
ホシデン株式会社
タッチ入力装置
2日前
株式会社ライト
情報処理装置
15日前
村田機械株式会社
割当補助システム
28日前
個人
パターン抽出方法及び通信多重化方法
1日前
住友重機械工業株式会社
力覚伝達装置
17日前
株式会社CBE-A
情報処理システム
1日前
大王製紙株式会社
RFIDタグ
1日前
シャープ株式会社
通信装置
22日前
株式会社豆蔵
ピッキング装置
24日前
個人
システム、データおよびプログラム
11日前
株式会社WellGo
個人情報秘匿方法
18日前
株式会社半導体エネルギー研究所
検索支援方法
15日前
株式会社半導体エネルギー研究所
会計システム
8日前
株式会社mov
情報処理システム
22日前
株式会社WellGo
個人情報利用方法
18日前
トヨタ自動車株式会社
データ収集システム
16日前
トヨタ自動車株式会社
リスク評価システム
28日前
個人
輸送管理装置及び輸送管理方法
22日前
株式会社WellGo
ストレージサービス
18日前
株式会社Rist
情報処理方法
23日前
株式会社Rist
情報処理方法
23日前
キヤノン株式会社
印刷システム
1日前
日本電気株式会社
回路装置及び制御方法
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ