TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105197
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223576
出願日
2023-12-28
発明の名称
入出力予測方法、制御器の設計方法及び制御方法
出願人
国立大学法人広島大学
代理人
個人
主分類
G05B
13/02 20060101AFI20250703BHJP(制御;調整)
要約
【課題】制御対象がシステム変動した場合であっても、入出力データを予測できるデータ予測方法及び予測データを用いた制御方法を提供する。
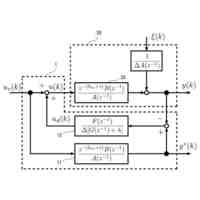
【解決手段】本発明に係る入出力予測方法では、経時的な特性変化であるシステム変動を有する制御対象と、制御器の制御パラメータを所定の初期パラメータと設定した場合の目標値である初期目標値、制御入力である初期入力及び制御対象の出力である初期出力と、に基づいて、FRITの疑似参照入力を生成する。また、疑似参照入力を用いて、FIRフィルタを生成し、FIRフィルタを用いて、制御器の制御パラメータを初期パラメータと異なることとした場合の入出力を予測する。
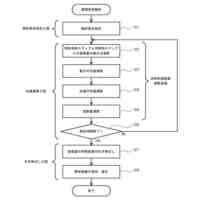
【選択図】図4
特許請求の範囲
【請求項1】
以下の式で表される経時的な特性変化であるシステム変動を有する制御対象と、
JPEG
2025105197000045.jpg
23
170
制御器の制御パラメータを所定の初期パラメータと設定した場合の目標値である初期目標値、制御入力である初期入力及び制御対象の出力である初期出力と、に基づいて、以下の式に示すFRITの疑似参照入力を生成し、
JPEG
2025105197000046.jpg
33
170
前記疑似参照入力を用いて、以下の式を満たすFIRフィルタを生成し、
JPEG
2025105197000047.jpg
103
170
前記FIRフィルタを用いて、以下の式により、前記制御器の前記制御パラメータを前記初期パラメータと異なることとした場合の入出力を予測する、
JPEG
2025105197000048.jpg
26
170
ことを特徴とする入出力予測方法。
続きを表示(約 960 文字)
【請求項2】
前記制御器は、以下の式で表される参照軌道を実現し、
JPEG
2025105197000049.jpg
18
170
以下の式で表されるFIR型であり、
JPEG
2025105197000050.jpg
11
170
以下の式で表される評価規範を最小化するFRIT法によって調整され、
JPEG
2025105197000051.jpg
127
170
前記疑似参照入力を、以下の式に置き換えて、
JPEG
2025105197000052.jpg
16
170
前記制御器の前記制御パラメータを前記初期パラメータと異なることとした場合の入出力を予測する、
ことを特徴とする請求項1に記載の入出力予測方法。
【請求項3】
請求項2のデータ予測方法によって予測される予測入出力と、以下の式で表される予測偏差とを用いて、
JPEG
2025105197000053.jpg
15
170
以下の式で表されるPIDゲインを、
JPEG
2025105197000054.jpg
29
170
以下の式で表される評価規範を最小化するように最適化し、
JPEG
2025105197000055.jpg
26
170
最適化されたPIDゲインを前記制御器のPIDゲインとする、
ことを特徴とする制御器の設計方法。
【請求項4】
請求項3の設計方法によって最適化されたPIDゲインと、前記最適化されたPIDゲインに対応する予測入力及び予測出力と、目標値との組み合わせを含む情報ベクトルを、データベースに記憶させ、
前記データベースに記憶された情報ベクトルと、システムの現在の状態を表す要求点とに基づいて、更新する制御パラメータを算出し、
算出された制御パラメータに基づいて、制御対象をデータベース駆動型制御によって制御する、
ことを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、入出力予測方法、制御器の設計方法及び制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、システムの構造やパラメータが十分に把握されていないシステムに対して、モデリングを介さずに、操業データから直接制御パラメータを算出するデータ駆動型制御系設計法が提案されている。
【0003】
データベース駆動型制御法は、データベースに格納されているデータを参照してPIDゲイン等の制御器のパラメータを調整する手法である。したがって、より多くの操業データをデータベースに格納できれば更なる制御性能の向上が期待できる。データベースに格納するための、制御システムの入出力データの予測方法として、ERIT(Estimated Response Iterative Tuning)法を用いる方法(非特許文献1)、重ね合わせの原理に基づく方法(非特許文献2)等が提案されている。
【先行技術文献】
【非特許文献】
【0004】
金子修,中村岳男,池崎太一、「二自由度制御系におけるフィードフォワード制御器更新の新しいアプローチ -Estimated Response Iterative Tuning (ERIT) の提案-」、計測自動制御学会論文集、Vol.54,No.12,p.857-864、2018年
酒徳大雅 他、「入出力データを用いた閉ループ応答の推定」、電気学会論文誌C、Vol.141,No.3,p.396-397、2021年
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ERIT法は制御器を変更した場合の予測を行うものであるので、経時的に制御対象が状態変動する場合の応答を予測することができない。また、重ね合わせの原理は、線形時不変の制御システムを想定したものであるので、時変系の制御システムに単純に適用することは難しい。
【0006】
本発明は、上述の事情に鑑みてなされたものであり、制御対象がシステム変動した場合であっても、入出力応答を予測できる入出力予測方法、制御器の設計方法及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
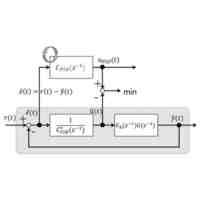
上記目的を達成するために、この発明の第1の観点に係る入出力予測方法では、
以下の式で表される経時的な特性変化であるシステム変動を有する制御対象と、
JPEG
2025105197000002.jpg
23
170
制御器の制御パラメータを所定の初期パラメータと設定した場合の目標値である初期目標値、制御入力である初期入力及び制御対象の出力である初期出力と、に基づいて、以下の式に示すFRITの疑似参照入力を生成し、
JPEG
2025105197000003.jpg
33
170
前記疑似参照入力を用いて、以下の式を満たすFIRフィルタを生成し、
JPEG
2025105197000004.jpg
103
170
前記FIRフィルタを用いて、以下の式により、前記制御器の前記制御パラメータを前記初期パラメータと異なることとした場合の入出力を予測する。
JPEG
2025105197000005.jpg
26
170
【0008】
また、前記制御器は、以下の式で表される参照軌道を実現し、
JPEG
2025105197000006.jpg
18
170
以下の式で表されるFIR型であり、
JPEG
2025105197000007.jpg
11
170
以下の式で表される評価規範を最小化するFRIT法によって調整され、
JPEG
2025105197000008.jpg
127
170
前記疑似参照入力を、以下の式に置き換えて、
JPEG
2025105197000009.jpg
16
170
前記制御器の前記制御パラメータを前記初期パラメータと異なることとした場合の入出力を予測する、
こととしてもよい。
【0009】
この発明の第2の観点に係る制御器の設計方法では、
第1の観点に係るデータ予測方法によって予測される予測入出力と、以下の式で表される予測偏差とを用いて、
JPEG
2025105197000010.jpg
15
170
以下の式で表されるPIDゲインを、
JPEG
2025105197000011.jpg
29
170
以下の式で表される評価規範を最小化するように最適化し、
JPEG
2025105197000012.jpg
26
170
最適化されたPIDゲインを前記制御器のPIDゲインとする。
【0010】
この発明の第3の観点に係る制御方法では、
第2の観点に係る設計方法によって最適化されたPIDゲインと、前記最適化されたPIDゲインに対応する予測入力及び予測出力と、目標値との組み合わせを含む情報ベクトルを、データベースに記憶させ、
前記データベースに記憶された情報ベクトルと、システムの現在の状態を表す要求点とに基づいて、更新する制御パラメータを算出し、
算出された制御パラメータに基づいて、制御対象をデータベース駆動型制御によって制御する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人広島大学
腸内菌叢改善剤
5か月前
国立大学法人広島大学
直腸生検補助具
2か月前
国立大学法人広島大学
水素の製造方法
4か月前
国立大学法人広島大学
モデル誤差抑制補償器
7か月前
国立大学法人広島大学
ゴム組成物の製造方法
3か月前
国立大学法人広島大学
作業機械の油圧制御装置
3日前
国立大学法人広島大学
肺高血圧症の治療用組成物
3か月前
株式会社明治
分析システム
4か月前
国立大学法人広島大学
二酸化炭素吸着材の製造方法
8日前
株式会社大林組
土壌改良方法
2か月前
国立大学法人広島大学
嚥下能力評価装置及びプログラム
6か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
5か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
5か月前
国立大学法人広島大学
難水溶性化合物の細胞外小胞搭載方法
5か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
5か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
5か月前
株式会社大林組
CO2固定量測定方法
1か月前
国立大学法人広島大学
生体情報測定器及び生体情報の測定方法
6か月前
国立大学法人広島大学
枯草菌並びにそれを含む食品および発酵物
3か月前
三菱ケミカル株式会社
アミンの検出方法
6か月前
国立大学法人秋田大学
癌細胞増殖抑制剤
23日前
国立大学法人広島大学
画像解析装置、画像解析方法及びプログラム
7か月前
株式会社大林組
セメント組成物の製造方法
1か月前
株式会社大林組
セメント組成物の製造方法
4か月前
国立大学法人広島大学
流体解析方法、流体解析装置及びプログラム
5か月前
アース製薬株式会社
口内炎発症抑制組成物
7か月前
国立大学法人広島大学
心理特性推定システムおよび作業管理システム
3日前
三建産業株式会社
工業炉
3か月前
JFEスチール株式会社
情報処理装置及び方法
22日前
フジクリーン工業株式会社
発泡ガラス複合材料
5か月前
国立大学法人広島大学
尿管ステント抜去器具及び尿管ステント抜去方法
5か月前
大陽日酸株式会社
膜分離装置および膜分離方法
6か月前
国立大学法人広島大学
入出力予測方法、制御器の設計方法及び制御方法
3か月前
国立大学法人広島大学
植物生育環境評価装置及び植物生育環境評価方法
4か月前
国立大学法人広島大学
二酸化炭素分離膜の製造方法及び二酸化炭素分離膜
3か月前
トヨタ自動車株式会社
油膜付燃料及び非混和性油脂
4か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ