TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109090
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024002800
出願日
2024-01-11
発明の名称
衝突回避システム、衝突回避方法及び衝突回避プログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G08G
3/02 20060101AFI20250716BHJP(信号)
要約
【課題】相手船等の障害物に対して、違和感を与えることなく、適切に衝突回避行動を実行する。
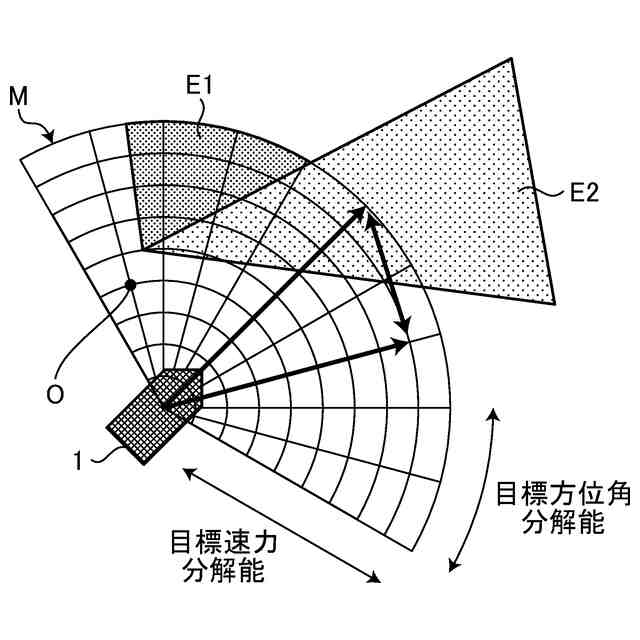
【解決手段】船舶の位置と障害物の位置とに基づいて、船舶の衝突回避行動を実行させる制御部を備える衝突回避システムにおいて、制御部は、複数の格子点を結んだ格子状のグリッドマップを生成し、格子点に、回避方位と回避速力とを設定し、グリッドマップ上に設定された法規違反範囲と衝突範囲とを含まない範囲である、航行可能範囲の格子点に対して、評価関数に基づく評価点を算出し、評価関数は、船舶の目標航路からの乖離を評価する航路評価パラメータと、障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、評価点は、点数が低いほど、目標航路からの乖離が小さく、衝突の危険度が低くなっており、制御部は、評価点が最小値となる格子点に設定された回避方位と回避速力となるように衝突回避行動を実行する。
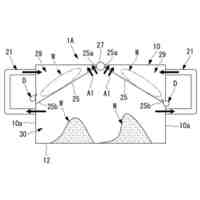
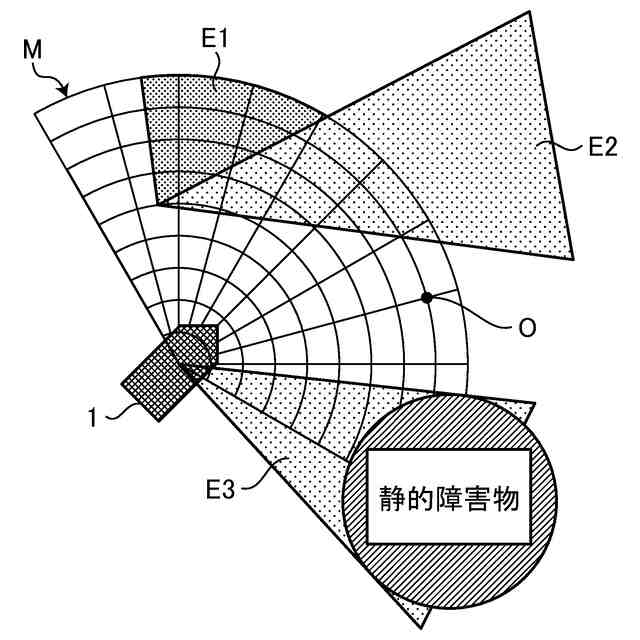
【選択図】図2
特許請求の範囲
【請求項1】
船舶の障害物への衝突を回避する衝突回避システムにおいて、
前記船舶の位置を取得する第1の位置取得部と、
前記障害物の位置を取得する第2の位置取得部と、
前記第1の位置取得部で取得した前記船舶の位置と、前記第2の位置取得部で取得した前記障害物の位置とに基づいて、前記船舶の衝突回避行動を実行させる制御部と、を備え、
前記制御部は、
前記船舶の位置を含むと共に、複数の格子点を結んだ格子状のグリッドマップを生成し、
前記格子点に、回避方位と回避速力とを設定し、
海上の交通法規において違反となる法規違反範囲を、前記グリッドマップ上に設定し、
前記障害物に有限時間で衝突する衝突範囲を、前記グリッドマップ上に設定し、
前記法規違反範囲と前記衝突範囲とを含まない範囲である、前記グリッドマップ上の航行可能範囲の前記格子点に対して、評価関数に基づく評価点を算出し、
前記評価点に基づいて前記船舶の前記衝突回避行動を実行しており、
前記評価関数は、予め設定された前記船舶の航路からの乖離を評価する航路評価パラメータと、前記障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、
前記航路評価パラメータに基づく前記評価点は、点数が低いほど、前記船舶の航路からの乖離が小さく、
前記官能評価パラメータに基づく前記評価点は、点数が低いほど、衝突の危険度が低くなっており、
前記制御部は、
前記評価点が最小値となる前記格子点に設定された前記回避方位と前記回避速力となるように前記衝突回避行動を実行する衝突回避システム。
続きを表示(約 2,000 文字)
【請求項2】
前記制御部は、
前記評価関数によって算出された最小値となる評価点が複数存在する場合、前記航路評価パラメータに基づく前記評価点の点数が低いほうの前記格子点を選択する請求項1に記載の衝突回避システム。
【請求項3】
前記障害物は、移動する動的障害物であり、
前記第2の位置取得部は、前記動的障害物を識別して、前記動的障害物の位置を取得する障害物識別装置である請求項1に記載の衝突回避システム。
【請求項4】
前記障害物は、不動の静的障害物であり、
前記第2の位置取得部は、前記静的障害物の位置を含む海図を取得する請求項1に記載の衝突回避システム。
【請求項5】
前記制御部は、
前記障害物と前記船舶との位置関係が、前記船舶が前記障害物を追い越した位置関係であると判定すると、前記船舶の衝突回避行動の実行を終了する請求項1に記載の衝突回避システム。
【請求項6】
前記制御部は、
前記格子点に設定される前記回避方位及び前記回避速力に応じて、前記グリッドマップのグリッド幅を変化させる請求項1に記載の衝突回避システム。
【請求項7】
船舶の障害物への衝突を回避する衝突回避システムが実行する衝突回避方法において、
前記衝突回避システムは、
前記船舶の位置を取得する第1の位置取得部と、
前記障害物の位置を取得する第2の位置取得部と、
前記第1の位置取得部で取得した前記船舶の位置と、前記第2の位置取得部で取得した前記障害物の位置とに基づいて、前記船舶の衝突回避行動を実行させる制御部と、を備え、
前記制御部が、
前記船舶の位置を含むと共に、複数の格子点を結んだ格子状のグリッドマップを生成し、
前記格子点に、回避方位と回避速力とを設定し、
海上の交通法規において違反となる法規違反範囲を、前記グリッドマップ上に設定し、
前記障害物に有限時間で衝突する衝突範囲を、前記グリッドマップ上に設定し、
前記法規違反範囲と前記衝突範囲とを含まない範囲である、前記グリッドマップ上の航行可能範囲の前記格子点に対して、評価関数に基づく評価点を算出し、
前記評価点に基づいて前記船舶の前記衝突回避行動を実行しており、
前記評価関数は、予め設定された前記船舶の航路からの乖離を評価する航路評価パラメータと、前記障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、
前記航路評価パラメータに基づく前記評価点は、点数が低いほど、前記船舶の航路からの乖離が小さく、
前記官能評価パラメータに基づく前記評価点は、点数が低いほど、衝突の危険度が低くなっており、
前記制御部が、
前記評価点が最小値となる前記格子点に設定された前記回避方位と前記回避速力となるように前記衝突回避行動を実行する衝突回避方法。
【請求項8】
船舶の障害物への衝突を回避する衝突回避システムにより実行される衝突回避プログラムにおいて、
前記衝突回避システムは、
前記船舶の位置を取得する第1の位置取得部と、
前記障害物の位置を取得する第2の位置取得部と、
前記第1の位置取得部で取得した前記船舶の位置と、前記第2の位置取得部で取得した前記障害物の位置とに基づいて、前記船舶の衝突回避行動を実行させる制御部と、を備え、
前記制御部に、
前記船舶の位置を含むと共に、複数の格子点を結んだ格子状のグリッドマップを生成し、
前記格子点に、回避方位と回避速力とを設定し、
海上の交通法規において違反となる法規違反範囲を、前記グリッドマップ上に設定し、
前記障害物に有限時間で衝突する衝突範囲を、前記グリッドマップ上に設定し、
前記法規違反範囲と前記衝突範囲とを含まない範囲である、前記グリッドマップ上の航行可能範囲の前記格子点に対して、評価関数に基づく評価点を算出し、
前記評価点に基づいて前記船舶の前記衝突回避行動を実行させ、
前記評価関数は、予め設定された前記船舶の航路からの乖離を評価する航路評価パラメータと、前記障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、
前記航路評価パラメータに基づく前記評価点は、点数が低いほど、前記船舶の航路からの乖離が小さく、
前記官能評価パラメータに基づく前記評価点は、点数が低いほど、衝突の危険度が低くなっており、
前記制御部に、
前記評価点が最小値となる前記格子点に設定された前記回避方位と前記回避速力となるように前記衝突回避行動を実行させる衝突回避プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、船舶の障害物への衝突を回避する衝突回避システム、衝突回避方法及び衝突回避プログラムに関するものである。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、自船と相手船との衝突を予防する船舶の衝突予防方法が知られている(例えば、特許文献1参照)。この衝突予防方法では、相手船の将来動向を予測し、自船と相手船との衝突危険範囲を演算して表示している。
【先行技術文献】
【特許文献】
【0003】
特開昭62-25278号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の衝突予防方法では、衝突危険範囲を避けるように自船が衝突回避行動を実行する。ここで、自船が自動の無人船舶である場合、相手船から見た自船の衝突回避行動が、相手船にとって不自然な衝突回避行動となる場合があり、相手船に対して違和感を与えてしまうことがある。
【0005】
そこで、本開示は、相手船等の障害物に対して、違和感を与えることなく、適切に衝突回避行動を実行することができる衝突回避システム、衝突回避方法及び衝突回避プログラムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本開示の衝突回避システムは、船舶の障害物への衝突を回避する衝突回避システムにおいて、前記船舶の位置を取得する第1の位置取得部と、前記障害物の位置を取得する第2の位置取得部と、前記第1の位置取得部で取得した前記船舶の位置と、前記第2の位置取得部で取得した前記障害物の位置とに基づいて、前記船舶の衝突回避行動を実行させる制御部と、を備え、前記制御部は、前記船舶の位置を含むと共に、複数の格子点を結んだ格子状のグリッドマップを生成し、前記格子点に、回避方位と回避速力とを設定し、海上の交通法規において違反となる法規違反範囲を、前記グリッドマップ上に設定し、前記障害物に有限時間で衝突する衝突範囲を、前記グリッドマップ上に設定し、前記法規違反範囲と前記衝突範囲とを含まない範囲である、前記グリッドマップ上の航行可能範囲の前記格子点に対して、評価関数に基づく評価点を算出し、前記評価点に基づいて前記船舶の前記衝突回避行動を実行しており、前記評価関数は、予め設定された前記船舶の航路からの乖離を評価する航路評価パラメータと、前記障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、前記航路評価パラメータに基づく前記評価点は、点数が低いほど、前記船舶の航路からの乖離が小さく、前記官能評価パラメータに基づく前記評価点は、点数が低いほど、衝突の危険度が低くなっており、前記制御部は、前記評価点が最小値となる前記格子点に設定された前記回避方位と前記回避速力となるように前記衝突回避行動を実行する。
【0007】
本開示の衝突回避方法は、船舶の障害物への衝突を回避する衝突回避システムが実行する衝突回避方法において、前記衝突回避システムは、前記船舶の位置を取得する第1の位置取得部と、前記障害物の位置を取得する第2の位置取得部と、前記第1の位置取得部で取得した前記船舶の位置と、前記第2の位置取得部で取得した前記障害物の位置とに基づいて、前記船舶の衝突回避行動を実行させる制御部と、を備え、前記制御部が、前記船舶の位置を含むと共に、複数の格子点を結んだ格子状のグリッドマップを生成し、前記格子点に、回避方位と回避速力とを設定し、海上の交通法規において違反となる法規違反範囲を、前記グリッドマップ上に設定し、前記障害物に有限時間で衝突する衝突範囲を、前記グリッドマップ上に設定し、前記法規違反範囲と前記衝突範囲とを含まない範囲である、前記グリッドマップ上の航行可能範囲の前記格子点に対して、評価関数に基づく評価点を算出し、前記評価点に基づいて前記船舶の前記衝突回避行動を実行しており、前記評価関数は、予め設定された前記船舶の航路からの乖離を評価する航路評価パラメータと、前記障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、前記航路評価パラメータに基づく前記評価点は、点数が低いほど、前記船舶の航路からの乖離が小さく、前記官能評価パラメータに基づく前記評価点は、点数が低いほど、衝突の危険度が低くなっており、前記制御部が、前記評価点が最小値となる前記格子点に設定された前記回避方位と前記回避速力となるように前記衝突回避行動を実行する。
【0008】
本開示の衝突回避プログラムは、船舶の障害物への衝突を回避する衝突回避システムにより実行される衝突回避プログラムにおいて、前記衝突回避システムは、前記船舶の位置を取得する第1の位置取得部と、前記障害物の位置を取得する第2の位置取得部と、前記第1の位置取得部で取得した前記船舶の位置と、前記第2の位置取得部で取得した前記障害物の位置とに基づいて、前記船舶の衝突回避行動を実行させる制御部と、を備え、前記制御部に、前記船舶の位置を含むと共に、複数の格子点を結んだ格子状のグリッドマップを生成し、前記格子点に、回避方位と回避速力とを設定し、海上の交通法規において違反となる法規違反範囲を、前記グリッドマップ上に設定し、前記障害物に有限時間で衝突する衝突範囲を、前記グリッドマップ上に設定し、前記法規違反範囲と前記衝突範囲とを含まない範囲である、前記グリッドマップ上の航行可能範囲の前記格子点に対して、評価関数に基づく評価点を算出し、前記評価点に基づいて前記船舶の前記衝突回避行動を実行させ、前記評価関数は、予め設定された前記船舶の航路からの乖離を評価する航路評価パラメータと、前記障害物に最接近するまでの衝突の危険度を官能評価する官能評価パラメータと、を含み、前記航路評価パラメータに基づく前記評価点は、点数が低いほど、前記船舶の航路からの乖離が小さく、前記官能評価パラメータに基づく前記評価点は、点数が低いほど、衝突の危険度が低くなっており、前記制御部に、前記評価点が最小値となる前記格子点に設定された前記回避方位と前記回避速力となるように前記衝突回避行動を実行させる。
【発明の効果】
【0009】
本開示によれば、相手船等の障害物に対して、違和感を与えることなく、適切に衝突回避行動を実行することができる。
【図面の簡単な説明】
【0010】
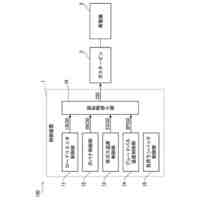
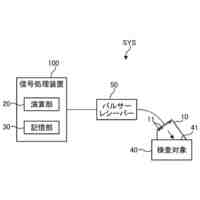
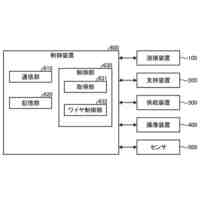
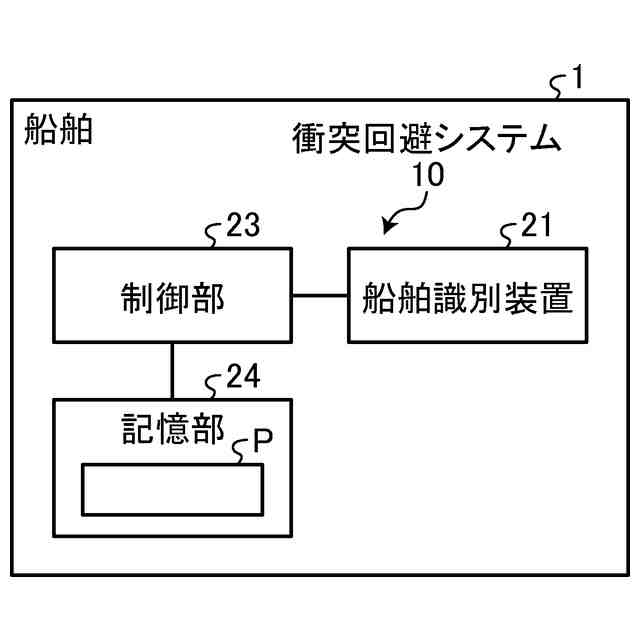
図1は、第一実施形態に係る船舶の衝突回避システムの概略構成図である。
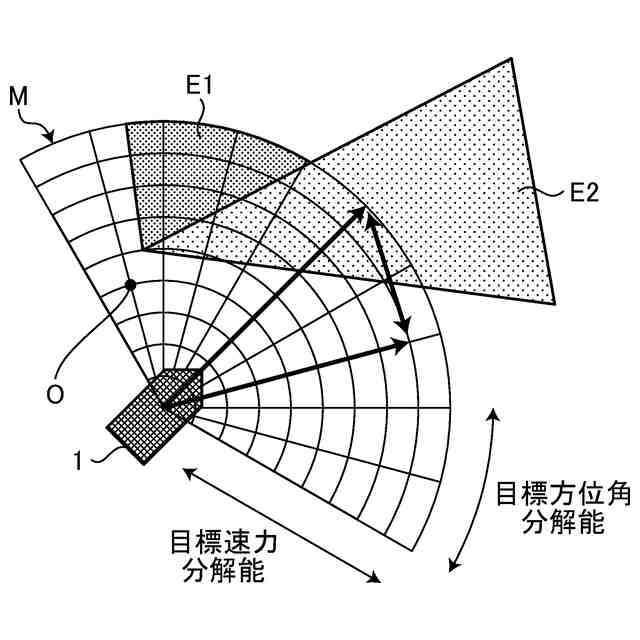
図2は、グリッドマップの説明図である。
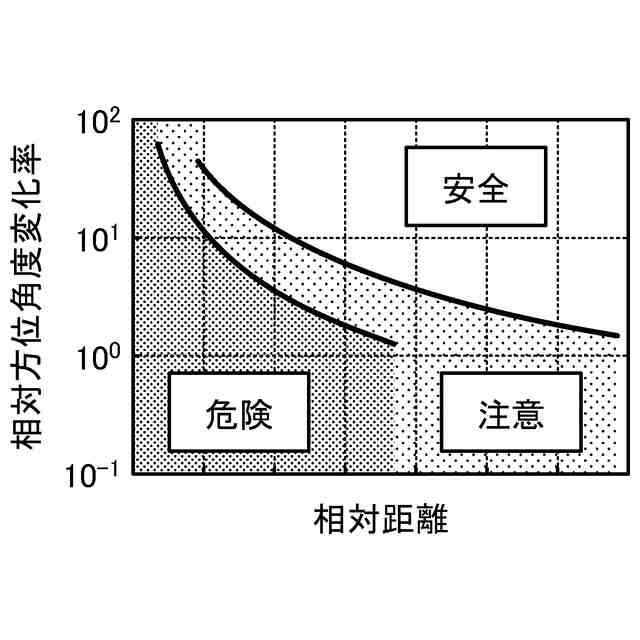
図3は、官能評価パラメータに関するグラフである。
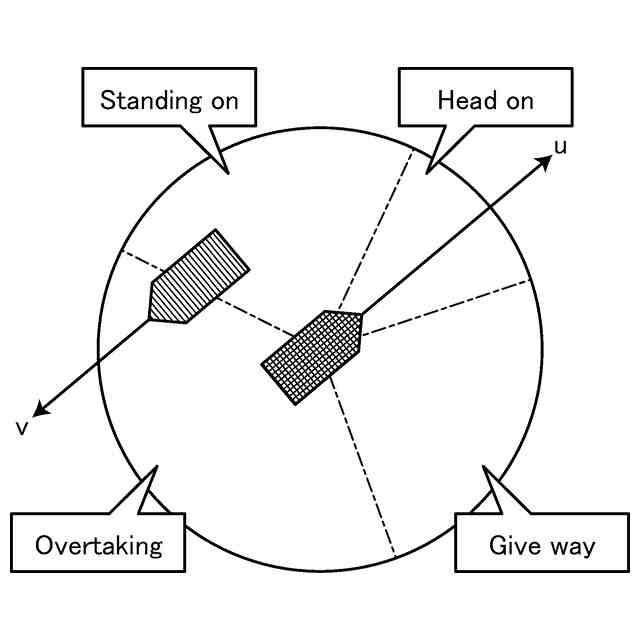
図4は、衝突回避行動の解除に関する説明図である。
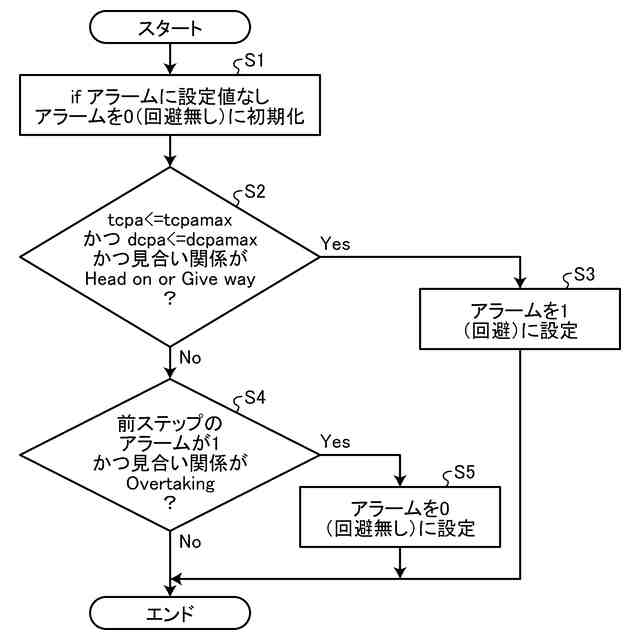
図5は、第一実施形態に係る衝突回避方法の一例を示すフローチャートである。
図6は、第二実施形態に係る船舶の衝突回避システムのグリッドマップの説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
炭化炉
1か月前
三菱重工業株式会社
炭化炉
2日前
三菱重工業株式会社
炭化炉
1か月前
三菱重工業株式会社
炉設備
10日前
三菱重工業株式会社
電子デバイス
1か月前
三菱重工業株式会社
往復動ポンプ
1か月前
三菱重工業株式会社
貯留システム
3日前
三菱重工業株式会社
サーバシステム
1か月前
三菱重工業株式会社
リチウム脱離装置
19日前
三菱重工業株式会社
プラントの電力設備
1か月前
三菱重工業株式会社
冷却装置及び冷却方法
17日前
三菱重工業株式会社
炭化炉及びその制御方法
17日前
三菱重工業株式会社
燃焼器及びガスタービン
19日前
三菱重工業株式会社
制御装置および制御方法
1か月前
三菱重工業株式会社
晶析システム及び晶析方法
10日前
三菱重工業株式会社
動翼、及び動翼の加工方法
19日前
三菱重工業株式会社
圧縮機及び圧縮機システム
20日前
三菱重工業株式会社
ブリスク翼、及び回転機械
1か月前
三菱重工業株式会社
電力変換器及び電力システム
24日前
三菱重工業株式会社
軸封組品、及び蒸気タービン
5日前
三菱重工業株式会社
信号処理装置及び信号処理方法
17日前
三菱重工業株式会社
電動機、及び電動機の製造方法
17日前
三菱重工業株式会社
回転電機用回転子及び回転電機
17日前
三菱重工業株式会社
劣化診断方法および劣化診断装置
1か月前
三菱重工業株式会社
ストッカ、及び細胞培養システム
17日前
三菱重工業株式会社
タンクシステム及びガス置換方法
1か月前
三菱重工業株式会社
ストッカ、及び細胞培養システム
19日前
三菱重工業株式会社
容器搬送治具及び細胞培養システム
19日前
三菱重工業株式会社
反応器、及びモノマー製造システム
25日前
三菱重工業株式会社
解析方法、解析装置及びプログラム
27日前
三菱重工業株式会社
殺菌用ユニット、細胞培養システム
18日前
三菱重工業株式会社
画像取得システム及び画像取得方法
1か月前
三菱重工業株式会社
制御装置、溶接システム及び制御方法
1か月前
三菱重工業株式会社
作業管理システム、及び作業管理方法
1か月前
三菱重工業株式会社
電力伝送装置および電力伝送システム
17日前
三菱重工業株式会社
炉心溶融物の処理装置および原子力設備
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ