TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111360
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024095794
出願日
2024-06-13
発明の名称
BSTMQ乱流モデルを用いる回転乱流予測方法
出願人
江蘇科技大学
,
JIANGSU UNIVERSITY OF SCIENCE AND TECHNOLOGY
代理人
弁理士法人コスモス国際特許商標事務所
主分類
G06F
17/13 20060101AFI20250723BHJP(計算;計数)
要約
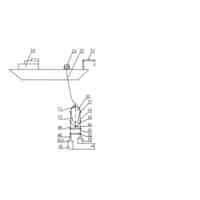
【課題】流体機械の内部流れ場の予測効果を高めることができるBSTMQ乱流モデルを用いる回転乱流予測方法を提供する。
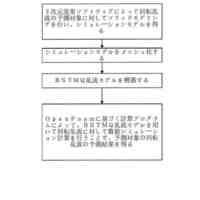
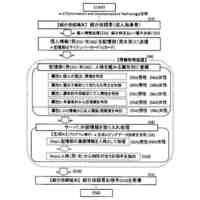
【解決手段】方法は、3次元モデリングソフトウェアによって回転乱流の予測対象に対してソリッドモデリングを行い、シミュレーションモデルを得るステップと、シミュレーションモデルをメッシュ化するステップと、既存のSTRUCT乱流モデルの渦粘性減衰関数を改良し、BSTMQ乱流モデルを構築し、OpenFoamに基づく計算プログラムによって、BSTMQ乱流モデルを用いて回転乱流に対して数値シミュレーション計算を行うことで、予測対象の回転乱流の予測結果を得るステップと、を含む。BSTMQモデルは、回転乱流をより適切にシミュレートし、流体機械の内部流れ場の予測効果を向上させ、流体機械における回転乱流を効率的かつ正確に計算するための新しい考え方を提供することができる。
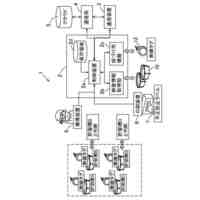
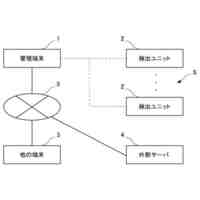
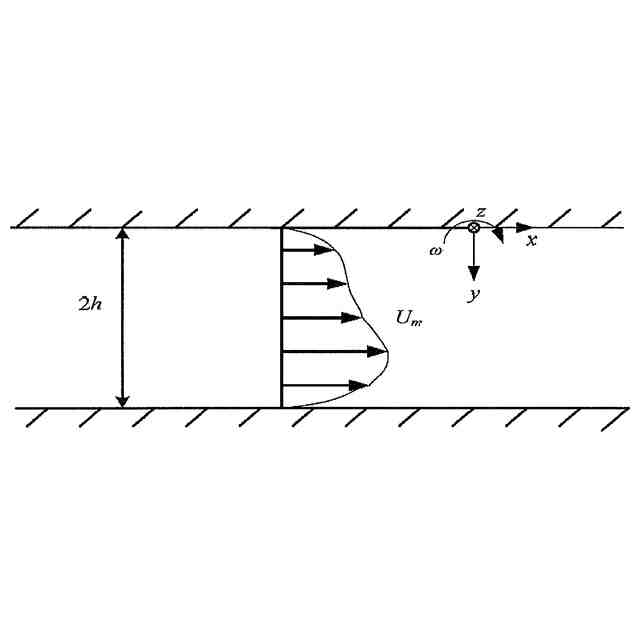
【選択図】図1
特許請求の範囲
【請求項1】
BSTMQ乱流モデルを用いる回転乱流予測方法であって、
3次元モデリングソフトウェアによって回転乱流の予測対象に対してソリッドモデリングを行い、シミュレーションモデルを得るステップ(1)と、
シミュレーションモデルをメッシュ化するステップ(2)と、
既存のSTRUCT乱流モデルに対して分岐法に基づいて回転曲率補正を行い、BSTMQ乱流モデルを構築するステップであって、前記BSTMQ乱流モデルの方程は、以下の通りであり、
TIFF
2025111360000052.tif
32
170
ここで、kは乱流運動エネルギーであり、ωは比散逸率であり、
TIFF
2025111360000053.tif
12
170
は時間に対する乱流運動エネルギーの偏導関数であり、
TIFF
2025111360000054.tif
13
170
は座標方向の乱流運動エネルギーの偏導関数であり、
TIFF
2025111360000055.tif
12
170
は時間に対する比散逸率の偏導関数であり、
TIFF
2025111360000056.tif
14
170
は座標方向の比散逸率の偏導関であり、u
j
は速度であり、C
*
μ
は渦粘性係数の式であり、C
μ
は渦粘性係数であり、Sは歪速度テンソルのモードであり、vは動粘性係数であり、v
T
は渦粘性係数であり、P
k
は乱流運動エネルギー生成項であり、D
f-b
は渦粘性減衰関数であり、б
k
、б
ω
、α、β、F
1
、б
ω2
は定数係数である、ステップ(3)と、
OpenFoamに基づく計算プログラムによって、BSTMQ乱流モデルを用いて回転乱流に対して数値シミュレーション計算を行うことで、予測対象の回転乱流の予測結果を得るステップ(4)と、を含む、ことを特徴とする回転乱流予測方法。
続きを表示(約 3,800 文字)
【請求項2】
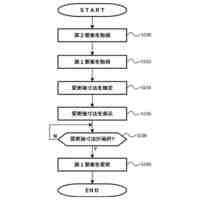
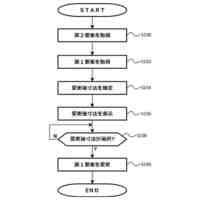
前記ステップ(3)では、BSTMQ乱流モデルを構築するステップは、具体的には、
ステップ(31):回転座標系における歪速度テンソル及び回転速度テンソルを導入し、
ステップ(32):Splart-Shurテンソルを使用して回転効果及び曲率効果を統一し、補正された回転速度テンソルを得て、
ステップ(33):ステップ(31)で導入された歪速度テンソル及びステップ(32)で得られた補正された回転速度テンソルから、速度勾配不変量を作成し、
ステップ(34):ステップ(33)で得られた速度勾配不変量から、補正された解析時間スケールを決定し、
ステップ(35):比散逸率から回転乱流のモデル化時間スケールを決定し、
ステップ(36):ステップ(34)及び(35)に従って、回転効果及び曲率効果を反映する渦粘性減衰関数D
f-b
を構築し、
TIFF
2025111360000057.tif
11
170
ここで、
TIFF
2025111360000058.tif
7
170
であり、
TIFF
2025111360000059.tif
5
170
は無次元速度勾配不変量IIIであり、
TIFF
2025111360000060.tif
5
170
は歪速度テンソルに基づいて構築される無次元速度勾配不変量Iであり、
TIFF
2025111360000061.tif
5
170
は補正された回転速度テンソルに基づいて構築された無次元速度勾配不変量IIであり、αはモデル化時間スケールの経験定数であり、
ステップ(37):BSkOモデルを基盤モデルとして、乱流粘度を補正し、渦粘性減衰関数D
f-b
に従って、分岐法の回転曲率に基づいて補正されるSTRUCT乱流モデル、すなわち、BSTMQ乱流モデルを構築する、ことを特徴とする請求項1に記載の回転乱流予測方法。
【請求項3】
慣性座標系において、歪速度テンソルS
ij
及び回転速度テンソルΩ
ij
の計算式は以下の通りであり、
TIFF
2025111360000062.tif
77
170
ここで、i、及びjはテンソル表現における2つの自由なインデックスであり、どちらも値1、2、及び3をとり、これは、インデックスのすべての値をトラバースする必要があることを意味し、U
i
及びU
j
は速度ベクトルであり、慣性座標系における3方向の速度成分はU
1
=U、U
2
=V、U
3
=Wであり、x
i
及びx
j
は慣性座標系における座標軸であり、x
1
=x、x
2
=y、x
3
=zとして表され、
TIFF
2025111360000063.tif
15
170
は3方向の3つの速度成分の偏導関数であり、
角速度ベクトルΩ
F
k
で回転する座標系において、回転速度テンソルΩ
A
ij
の計算式は以下の通りであり、
TIFF
2025111360000064.tif
15
170
ここで、
・
ijk
は巡回置換演算子であり、Ω
F
ij
は座標系の回転テンソルである、ことを特徴とする請求項2に記載の回転乱流予測方法。
【請求項4】
Splart-Shurテンソルに基づいて回転効果及び曲率効果を統一すると、以下の前記補正された回転速度テンソルΩ
mod
ij
の計算式が得られ、
TIFF
2025111360000065.tif
8
170
ここで、C
r
はモデル定数であり、W
A
ij
は、Splart-Shurテンソルに基づく補正変数である、ことを特徴とする請求項3に記載の回転乱流予測方法。
【請求項5】
補正変数W
A
ij
の決定は、
2次元流れの場合、W
A
ij
=Ω
SS
ij
にすることと、
3次元流れの場合、W
A
ij
=Ω
F
ij
-
・
ijk
w
i
にすることと、を含み、
ここで、Ω
SS
ij
は、Splart-Shurテンソルであり、w
i
は中間変数であり、
TIFF
2025111360000066.tif
10
170
ここで、Ω
F
pq
は、Ω
F
ij
とインデックスが異なる座標系の回転テンソルであり、Ω
SS
rs
は、Ω
SS
ij
とインデックスが異なるSplart-Shurテンソルであり、
・
pqj
及び、
・
rsj
は、
・
ijk
とインデックスが異なる巡回置換演算子であり、X
ij
は中間変数であり、
TIFF
2025111360000067.tif
14
170
ここで、δ
ij
はクロネッカーシンボルテンソルであり、S
ik
、及びS
kj
は、S
ij
とインデックスが異なる歪速度テンソルであり、
TIFF
2025111360000068.tif
10
170
である、ことを特徴とする請求項4に記載の回転乱流予測方法。
【請求項6】
TIFF
2025111360000069.tif
9
170
の計算式は以下の通りであり、
TIFF
2025111360000070.tif
23
170
ここで、kは乱流運動エネルギーであり、εは散逸率であり、Sは歪速度テンソルのモードであり、Ω
mod
は補正された回転速度テンソルのモードである、ことを特徴とする請求項2に記載の回転乱流予測方法。
【請求項7】
前記補正された解析時間スケールは、以下の通りであり、
TIFF
2025111360000071.tif
14
170
ここで、
TIFF
2025111360000072.tif
14
170
であり、
比散逸率から回転乱流のモデル化時間スケールt
m
を決定し、
TIFF
2025111360000073.tif
14
170
ここで、αはモデル化時間スケールの経験定数であり、ωは比散逸率であり、
TIFF
2025111360000074.tif
9
170
は関心の流れ領域において幾何平均演算を行うことを表す、ことを特徴とする請求項6に記載の回転乱流予測方法。
【請求項8】
従来の渦粘性減衰関数D
f
に基づいて、回転効果及び曲率効果を反映する渦粘性減衰関数D
f-b
を構築し、従来の渦粘性減衰関数D
f
は、
TIFF
2025111360000075.tif
12
170
である、ことを特徴とする請求項7に記載の回転乱流予測方法。
【請求項9】
メモリと、プロセッサと、メモリに記憶され、プロセッサで動作可能なコンピュータプログラムと、を含むコンピュータ機器であって、
前記プロセッサは、前記コンピュータプログラムを実行すると、請求項1~8のいずれか1項に記載の方法のステップを実現する、ことを特徴とするコンピュータ機器。
【請求項10】
コンピュータプログラムが記憶されたコンピュータ読み取り可能な記憶媒体であって、
前記コンピュータプログラムは、プロセッサによって実行されると、請求項1~8のいずれか1項に記載の方法のステップを実現する、ことを特徴とするコンピュータ読み取り可能な記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工学流体力学における乱流シミュレーションに関し、具体的には、BSTMQ乱流モデルを用いる回転乱流予測方法に関する。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
近年、計算の正確性と計算コストの両方を考慮した混合乱流モデルは、応用の将来性が期待でき、グリッド空間スケールに基づくさまざまな混合乱流モデルに加えて、Emilion教授が時間スケールに基づいて提案したSTRUCTモデルは、グリッドの単調収束を達成でき、優れた計算精度とロバスト性を備えている。
【0003】
しかし、流体機械では、羽根車が高速回転し、羽根がねじれ、壁面が複雑なため、内部流れ場は強い回転効果及び曲率効果を受ける。既存のSTRUCTモデルは、直接適用できず、次の問題がある。(1)STRUCTモデルの渦粘性減衰は、壁付近の領域では1に近いため、モデルは従来のレイノルズ平均ナビエストークス(RANS:Reynolds-averaged Navier-Stokes)モデルに戻り、回転機械の壁付近の領域の解析には適していない。(2)既存のSTRUCTモデルでは、従来の渦流検出基準に基づいて計算された解析時間スケールは、回転効果及び曲率効果を反映していない。上記の欠陥により、モデルが回転乱流の発達過程を正確に予測できなくなる可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明の目的:以上の問題に対して、本発明は、流体機械の内部流れ場の予測効果を高めることができるBSTMQ乱流モデルを用いる回転乱流予測方法を提供する。
【課題を解決するための手段】
【0005】
技術的解決手段:上記の問題を解決するために、本発明は、BSTMQ乱流モデルを用いる回転乱流予測方法であって、
3次元モデリングソフトウェアによって回転乱流の予測対象に対してソリッドモデリングを行い、シミュレーションモデルを得るステップ(1)と、
シミュレーションモデルをメッシュ化するステップ(2)と、
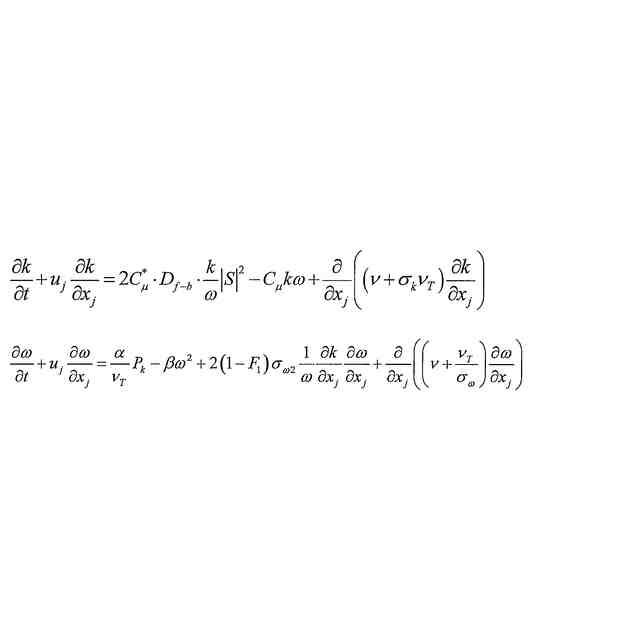
既存のSTRUCT乱流モデルに対して分岐法に基づいて回転曲率補正を行い、BSTMQ乱流モデルを構築するステップであって、前記BSTMQ乱流モデルの方程は、以下の通りであり、
TIFF
2025111360000002.tif
34
170
ここで、kは乱流運動エネルギーであり、ωは比散逸率であり、
TIFF
2025111360000003.tif
11
170
は時間に対する乱流運動エネルギーの偏導関数であり、
TIFF
2025111360000004.tif
108
170
は座標方向の乱流運動エネルギーの偏導関数であり、
TIFF
2025111360000005.tif
11
170
は時間に対する比散逸率の偏導関数であり、
TIFF
2025111360000006.tif
12
170
は座標方向の比散逸率の偏導関であり、u
j
は速度であり、C
*
μ
は渦粘性係数の式であり、C
μ
は渦粘性係数であり、Sは歪速度テンソルのモードであり、vは動粘性係数であり、v
T
は渦粘性係数であり、P
k
は乱流運動エネルギー生成項であり、D
f-b
は渦粘性減衰関数であり、σ
k
、σ
ω
、α、β、F
1
、σ
ω2
は定数係数である、ステップ(3)と、
OpenFoamに基づく計算プログラムによって、BSTMQ乱流モデルを用いて回転乱流に対して数値シミュレーション計算を行うことで、予測対象の回転乱流の予測結果を得るステップ(4)と、を含む、回転乱流予測方法を提供する。
【0006】
さらに、前記ステップ(3)では、BSTMQ乱流モデルを構築するステップは、具体的には、
ステップ(31):回転座標系における歪速度テンソル及び回転速度テンソルを導入し、
ステップ(32):Splart-Shurテンソルを使用して回転効果及び曲率効果を統一し、補正された回転速度テンソルを得て、
ステップ(33):ステップ(31)で導入された歪速度テンソル及びステップ(32)で得られた補正された回転速度テンソルから、速度勾配不変量を作成し、
ステップ(34):ステップ(33)で得られた速度勾配不変量から、補正された解析時間スケールを決定し、
ステップ(35):比散逸率から回転乱流のモデル化時間スケールを決定し、
ステップ(36):ステップ(34)及び(35)に従って、回転効果及び曲率効果を反映する渦粘性減衰関数D
f-b
を構築し、
TIFF
2025111360000007.tif
11
170
ここで、
TIFF
2025111360000008.tif
5
170
であり、
TIFF
2025111360000009.tif
5
170
は無次元速度勾配不変量IIIであり、
TIFF
2025111360000010.tif
5
170
は歪速度テンソルに基づいて構築される無次元速度勾配不変量Iであり、
TIFF
2025111360000011.tif
5
170
は補正された回転速度テンソルに基づいて構築された無次元速度勾配不変量IIであり、αはモデル化時間スケールの経験定数であり、
ステップ(37):BSkOモデルを基盤モデルとして、乱流粘度を補正し、渦粘性減衰関数D
f-b
に従って、分岐法の回転曲率に基づいて補正されるSTRUCT乱流モデル、すなわち、BSTMQ乱流モデルを構築する。
【0007】
さらに、慣性座標系において、歪速度テンソルS
ij
及び回転速度テンソルΩ
ij
の計算式は以下の通りであり、
TIFF
2025111360000012.tif
76
170
ここで、i、及びjはテンソル表現における2つの自由なインデックスであり、どちらも1、2、及び3を取り、これは、インデックスのすべての値をトラバースする必要があることを意味し、U
i
及びU
j
は速度ベクトルであり、慣性座標系における3方向の速度成分はU
1
=U、U
2
=V、U
3
=Wであり、x
i
及びx
j
は慣性座標系における座標軸であり、x
1
=x、x
2
=y、x
3
=zとして表され、
TIFF
2025111360000013.tif
14
170
は3方向の3つの速度成分の偏導関数であり
角速度ベクトルΩ
F
k
で回転する座標系において、回転速度テンソルΩ
A
ij
の計算式は以下の通りであり、
TIFF
2025111360000014.tif
15
170
ここで、
・
ijk
は巡回置換演算子であり、Ω
F
ij
は座標系の回転テンソルである。
【0008】
さらに、Splart-Shurテンソルに基づいて回転効果及び曲率効果を統一すると、以下の前記補正された回転速度テンソルΩ
mod
ij
の計算式が得られ、
TIFF
2025111360000015.tif
7
170
ここで、C
r
はモデル定数であり、W
A
ij
は、Splart-Shurテンソルに基づく補正変数である。
【0009】
さらに、補正変数W
A
ij
の決定は、
2次元流れの場合、W
A
ij
=Ω
SS
ij
にすることと、
3次元流れの場合、W
A
ij
=Ω
F
ij
-
・
ijk
w
i
にすることとを含み、
ここで、Ω
SS
ij
はSplart-Shurテンソルであり、w
i
は中間変数であり、
TIFF
2025111360000016.tif
7
170
ここで、Ω
F
pq
は、Ω
F
ij
とインデックスが異なる座標系の回転テンソルであり、Ω
SS
rs
はΩ
SS
ij
とインデックスが異なるSplart-Shurテンソルであり、
・
pqj
及び
・
rsj
は
・
ijk
とインデックスが異なる巡回置換演算子であり、X
ij
は中間変数であり、
TIFF
2025111360000017.tif
13
170
ここで、δ
ij
はクロネッカーシンボルテンソルであり、S
ik
、及びS
kj
は、S
ij
とインデックスが異なる歪速度テンソルであり、
TIFF
2025111360000018.tif
9
170
である。
【0010】
さらに、
TIFF
2025111360000019.tif
7
170
の計算式は以下の通りであり、
TIFF
2025111360000020.tif
23
170
ここで、kは乱流運動エネルギーであり、εは散逸率であり、Sは歪速度テンソルのモードであり、Ω
mod
は補正された回転速度テンソルのモードである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
江蘇科技大学
深海浮力採鉱システム
2か月前
江蘇科技大学
BSTMQ乱流モデルを用いる回転乱流予測方法
1か月前
江蘇科技大学
ロボット関節モジュール制御システムの最適化方法
1か月前
江蘇科技大学
遺伝性心疾患の遺伝子支援診断システムの動作方法
11か月前
江蘇科技大学
プル型全回転推進器、その制御システム及び制御方法
4か月前
江蘇科技大学
多孔質媒体の流量特性パラメータの測定装置および方法
11か月前
江蘇科技大学
深海魚の浮き袋のバイオニック吸引バケットの基礎及びその作業方法
2か月前
江蘇科技大学
土壌のある点での熱伝導係数のための貫入式その場測定装置及び測定方法
1か月前
江蘇科技大学
陰極と陽極の再循環に基づくSOFC/GT/SCO2ハイブリッドシステム
7か月前
江蘇科技大学
レーザークラッディング再製造のための合金組成物及び合金コーティングの製造方法
1か月前
江蘇科技大学
曲げ可能で高い光電変換効率を有するシリコンへテロ接合太陽電池及びその製造方法
3か月前
江蘇科技大学
マルチサブルーチンの組み合わせに基づくカム成形面の転がり摩耗体積のシミュレーション方法
2日前
個人
裁判のAI化
1か月前
個人
工程設計支援装置
20日前
個人
情報処理システム
1か月前
個人
フラワーコートA
28日前
個人
検査システム
1か月前
個人
冷凍食品輸出支援構造
今日
個人
介護情報提供システム
1か月前
個人
為替ポイント伊達夢貯
今日
個人
携帯情報端末装置
21日前
個人
設計支援システム
1か月前
個人
設計支援システム
1か月前
個人
知財出願支援AIシステム
今日
キヤノン電子株式会社
携帯装置
1か月前
株式会社サタケ
籾摺・調製設備
1か月前
個人
結婚相手紹介支援システム
17日前
個人
不動産売買システム
2か月前
株式会社カクシン
支援装置
1か月前
個人
AIによる情報の売買の仲介
2日前
株式会社アジラ
進入判定装置
6日前
個人
アンケート支援システム
1か月前
個人
備蓄品の管理方法
1か月前
個人
パスポートレス入出国システム
6日前
日本精機株式会社
施工管理システム
2日前
個人
食事受注会計処理システム
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ