TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112145
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006260
出願日
2024-01-18
発明の名称
車両制御方法及び車両制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
B60W
50/08 20200101AFI20250724BHJP(車両一般)
要約
【課題】低車速域の走行シーンにおいて、運転者に対して要求されるペダル操作を減少させることで車両の運転性をより向上させることのできる車両制御方法及び車両制御装置を提供する。
【解決手段】
運転者のアクセルオフ時に駆動トルクを出力する車両100を制御する車両制御方法であって、車両100が過去に所定車速以下の低車速域で走行していた際の車速Vを学習し、車速Vの学習結果に基づいてクリープ時目標車速V
t
を演算し、クリープ時目標車速V
t
に基づいてアクセルオフ時に出力する前記駆動トルクを定める。
【選択図】図3
特許請求の範囲
【請求項1】
運転者のアクセルオフ時に駆動トルクを出力する車両を制御する車両制御方法であって、
前記車両が過去に所定車速以下の低車速域で走行していた際の車速を学習し、
前記車速の学習結果に基づいてクリープ時目標車速を演算し、
前記クリープ時目標車速に基づいて、前記アクセルオフ時に出力する前記駆動トルクを定める、
車両制御方法。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の車両制御方法であって、
前記低車速域で走行していた際の前記車速を、前記車両を運転していた運転者の情報及び/又は前記車両が走行していた走行場所の情報に紐づけて学習する、
車両制御方法。
【請求項3】
請求項2に記載の車両制御方法であって、
前記走行場所の情報には、
該走行場所における混雑度及び/又は広さを示すパラメータが含まれる、
車両制御方法。
【請求項4】
請求項1に記載の車両制御方法であって、
前記車速の学習結果に基づいて定めた前記クリープ時目標車速によって前記車両を制御している際に、運転者によって駆動力及び/又は制動力を修正する修正操作が実行されたか否かを判定し、
前記修正操作の実行判定の結果に応じて再学習を実行する、
車両制御方法。
【請求項5】
請求項4に記載の車両制御方法であって、
前記車両の周辺環境を取得し、
前記周辺環境を参照して前記車両から所定距離範囲内に障害物が存在するか否かを判定し、
前記障害物が存在するか否かの判定結果に基づいて前記再学習の要否を判断する、
車両制御方法。
【請求項6】
請求項1に記載の車両制御方法であって、
前記低車速域で走行していた際の前記車速に加えて加速度及び躍度を学習し、
前記車速、前記加速度、及び前記躍度の学習結果に基づいて、前記クリープ時目標車速、クリープ時目標加速度、及びクリープ時目標躍度を演算し、
前記クリープ時目標車速、前記クリープ時目標加速度、及び前記クリープ時目標躍度に基づいて、前記アクセルオフ時に出力する前記駆動トルクを定める、
車両制御方法。
【請求項7】
運転者のアクセルオフ時に駆動トルクを出力する車両を制御する車両制御装置であって、
前記車両が過去に所定車速以下の低車速域で走行していた際の車速を学習する車速学習部と、
前記車速の学習結果に基づいてクリープ時目標車速を演算する目標車速演算部と、
前記クリープ時目標車速に基づいて、前記アクセルオフ時に出力する前記駆動トルクを定める駆動トルク設定部と、を有する、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御方法及び車両制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、車両の加速度を考慮して、アクセルオフ時に車両に作用させる駆動トルク(クリープトルク)を調節する制御方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-202264号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
駐車場走行時などの低車速域の走行シーンにおいて、運転者はクリープトルクのみでは車速が不足すると感じた場合には、アクセル操作を行うことが想定される。その一方で、歩行者の飛び出しや他車両を発見した場合など、運転者に対して速やかなブレーキの操作が要求される状況が生じる得る。かかる状況においては、運転者に対しては適宜アクセル操作からブレーキ操作への切り替えを行う必要があり、頻繁なペダル操作が要求されることとなる。
【0005】
したがって、本発明の目的は、低車速域の走行シーンにおいて、運転者に対して要求されるペダル操作を減少させることで車両の運転性をより向上させることのできる車両制御方法及び車両制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明のある態様によれば、運転者のアクセルオフ時に駆動トルクを出力する車両を制御する車両制御方法が提供される。この車両制御方法では、車両が過去に所定車速以下の低車速域で走行していた際の車速を学習し、車速の学習結果に基づいてクリープ時目標車速を演算し、クリープ時目標車速に基づいて、アクセルオフ時に出力する前記駆動トルクを定める。
【発明の効果】
【0007】
本発明によれば、低車速域の走行シーンにおいて、運転者に対して要求されるペダル操作を減少させることで車両の運転性をより向上させることができる。
【図面の簡単な説明】
【0008】
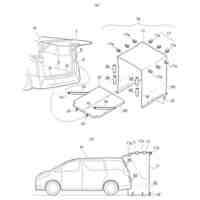
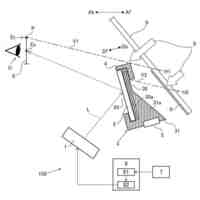
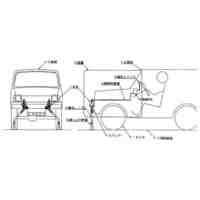
図1は、本発明の実施形態に係る車両制御方法を適用する車両の概略構成図の一例である。
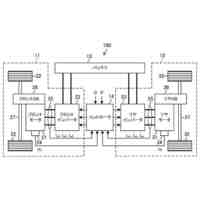
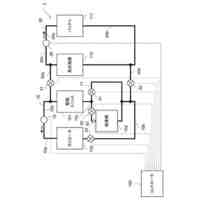
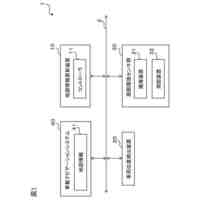
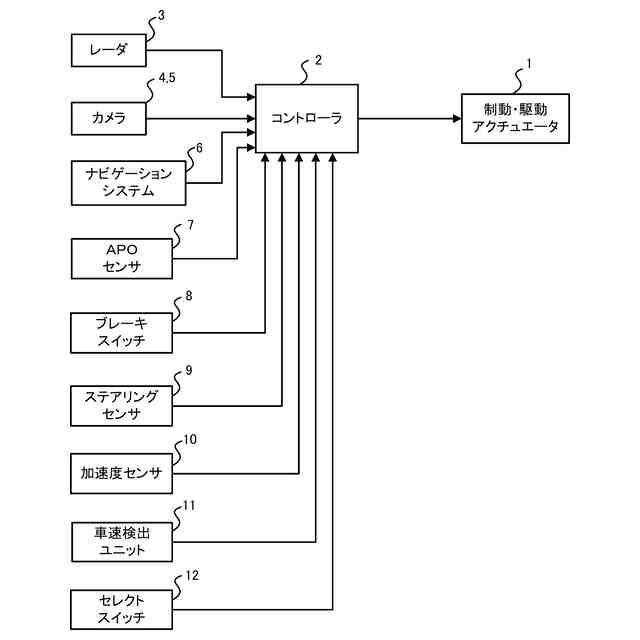
図2は、車両を制御する制御システムの概略構成図の一例である。
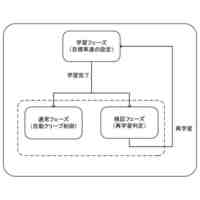
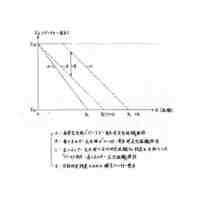
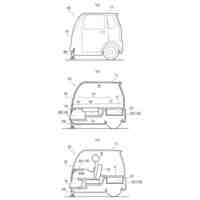
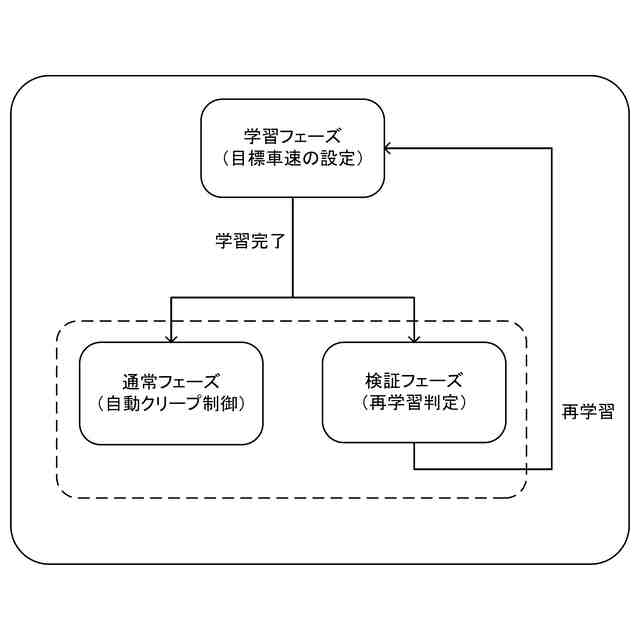
図3は、各制御フェーズの遷移図である。
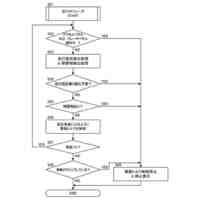
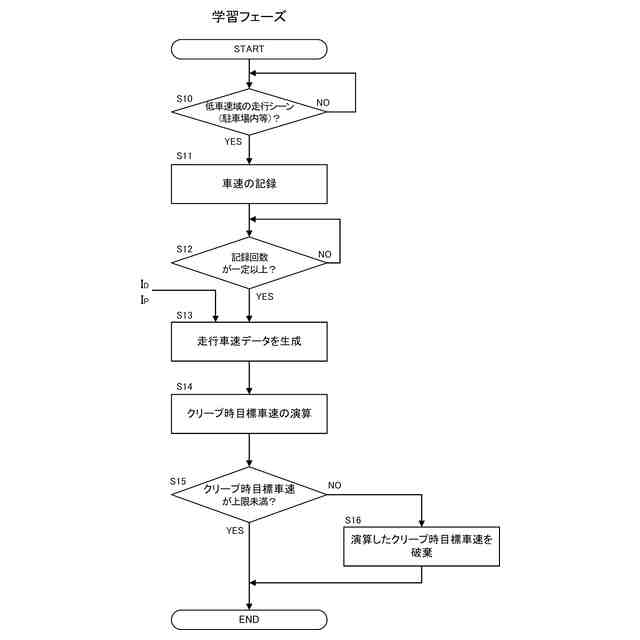
図4は、学習フェーズを説明するフローチャートである。
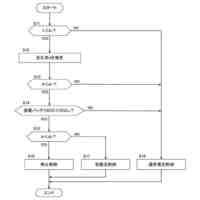
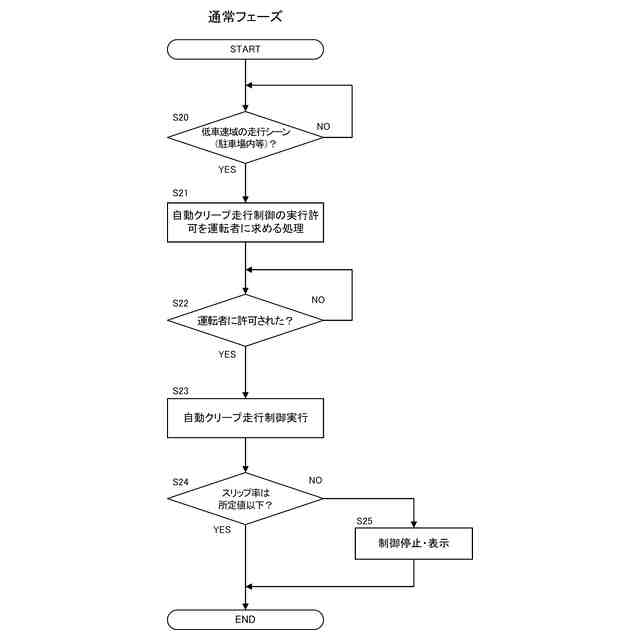
図5は、通常フェーズを説明するフローチャートである。
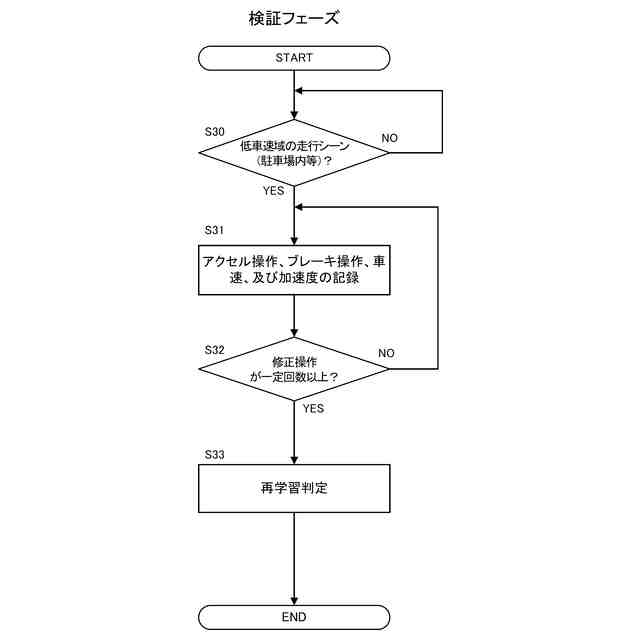
図6は、検証フェーズを説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら本発明の各実施形態について説明する。
【0010】
[第1実施形態]
図1は、本発明の実施形態に係る車両制御方法を適用する車両100を上方から見た概略構成図の一例である。図1において、車両100の前進時の進行方向(紙面上側)を前、後退時の進行方向(紙面下側)を後ろ、前方を向いた状態における左側を左、同右側を右とする。図2は車両100を制御する制御システムの概略構成図の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
車両制御方法及び車両制御装置
2日前
日産自動車株式会社
車両制御方法及び車両制御装置
2日前
日産自動車株式会社
車両制御方法および車両制御装置
4日前
日産自動車株式会社
移動物体認識方法及び移動物体認識装置
1日前
日産自動車株式会社
電動車両の制御方法及び電動車両システム
2日前
日産自動車株式会社
車両の冷媒制御システム及び車両の冷媒制御方法
2日前
日産自動車株式会社
地図情報更新装置及び地図情報更新方法
1日前
個人
カーテント
2か月前
個人
タイヤレバー
3日前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
個人
ホイルのボルト締結
1か月前
日本精機株式会社
ケース
3か月前
個人
車輪清掃装置
2か月前
日本精機株式会社
表示装置
4か月前
個人
車両通過構造物
4日前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
4か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
1か月前
個人
アクセルのソフトウェア
1か月前
個人
ワイパーゴム性能保持具
2か月前
個人
乗合路線バスの客室装置
16日前
個人
ブレーキシステム
4か月前
個人
車両用スリップ防止装置
1か月前
個人
キャンピングトレーラー
1か月前
個人
円湾曲ホイール及び球体輪
16日前
株式会社クラベ
ヒータユニット
2か月前
個人
自動車ドア開度規制ベルト
3か月前
株式会社ニフコ
保持装置
1か月前
個人
車載小物入れ兼雨傘収納具
1か月前
横浜ゴム株式会社
タイヤ
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ