TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113627
公報種別
公開特許公報(A)
公開日
2025-08-04
出願番号
2024007883
出願日
2024-01-23
発明の名称
制御装置
出願人
株式会社ダイヘン
代理人
弁理士法人酒井国際特許事務所
主分類
H05H
1/46 20060101AFI20250728BHJP(他に分類されない電気技術)
要約
【課題】出力電圧の立ち上り時におけるオーバーシュートおよびリンギングの発生を抑制しつつ、出力電圧の立ち上り時間を短くする。
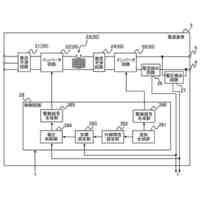
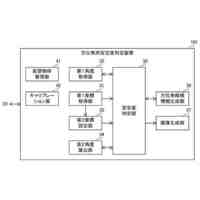
【解決手段】制御装置は、出力制御値に応じた制御信号を電源装置に与えることにより、電源装置から出力される出力電圧をデジタル処理で制御する制御装置であって、出力電圧を表す指令値を予め定められた規範モデルに与えることにより得られる規範出力電圧値と、出力電圧を検出することにより得られる出力電圧値との偏差を小さくする第1制御値を生成する適応制御部と、第1制御値から、出力電圧に含まれる外乱を推定した推定外乱成分に応じた制御量を減じた第2制御値を生成する外乱除去部と、第2制御値を、離散時間系の伝達関数である零点安定化コントローラに与えることにより得られる値を出力制御値として出力する安定化部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
出力制御値に応じた制御信号を電源装置に与えることにより、前記電源装置から出力される出力電圧をデジタル処理で制御する制御装置であって、
前記出力電圧を表す指令値を予め定められた規範モデルに与えることにより得られる規範出力電圧値と、前記出力電圧を検出することにより得られる出力電圧値との偏差を小さくする第1制御値を生成する適応制御部と、
前記第1制御値から、前記出力電圧に含まれる外乱を推定した推定外乱成分に応じた制御量を減じた第2制御値を生成する外乱除去部と、
前記第2制御値を、離散時間系の伝達関数である零点安定化コントローラに与えることにより得られる値を前記出力制御値として出力する安定化部と、
を備え、
前記零点安定化コントローラは、前記電源装置の離散時間系の伝達関数と前記零点安定化コントローラとを乗じた離散時間系の伝達関数における離散化零点の絶対値を最小にする伝達関数である
制御装置。
続きを表示(約 830 文字)
【請求項2】
前記零点安定化コントローラは、式(11)のC(z)により表される離散時間系の伝達関数であり、
TIFF
2025113627000022.tif
18
170
zは、離散時間系の伝達関数の変数であり、
qは、-/τであり、
p
3
=-(4/τ)-(p
1
+p
2
)であり、
p
1
およびp
2
は、前記電源装置を連続時間系の二次遅れ伝達関数により表した場合の極であり、
τは、サンプリング周期であり、
eは、ネイピア数である
請求項1に記載の制御装置。
【請求項3】
前記規範モデルは、離散時間系の一次遅れ伝達関数である
請求項1に記載の制御装置。
【請求項4】
前記適応制御部は、
前記指令値を取得して前記規範出力電圧値を出力する規範モデル部と、
前記規範出力電圧値、前記出力電圧値および前記第2制御値を取得し、モデルフォロイング制御を実行することにより、前記規範出力電圧値に前記出力電圧値を追従させる前記第1制御値を生成するモデルフォロイング制御部と、
を含む請求項3に記載の制御装置。
【請求項5】
前記外乱除去部は、
前記第2制御値を、前記電源装置をモデル化した理想制御対象モデルに与えることにより理想出力電圧値を生成し、
前記理想出力電圧値から前記出力電圧値を減じて前記推定外乱成分を生成し、
前記推定外乱成分を外乱オブザーバに与えることにより、前記推定外乱成分に応じた前記制御量を生成し、
前記外乱オブザーバは、前記電源装置の逆システムを表すモデルと二次のローパスフィルタとを乗じた離散時間系の伝達関数である
請求項1に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
プラズマ処理装置等に用いられる、高周波電力供給システムが知られている。高周波電力供給システムは、一般的には、高周波電圧(進行波電圧)を出力することにより負荷となるプラズマ処理装置等に高周波電力を供給する高周波電源装置とインピーダンス整合を行う整合装置とを含む構成となるが、整合装置を含まない構成とすることもできる。このような高周波電源装置は、安定したレベルの高周波電圧を出力するためにフィードバック制御を行っている。なお、負荷に供給する高周波電力(例えば進行波電力)の電力値を制御対象とする場合は、検出した高周波電力の電力値が目標となる電力値(目標電力値)に一致するように高周波電源装置から出力する高周波電圧をフィードバック制御している。
【先行技術文献】
【特許文献】
【0003】
特開2014-220059号公報
特開2014-204501号公報
【非特許文献】
【0004】
十河拓也、「サンプル値系の零点移動法とモデルフォロイング制御」、計測自動制御学会 適応学習制御シンポジウム、東京工業大学、2011年1月
十河拓也、「サンプル零点移動によるモデル規範型適応制御系の設計」、計測自動制御学会 第11回制御部門大会、琉球大学、2011年3月
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、プラズマ処理装置は高周波電源装置から見た負荷となるが、その負荷インピーダンスはプラズマ処理装置における処理中に時々刻々と変化する。また、整合負荷(高周波電源装置における反射係数が小さい負荷)または全反射負荷等の様々な負荷になり得る。このような広範囲の負荷では、高周波電源装置においてフィードバック制御を実行しても、例えば電力供給の開始時にオーバーシュートおよびリンギングを発生させる可能性があった。このため、例えば特許文献1および特許文献2に記載の高周波電源装置は、電力供給の開始時において、電力フィードバック制御に代えて、高周波信号の電圧の漸近処理を行っていた。すなわち、例えば特許文献1および特許文献2に記載の高周波電力供給システムは、電力供給の開始時において、高周波信号の電圧レベルを時間経過に従って増加させつつ、高周波信号の電圧レベルが指令値に近づくにつれて増加幅を減少させていた。
【0006】
しかしながら、このような従来の高周波電源装置は、電力供給の開始時におけるオーバーシュートおよびリンギングの発生を抑制することはできるが、電力供給の開始時においてフィードバック制御を停止するので高周波信号の電圧レベルが指令値に達するまでの立ち上り時間が長くなってしまっていた。
【0007】
本発明は、上記に鑑みてなされたものであって、例えば、高周波電源装置のような電源装置から出力される出力電圧の立ち上り時におけるオーバーシュートおよびリンギングの発生を抑制しつつ、出力電圧の立ち上り時間を短くすることができる制御装置を提供する。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本発明に係る制御装置は、出力制御値に応じた制御信号を電源装置に与えることにより、前記電源装置から出力される出力電圧をデジタル処理で制御する制御装置であって、前記出力電圧を表す指令値を予め定められた規範モデルに与えることにより得られる規範出力電圧値と、前記出力電圧を検出することにより得られる出力電圧値との偏差を小さくする第1制御値を生成する適応制御部と、 前記第1制御値から、前記出力電圧に含まれる外乱を推定した推定外乱成分に応じた制御量を減じた第2制御値を生成する外乱除去部と、前記第2制御値を、離散時間系の伝達関数である零点安定化コントローラに与えることにより得られる値を前記出力制御値として出力する安定化部と、を備え、前記零点安定化コントローラは、前記電源装置の離散時間系の伝達関数と前記零点安定化コントローラとを乗じた離散時間系の伝達関数における離散化零点の絶対値を最小にする伝達関数である。
【発明の効果】
【0009】
本発明によれば、電源装置から出力される出力電圧の立ち上り時のオーバーシュートおよびリンギングの発生を抑制しつつ、出力電圧の立ち上がり時間を短くすることができる。
【図面の簡単な説明】
【0010】
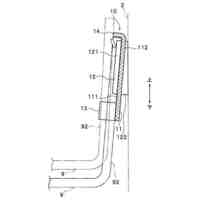
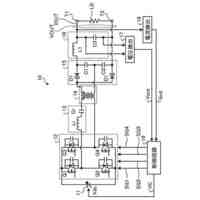
図1は、実施形態に係る電力供給システムの構成を負荷とともに示す図である。
図2は、制御装置の機能構成を示す図である。
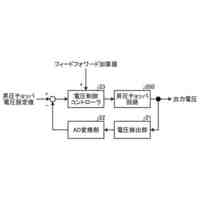
図3は、適応制御部の構成を示す図である。
図4は、外乱除去部の構成を示す図である。
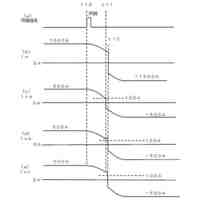
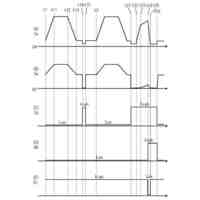
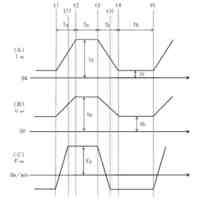
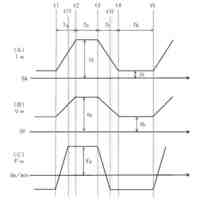
図5は、第1のシミュレーションを実行した結果を示す図である。
図6は、図5の拡大図である。
図7は、第2のシミュレーションを実行した結果を示す図である。
図8は、図7の拡大図である。
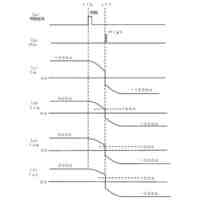
図9は、第3のシミュレーションを実行した結果を示す図である。
図10は、図9の拡大図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
変圧器
18日前
株式会社ダイヘン
制御装置
今日
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
溶接装置
28日前
株式会社ダイヘン
溶接装置
28日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
ヒューズ
2か月前
株式会社ダイヘン
電源装置
5日前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
28日前
株式会社ダイヘン
溶接トーチ
28日前
株式会社ダイヘン
溶接トーチ
27日前
株式会社ダイヘン
溶接ロボット
2か月前
株式会社ダイヘン
溶接電源装置
12日前
株式会社ダイヘン
電力システム
1か月前
株式会社ダイヘン
直流電源回路
27日前
株式会社ダイヘン
溶接電源装置
10日前
株式会社ダイヘン
溶接ロボット
2か月前
株式会社ダイヘン
固相接合装置
12日前
株式会社ダイヘン
安定度向上装置
27日前
株式会社ダイヘン
高周波電源装置
18日前
株式会社ダイヘン
レーザ溶接装置
1か月前
株式会社ダイヘン
プラズマ処理装置
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイヘン
フラックス回収装置
26日前
株式会社ダイヘン
ロボット制御システム
2か月前
株式会社ダイヘン
サブマージアーク溶接機
26日前
株式会社ダイヘン
サブマージアーク溶接機
28日前
株式会社ダイヘン
コイル及び電力授受装置
3日前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
4日前
株式会社ダイヘン
パルスアーク溶接制御方法
4日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ