TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099795
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216729
出願日
2023-12-22
発明の名称
搬送装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/04 20060101AFI20250626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】直線移動機構によって移動させられるハンドを備えた搬送装置において、小型化を図るのに適した構造を提供する。
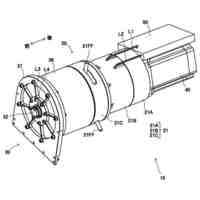
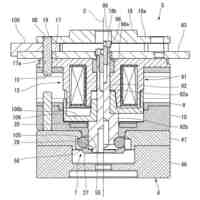
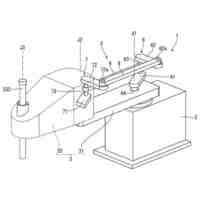
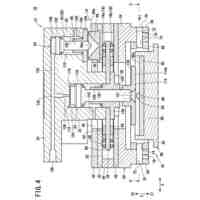
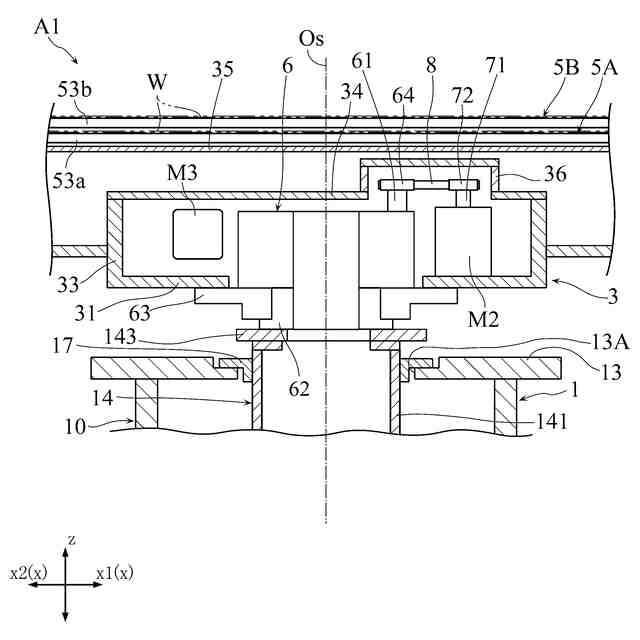
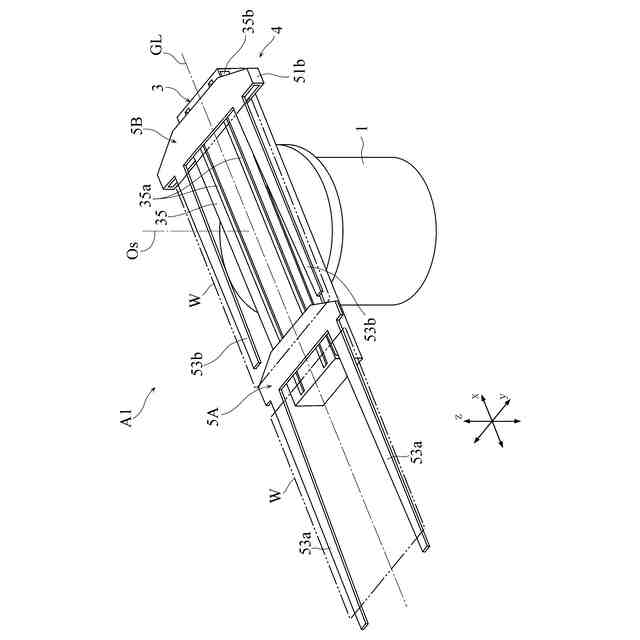
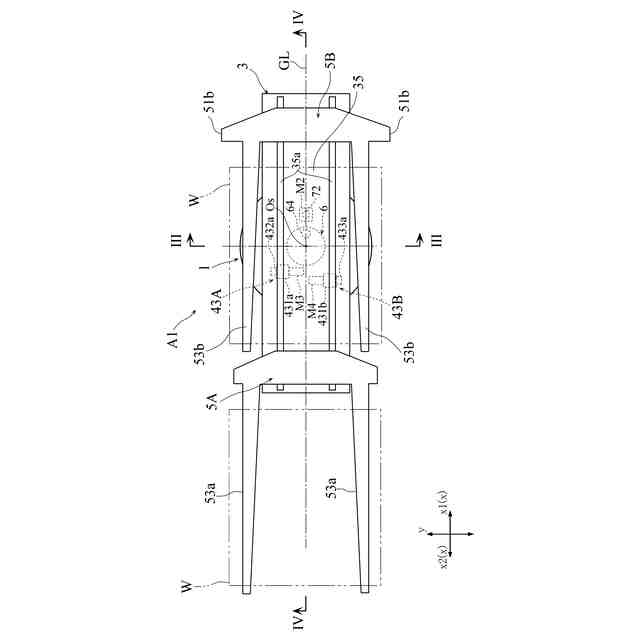
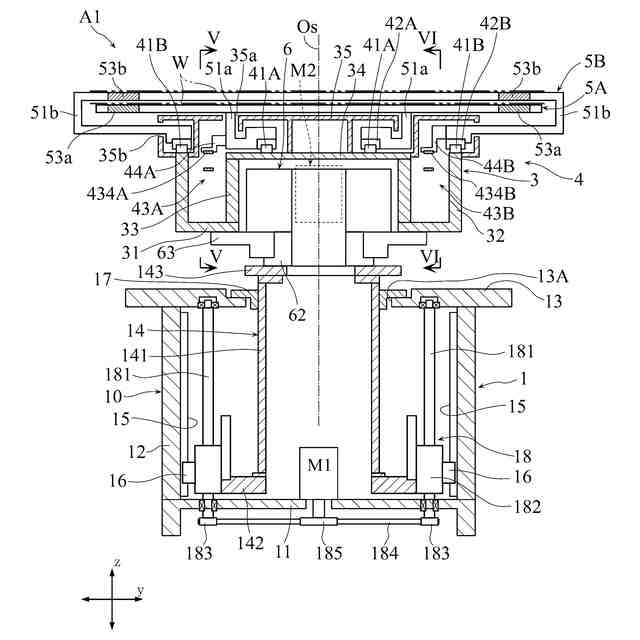
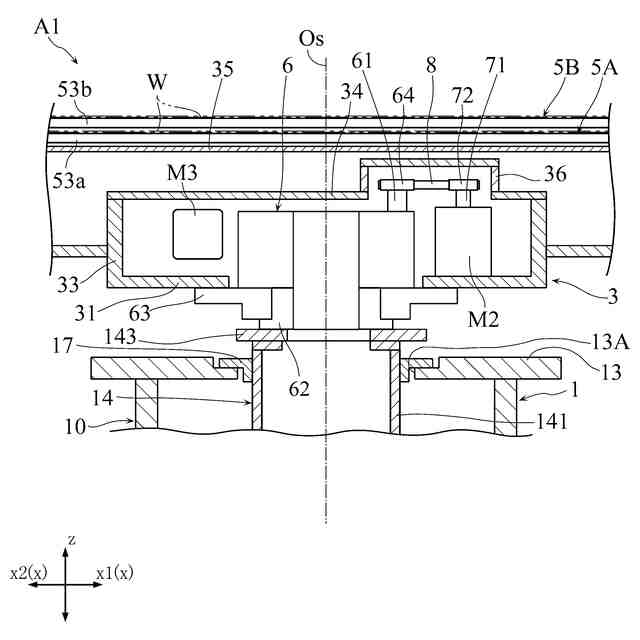
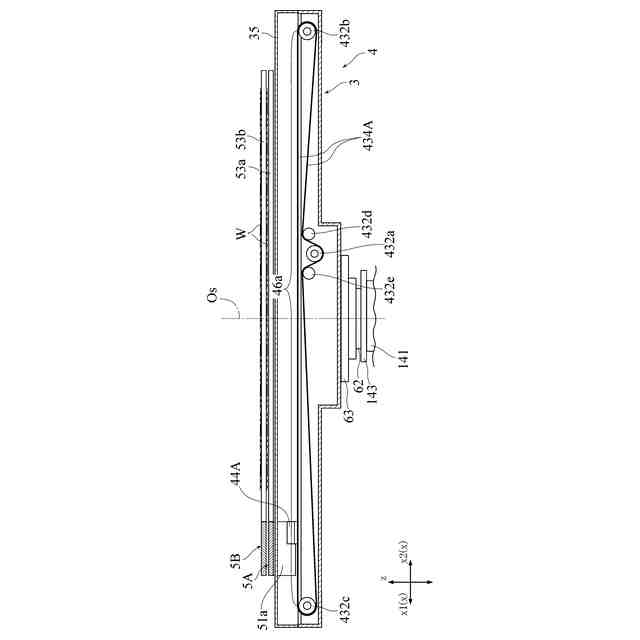
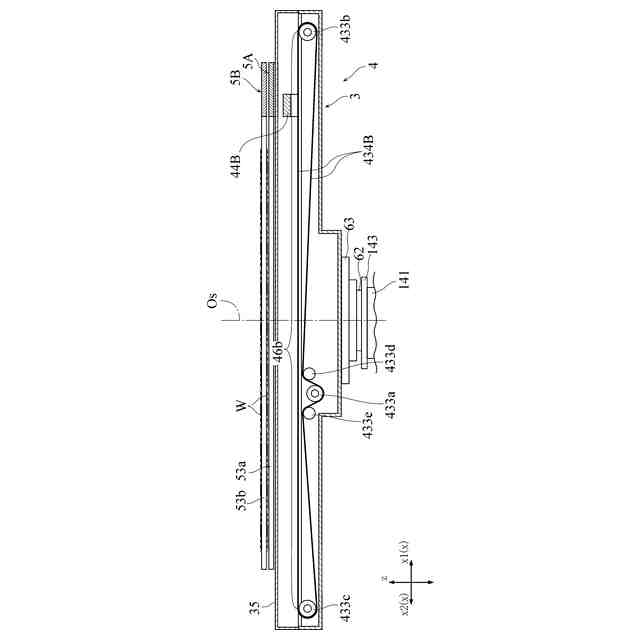
【解決手段】搬送装置A1は、固定ベース1と、固定ベース1に対して垂直状の旋回軸線Osの周りに旋回可能に支持されたガイド部材3と、ガイド部材3に支持された直線移動機構と、直線移動機構に支持され、直線移動機構の作動により第1方向xに延びる水平直線状の移動行程に沿って移動する第1ハンド5Aと、ガイド部材3に旋回駆動力を与えるモータM2(旋回用駆動源)と、第1入力軸61に入力されたモータM2による回転を減速して第1出力軸62から出力する旋回用減速機6と、を備える。旋回用減速機6およびモータM2は、ガイド部材3に固定されており、第1出力軸62は、固定ベース1に直接または間接に取り付けられている。
【選択図】図4
特許請求の範囲
【請求項1】
固定ベースと、
前記固定ベースに対して垂直状の旋回軸線の周りに旋回可能に支持されたガイド部材と、
前記ガイド部材に支持された直線移動機構と、
前記直線移動機構に支持され、前記直線移動機構の作動により第1方向に延びる水平直線状の移動行程に沿って移動する第1ハンドと、
前記ガイド部材に旋回駆動力を与える旋回用駆動源と、
第1入力軸に入力された前記旋回用駆動源による回転を減速して第1出力軸から出力する旋回用減速機と、を備え、
前記旋回用減速機および前記旋回用駆動源は、前記ガイド部材に固定されており、
前記第1出力軸は、前記固定ベースに直接または間接に取り付けられている、搬送装置。
続きを表示(約 690 文字)
【請求項2】
前記直線移動機構は、各々が前記第1方向に延び、且つ鉛直方向および前記第1方向の双方に直交する第2方向に離れて配置された一対の第1ガイドレールを含み、
前記一対の第1ガイドレールは、前記第1ハンドを移動可能に支持しており、
前記旋回用駆動源は、前記旋回用減速機に対して前記第1方向の一方側に位置し、且つ前記第2方向において前記一対の第1ガイドレールの間に位置する、請求項1に記載の搬送装置。
【請求項3】
前記第1入力軸は前記第1出力軸の上方に位置し、
前記旋回用駆動源の出力軸に取り付けられたプーリ、および前記第1入力軸に取り付けられたプーリにベルトが掛け回されている、請求項2に記載の搬送装置。
【請求項4】
前記直線移動機構に支持され、前記直線移動機構の作動により前記第1方向に延びる前記移動行程に沿って移動する第2ハンドと、
前記第1ハンドに駆動力を与えるための第1駆動源と、
前記第2ハンドに駆動力を与えるための第2駆動源と、をさらに備え、
前記第1駆動源および前記第2駆動源は、前記旋回用減速機に対して前記第1方向の他方側に位置する、請求項2または3に記載の搬送装置。
【請求項5】
前記固定ベースに対して昇降可能に支持され、且つ前記ガイド部材を支持する昇降ベースをさらに備え、
前記第1出力軸は、前記昇降ベースに固定されており、
前記旋回用減速機は、前記ガイド部材に固定されたフランジ部を有する、請求項1ないし3のいずれかに記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送装置に関し、より詳細にはワークを直線状に搬送することができる搬送装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
搬送装置のうち、直線状の移動行程に沿ってハンドを移動させる機構(直線移動機構)を持つものがある。このような搬送装置は、たとえば、半導体製造装置の製造工程、あるいは、FPD(Flat Panel Display)の製造工程において、各処理室へのウエハ、あるいはガラス基板等の薄板状のワークの搬入あるいは搬出用として多用されている。
【0003】
このような薄板状のワークを搬送するための搬送装置としては、たとえば下記の特許文献1に開示されたものがある。この搬送装置は、固定ベースと、固定ベースに旋回可能に支持された旋回ベースと、旋回ベースに支持された直線移動機構と、直線移動機構に各別に支持された一対のハンドと、を備えている。直線移動機構は、一対のハンドをそれぞれ駆動する一対の駆動機構(たとえばベルト駆動機構)を有し、駆動機構が駆動すると、ハンドが水平方向に直線移動させられる。これにより、一対のハンドに保持された薄板状ワークを水平直線状の移動行程に沿って各別に搬送することが可能である。
【0004】
固定ベースないし旋回ベースの内部には、旋回ベースを旋回駆動させるためのモータ、および当該モータに対応する減速機が配置されている。上記の旋回駆動用のモータによる駆動力は、減速機を介して旋回ベースに伝達される。
【0005】
近年では、たとえばFPDに使用されるガラス基板等のサイズの大型化により、搬送装置において搬送するべきワークもまた、大型化するとともに相当の重量を有する。また、ワークを保持するハンドの移動距離についても長大化が求められる。そうすると、旋回ベースを駆動させるためのモータおよび減速機もそれぞれ大型化し、搬送装置全体の大型化を招く傾向にあった。
【先行技術文献】
【特許文献】
【0006】
特開2008-272847号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本開示は、このような事情のもとで考え出されたものであって、直線移動機構によって移動させられるハンドを備えた搬送装置において、小型化を図るのに適した構造を提供することを主たる課題とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本開示では、次の技術的手段を採用した。
【0009】
本開示によって提供される搬送装置は、固定ベースと、前記固定ベースに対して垂直状の旋回軸線の周りに旋回可能に支持されたガイド部材と、前記ガイド部材に支持された直線移動機構と、前記直線移動機構に支持され、前記直線移動機構の作動により第1方向に延びる水平直線状の移動行程に沿って移動する第1ハンドと、前記ガイド部材に旋回駆動力を与える旋回用駆動源と、第1入力軸に入力された前記旋回用駆動源による回転を減速して第1出力軸から出力する旋回用減速機と、を備え、前記旋回用減速機および前記旋回用駆動源は、前記ガイド部材に固定されており、前記第1出力軸は、前記固定ベースに直接または間接に取り付けられている。
【0010】
好ましい実施の形態においては、前記直線移動機構は、各々が前記第1方向に延び、且つ鉛直方向および前記第1方向の双方に直交する第2方向に離れて配置された一対の第1ガイドレールを含み、前記一対の第1ガイドレールは、前記第1ハンドを移動可能に支持しており、前記旋回用駆動源は、前記旋回用減速機に対して前記第1方向の一方側に位置し、且つ前記第2方向において前記一対の第1ガイドレールの間に位置する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
9日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
2日前
株式会社ダイヘン
搬送装置
2日前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
学校法人五島育英会
アーム機構
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
24日前
住友重機械工業株式会社
支援装置
2日前
住友重機械工業株式会社
支援装置
2日前
アピュアン株式会社
衝撃工具
4日前
ホシデン株式会社
分解用治具
2日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
17日前
株式会社リコー
多関節ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
川崎重工業株式会社
ロボットシステム
18日前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
2日前
株式会社安川電機
ロボット
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ジャノメ
ロボット
26日前
小倉クラッチ株式会社
ロボット用ツール交換装置
1か月前
セイコーエプソン株式会社
ロボット
12日前
セイコーエプソン株式会社
ロボット
1か月前
株式会社マキタ
回転工具
19日前
株式会社マキタ
電動工具
16日前
個人
工具、工具セット、部材取外し方法
12日前
SMC株式会社
コンプライアンスユニット
23日前
オムロン株式会社
ロボット
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ