TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083052
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196716
出願日
2023-11-20
発明の名称
移動体
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20250523BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡易な構成によって自己位置を取得することができる移動体を提供する。
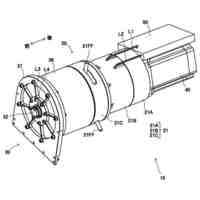
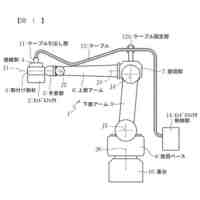
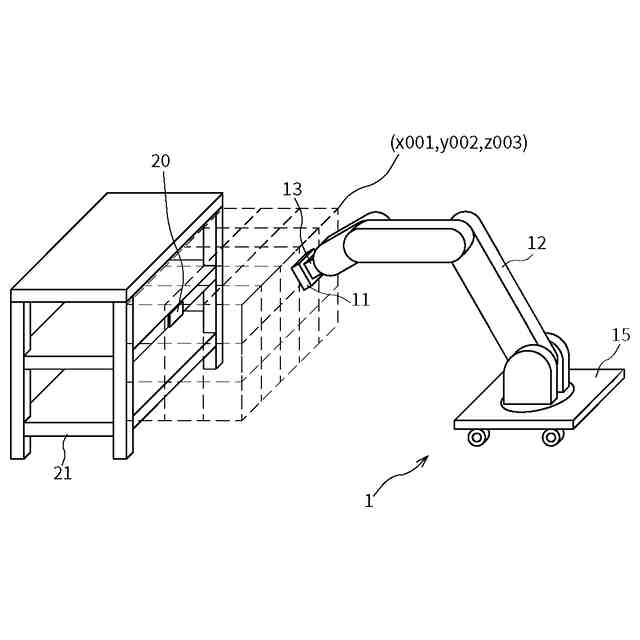
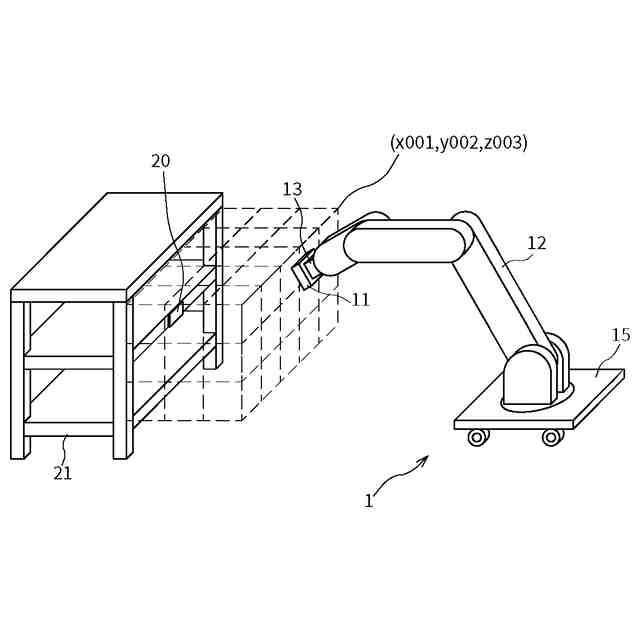
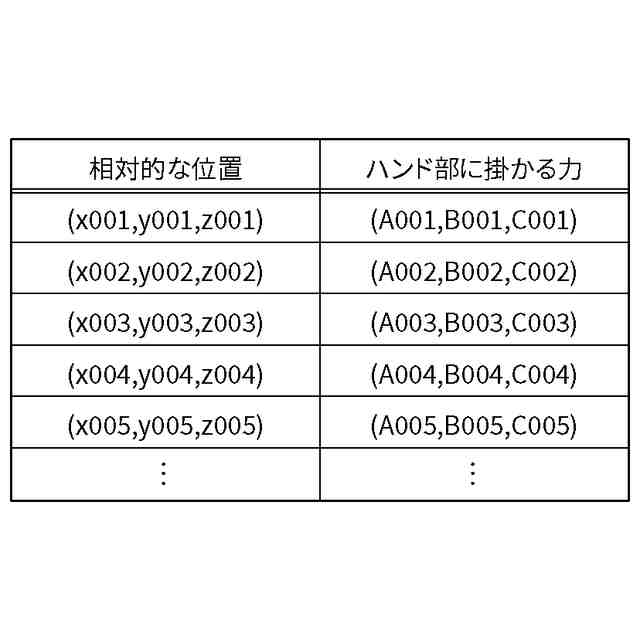
【解決手段】移動体1は、磁石を有するハンド部11と、ハンド部11を移動させるロボット12と、ハンド部11に掛かる力を取得するための力センサ13と、移動機構14を有しており、ロボット12の基端側が固定される移動台車15と、ロボット12を制御してハンド部11を移動させるロボット制御部16と、基準磁石20に対するハンド部11の相対的な位置とハンド部11に掛かる力とを対応付ける対応情報が記憶される記憶部17と、2以上の異なる位置に存在するハンド部11に掛かる力と対応情報とを用いて、移動体1の自己位置を取得する自己位置取得部18と、自己位置を用いて移動機構14を制御する移動制御部19とを備える。このような構成により、磁石を用いた簡易な構成によって自己位置を取得することができる。
【選択図】図1
特許請求の範囲
【請求項1】
移動体であって、
磁石を有するハンド部と、
前記ハンド部を移動させるためのロボットと、
前記ハンド部に掛かる力を取得するための力センサと、
前記移動体を移動させる移動機構を有しており、前記ロボットの基端側が固定される移動台車と、
前記ロボットを制御することによって前記ハンド部を移動させるロボット制御部と、
前記移動体の移動環境におけるあらかじめ決められた位置に配置された磁石である基準磁石に対する前記ハンド部の相対的な位置と、当該相対的な位置に存在する前記ハンド部に掛かる力とを対応付ける2以上の対応情報が記憶される記憶部と、
前記力センサを用いて取得した、2以上の異なる位置に存在する前記ハンド部に掛かる力と、前記2以上の対応情報とを用いて、前記移動体の自己位置を取得する自己位置取得部と、
前記自己位置取得部によって取得された自己位置を用いて、前記移動機構を制御する移動制御部と、を備えた移動体。
続きを表示(約 350 文字)
【請求項2】
前記ハンド部に掛かる力は、前記力センサの測定値である、請求項1記載の移動体。
【請求項3】
前記ハンド部に掛かる力は、前記基準磁石によって前記ハンド部に加えられる力である、請求項1記載の移動体。
【請求項4】
前記2以上の異なる位置は、前記移動台車が停止している場合に、前記ロボットによって移動された前記ハンド部の2以上の異なる位置である、請求項1記載の移動体。
【請求項5】
前記2以上の異なる位置は、前記移動台車によって移動された前記ハンド部の2以上の異なる位置である、請求項1記載の移動体。
【請求項6】
前記自己位置取得部は、時系列フィルタを用いて自己位置を取得する、請求項1から請求項5のいずれか記載の移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ハンド部を移動させるためのロボットを有する移動体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、レーザレンジセンサやイメージセンサによって取得された情報を用いて、基準位置への位置合わせを行う移動体が知られている。(特許文献1参照)。また、無人搬送車によって搬送可能なロボットにおいて、床面に設けられた孔に位置決めピンを挿入することによる高精度な位置決めが行われている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-135832号公報
特開2020-082233号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、レーザレンジセンサやイメージセンサを用いた位置合わせは、照明等の影響を受けやすいという問題がある。例えば、反射物の多い場所ではレーザレンジセンサを用いた位置合わせが難しく、暗い場所ではイメージセンサを用いた位置合わせが難しいという問題がある。
【0005】
また、架台を使用できない場合には、特許文献2に記載された方法を用いることができない。また、特許文献2に記載された方法では、特殊な架台を用意したり、床面に位置決め用の孔を設けたりする必要があり、そのためのコストが掛かるという問題もある。
【0006】
本発明は、上記課題を解決するためになされたものであり、レーザレンジセンサやイメージセンサ、架台を用いることなく、自己位置を取得することができる移動体を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の一態様による移動体は、移動体であって、磁石を有するハンド部と、ハンド部を移動させるためのロボットと、ハンド部に掛かる力を取得するための力センサと、移動体を移動させる移動機構を有しており、ロボットの基端側が固定される移動台車と、ロボットを制御することによってハンド部を移動させるロボット制御部と、移動体の移動環境におけるあらかじめ決められた位置に配置された磁石である基準磁石に対するハンド部の相対的な位置と、相対的な位置に存在するハンド部に掛かる力とを対応付ける2以上の対応情報が記憶される記憶部と、力センサを用いて取得した、2以上の異なる位置に存在するハンド部に掛かる力と、2以上の対応情報とを用いて、移動体の自己位置を取得する自己位置取得部と、自己位置取得部によって取得された自己位置を用いて、移動機構を制御する移動制御部と、を備えたものである。
【発明の効果】
【0008】
本発明の一態様による移動体によれば、基準磁石によってハンド部に掛かる力を取得することによって、移動体の自己位置を取得することができる。そのため、例えば、レーザレンジセンサやイメージセンサ、架台を用いることなく、基準磁石に対する位置決めを行うことができるようになる。
【図面の簡単な説明】
【0009】
本発明の実施の形態による移動体の構成を示す外観模式図
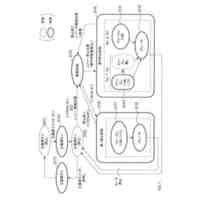
同実施の形態による移動体の構成を示す機能ブロック図
同実施の形態における対応情報の一例を示す図
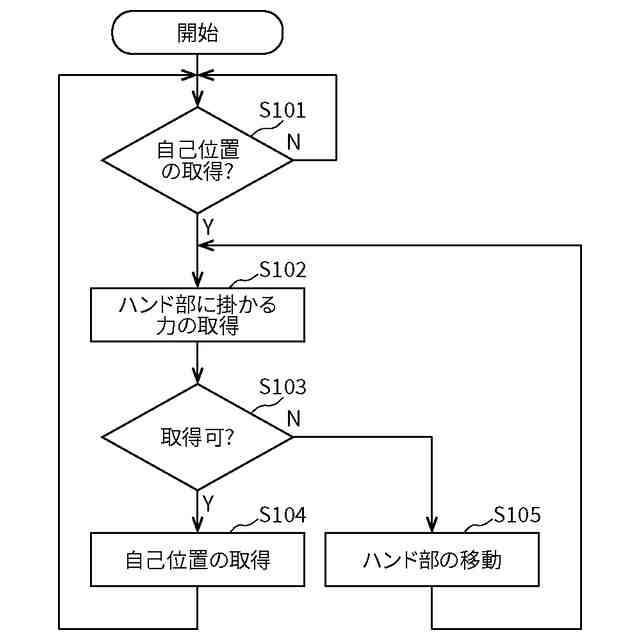
同実施の形態による移動体の自己位置の取得の動作を示すフローチャート
【発明を実施するための形態】
【0010】
以下、本発明による移動体について、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態による移動体は、ハンド部が有する磁石と、移動体の移動環境に配置された基準磁石との間の磁力によってハンド部に掛かる力を取得することによって、移動体の自己位置を取得するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
27日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
16日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
20日前
住友重機械工業株式会社
教示装置
13日前
株式会社ダイヘン
搬送装置
20日前
川崎重工業株式会社
ロボット
14日前
東京都公立大学法人
対象物把持装置
2か月前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
13日前
住友重機械工業株式会社
支援装置
20日前
株式会社PILLAR
チューブ保持治具
2か月前
住友重機械工業株式会社
支援装置
20日前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
22日前
オークラ輸送機株式会社
ハンド装置
2か月前
株式会社マキタ
電気機器
14日前
株式会社スター精機
産業用ロボット
1か月前
ホシデン株式会社
分解用治具
20日前
工機ホールディングス株式会社
作業機
16日前
株式会社マキタ
電動作業機
1か月前
工機ホールディングス株式会社
作業機
16日前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
16日前
株式会社リコー
多関節ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
20日前
工機ホールディングス株式会社
作業機
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ