TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117151
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011863
出願日
2024-01-30
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
60/00 20200101AFI20250804BHJP(車両一般)
要約
【課題】車両の走行のための遠隔制御と、検査の実施とにより、通信帯域が圧迫されることを回避できる技術を提供する。
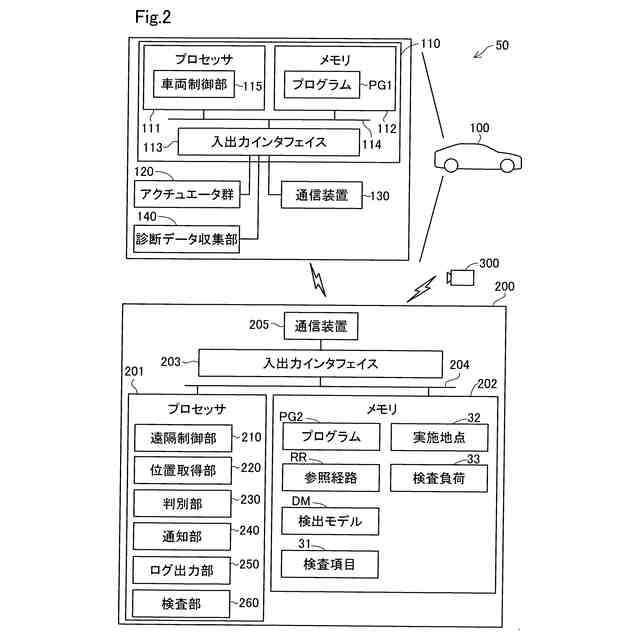
【解決手段】無人運転により走行する移動体を制御する制御装置と移動体とは、移動体の無人運転による走行の制御のための通信と、移動体の検査のための通信と、を、同一回線を介して行う。制御装置は、移動体の現在の位置を示す位置情報を取得する位置取得部と、記憶部であって、移動体の予定された走行経路において移動体に対して実施される1以上の検査と、検査それぞれに対応付けられており、走行経路における検査が実施される地点と、を示す第1情報と、検査に対応付けられており、検査のための通信における通信負荷を示す第2情報と、を記憶する記憶部と、位置情報と、第1情報と、第2情報と、に基づいて、移動体に無人運転による走行をさせるか否かを判別する判別部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
無人運転により走行する移動体を制御する制御装置であって、
前記制御装置と前記移動体とは、前記移動体の無人運転による走行の制御のための通信と、前記移動体の検査のための通信と、を、同一回線を介して行い、
前記制御装置は、
前記移動体の現在の位置を示す位置情報を取得する位置取得部と、
記憶部であって、
前記移動体の予定された走行経路において前記移動体に対して実施される1以上の検査と、前記検査それぞれに対応付けられており、前記走行経路における前記検査が実施される地点と、を示す第1情報と、
前記検査に対応付けられており、前記検査のための通信における通信負荷を示す第2情報と、
を記憶する記憶部と、
前記位置情報と、前記第1情報と、前記第2情報と、に基づいて、前記移動体に前記無人運転による走行をさせるか否かを判別する判別部と、
を備える制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記判別部は、
前記位置情報と前記第1情報とに基づいて、次に実施される前記検査を特定し、
特定された前記検査と前記第2情報とに基づいて、特定された前記検査の実施における前記通信負荷があらかじめ定められた条件を満たす場合に、前記移動体に前記無人運転による走行をさせないと判別する、
制御装置。
【請求項3】
請求項1に記載の制御装置であって、
前記第2情報は、前記検査について前記移動体の走行の要否を示す情報をさらに含み、
前記判別部は、
前記位置情報と前記第1情報とに基づいて、次に実施される前記検査を特定し、
特定された前記検査について前記移動体の走行の可否を前記第2情報に基づいて判別し、
特定された前記検査が前記移動体の走行を要する場合に、
前記移動体に前記無人運転による走行をさせ、
特定された前記検査に含まれる複数の検査項目のうち前記第2情報に基づき走行を要する検査項目だけを実施することを決定する、
制御装置。
【請求項4】
請求項1に記載の制御装置であって、
前記第2情報は、前記検査の実施と前記移動体の移動とのうち優先して実施されるべき処理を示す情報をさらに含み、
前記判別部は、
前記位置情報と前記第1情報とに基づいて次に実施される前記検査を特定し、
特定された前記検査の実施を前記移動体の移動より優先して実施すべきと判別した場合に、前記移動体を走行させずに、特定された前記検査を実施し、
特定された前記検査の実施よりも前記移動体の移動を優先して実施すべきと判別した場合に、前記移動体を走行させ、前記移動体が目的地に到着すると前記移動体の走行の制御のための通信をやめ、その後、前記検査を実施する、
制御装置。
【請求項5】
請求項1から4のいずれか一項に記載の制御装置であって、
前記移動体に前記無人運転による走行をさせると前記判別部が判別した場合に、前記移動体に前記無人運転による走行をさせる旨をユーザに通知する通知部と、
前記移動体に前記無人運転による走行をさせると前記判別部が判別した場合に、その旨をログとして出力する出力部と、
の少なくとも一方をさらに備える制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
特許文献1には、車両を製造するための製造工程において、製造の対象であるとともに遠隔制御によって走行する車両について記載されている。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
製造工程において、未完成状態の車両を複数の工程間で遠隔制御により走行させたり、走行している車両の検査を遠隔地から実施したりすることがある。このような場合、車両と遠隔地にある制御装置とがDLCコネクタを介して通信することがある。そのような態様においては、走行制御のための通信と、検査のための通信と、の双方により、通信帯域が圧迫されてしまい、通信障害が発生することが想定される。このため、車両の走行のための遠隔制御と検査の実施とにより、通信帯域が圧迫されることを回避できる技術が求められていた。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
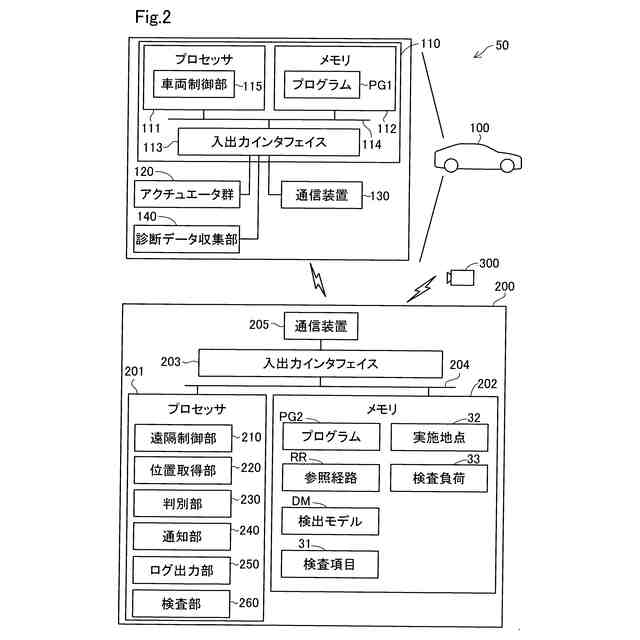
(1)本開示の第1形態によれば、無人運転により走行する移動体を制御する制御装置が提供される。前記制御装置と前記移動体とは、前記移動体の無人運転による走行の制御のための通信と、前記移動体の検査のための通信と、を、同一回線を介して行う。この制御装置は、前記移動体の現在の位置を示す位置情報を取得する位置取得部と、記憶部であって、前記移動体の予定された走行経路において前記移動体に対して実施される1以上の検査と、前記検査それぞれに対応付けられており、前記走行経路における前記検査が実施される地点と、を示す第1情報と、前記検査と、前記検査に対応付けられており、前記検査のための通信における通信負荷を示す第2情報と、を記憶する記憶部と、前記位置情報と、前記第1情報と、前記第2情報と、に基づいて、前記移動体に前記無人運転による走行をさせるか否かを判別する判別部と、を備える。
上記形態によれば、移動体の現在の位置を示す位置情報と、予定された走行経路において移動体に対して実施される1以上の検査と検査が実施される地点を示す第1情報と、移動体に対して実施される検査における通信負荷を示す第2情報と、を用いることにより、移動体の走行を継続するか否かを容易に判別できる。
(2)上記形態の制御装置において、前記判別部は、前記位置情報と前記第1情報とに基づいて、次に実施される前記検査を特定し、特定された前記検査と前記第2情報とに基づいて、特定された前記検査の実施における前記通信負荷があらかじめ定められた条件を満たす場合に、前記移動体に前記無人運転による走行をさせないと判別してもよい。
上記形態によれば、検査の実施の際の通信負荷があらかじめ定められた条件を満たす場合には、移動体に無人運転による走行をさせない。よって、移動体の走行の制御のための通信が制限されるので、通信帯域の圧迫を回避できる。
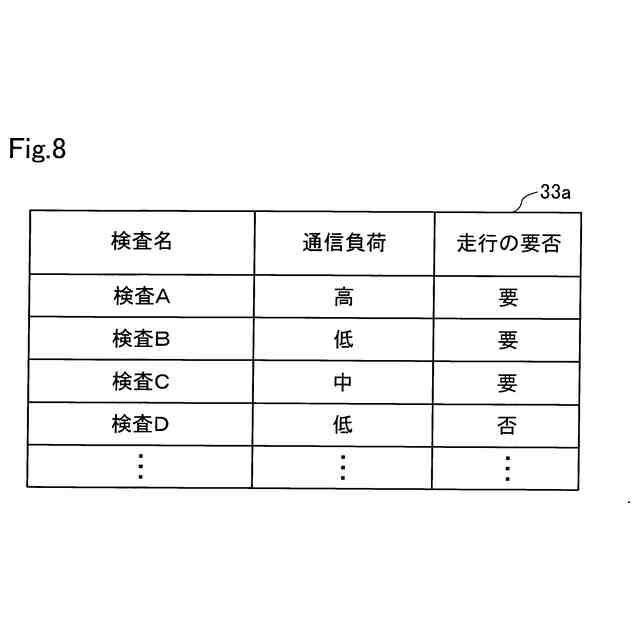
(3)上記形態の制御装置において、前記第2情報は、前記検査について前記移動体の走行の要否を示す情報をさらに含む。前記判別部は、前記位置情報と前記第1情報とに基づいて次に実施される前記検査を特定し、特定された前記検査について前記移動体の走行の可否を前記第2情報に基づいて判別し、特定された前記検査が前記移動体の走行を要する場合に、前記移動体に前記無人運転による走行をさせ、特定された前記検査に含まれる複数の検査項目のうち前記第2情報に基づき走行を要する検査項目だけを実施することを決定してもよい。
(4)上記形態の制御装置において、前記第2情報は、前記検査の実施と前記移動体の移動とのうち優先して実施されるべき処理を示す情報をさらに含む。前記判別部は、前記位置情報と前記第1情報とに基づいて次に実施される前記検査を特定し、特定された前記検査の実施を前記移動体の移動より優先して実施すべきと判別した場合に、前記移動体を走行させずに、特定された前記検査を実施し、特定された前記検査の実施よりも前記移動体の移動を優先して実施すべきと判別した場合に、前記移動体を走行させ、前記移動体が目的地に到着すると前記移動体の走行の制御のための通信をやめ、その後、前記検査を実施してもよい。
上記形態によれば、移動体の移動と検査の実施とのうちいずれを優先すべきかを容易に判別できる。
(5)上記形態の制御装置において、前記移動体に前記無人運転による走行をさせると前記判別部が判別した場合に、前記移動体に前記無人運転による走行をさせる旨をユーザに通知する通知部と、前記移動体に前記無人運転による走行をさせると前記判別部が判別した場合に、その旨をログとして出力する出力部と、の少なくとも一方をさらに備えてもよい。
【0007】
なお、本開示は、種々の形態で実現することが可能であり、例えば、遠隔操作システム、車両制御装置、遠隔自動運転方法、及び、車両の製造方法等の態様で実現することが可能である。
【図面の簡単な説明】
【0008】
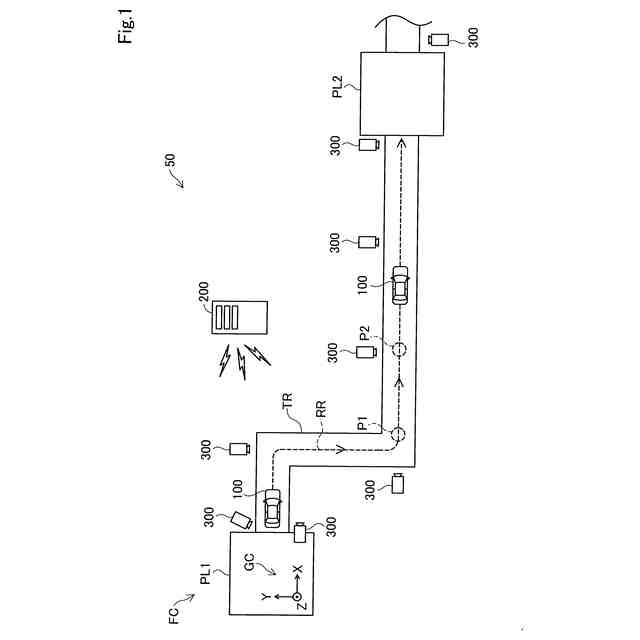
第1実施形態におけるシステムの構成を示す概念図である。
第1実施形態におけるシステムの概略構成を示すブロック図である。
検査項目の例を示す説明図である。
実施地点の例を示す説明図である。
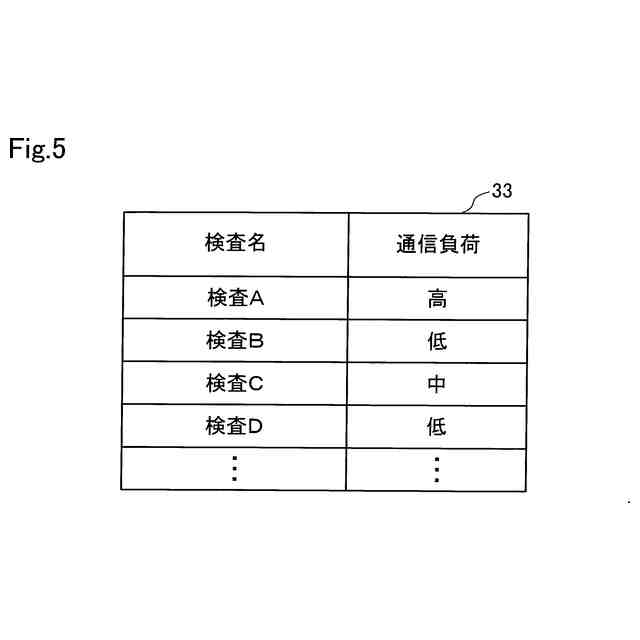
検査負荷の例を示す説明図である。
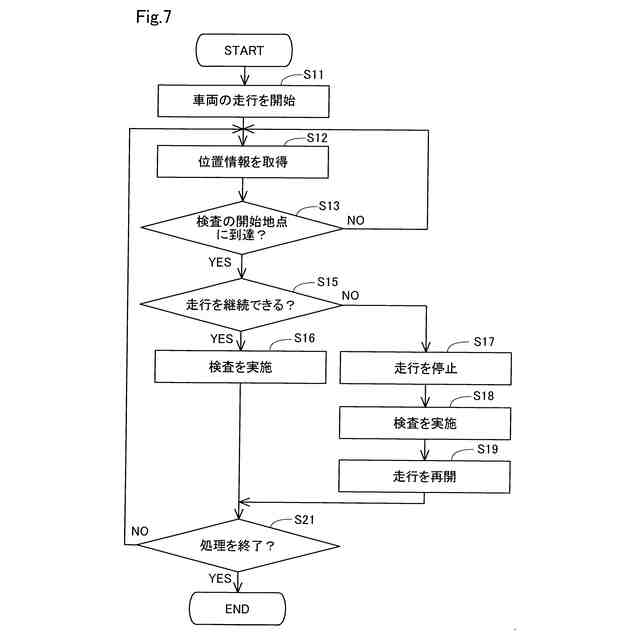
第1実施形態における車両の走行制御の処理手順を示すフローチャートである。
第1実施形態における検査に関する処理手順を示すフローチャートである。
第3実施形態における検査負荷の例を示す説明図である。
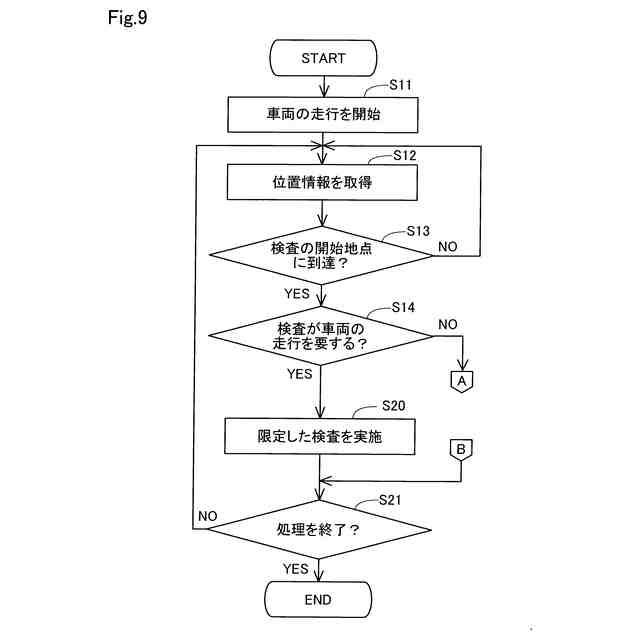
第3実施形態における検査に関する処理手順の前半部分を示すフローチャートである。
第3実施形態における検査に関する処理手順の後半部分を示すフローチャートである。
第4実施形態における検査負荷の例を示す説明図である。
第4実施形態における検査に関する処理手順を示すフローチャートである。
車両を退避領域へ退避させる場合についての説明図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1は、第1実施形態におけるシステム50の構成を示す概念図である。システム50は、移動体を製造する工場FCにおいて、移動体である車両100を無人運転により移動させるために用いられる。システム50は、1以上の車両100と、サーバ200と、複数の外部センサ300とを備える。車両100は、BEV(Battery Electric Vehicle)である。
【0010】
車両100は、無人運転により走行可能に構成されている。「無人運転」とは、搭乗者の走行操作によらない運転を意味する。走行操作とは、車両100の「走る」、「曲がる」、「止まる」の少なくともいずれかに関する操作を意味する。無人運転は、車両100の外部に位置する装置を用いた自動の遠隔制御によって実現される。無人運転によって走行している車両100には、走行操作を行わない搭乗者が搭乗していてもよい。走行操作を行わない搭乗者には、例えば、単に車両100の座席に着座している人や、組み付け、検査、スイッチ類の操作といった走行操作とは異なる作業を車両100に乗りながら行っている人が含まれる。なお、搭乗者の走行操作による運転は、「有人運転」と呼ばれることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
減圧弁
12日前
トヨタ自動車株式会社
ロータ
12日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
光電極
10日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
ロータ
3日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
モータ
3日前
トヨタ自動車株式会社
着磁装置
3日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
ギア構造
2日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
熱交換器
12日前
トヨタ自動車株式会社
集電端子
3日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
コネクタ
12日前
トヨタ自動車株式会社
押湯入子
4日前
トヨタ自動車株式会社
処理装置
4日前
トヨタ自動車株式会社
収容装置
3日前
トヨタ自動車株式会社
端末装置
3日前
トヨタ自動車株式会社
回転電機
8日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
月面車両
3日前
トヨタ自動車株式会社
システム
10日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
車体構造
1日前
トヨタ自動車株式会社
評価装置
15日前
トヨタ自動車株式会社
電子装置
10日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ