TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025119990
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015168
出願日
2024-02-02
発明の名称
自律走行ロボット
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
5/00 20060101AFI20250807BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】安全に走行しながら警備動作を実行できる自律走行ロボットを提供する。
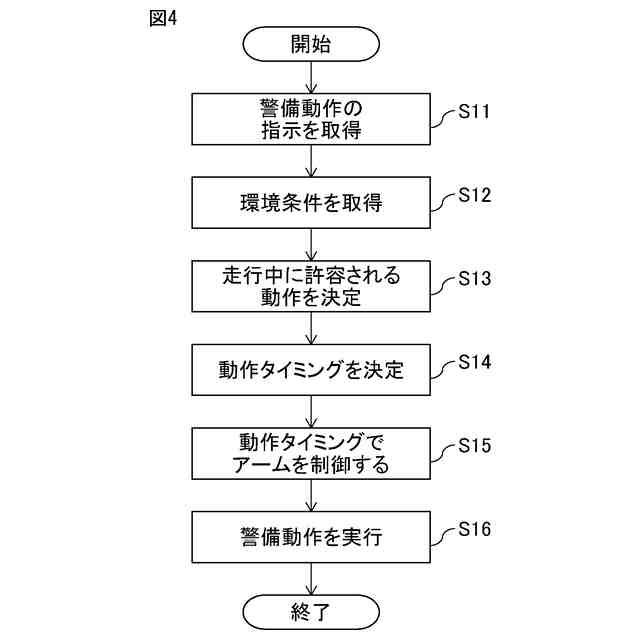
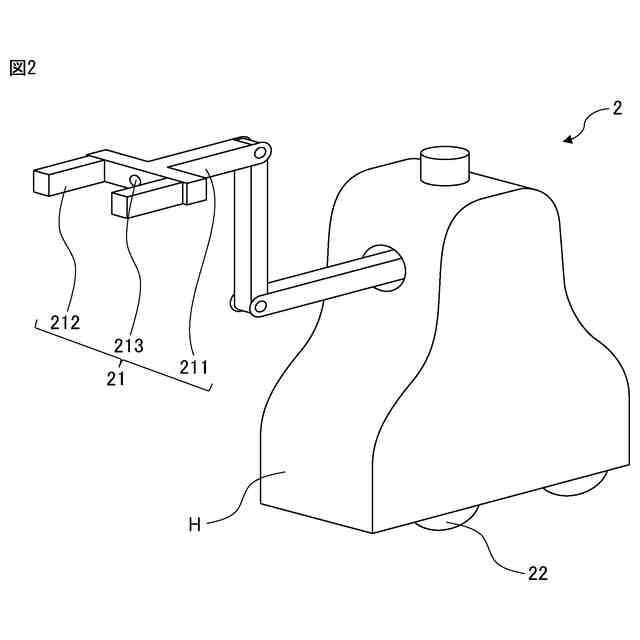
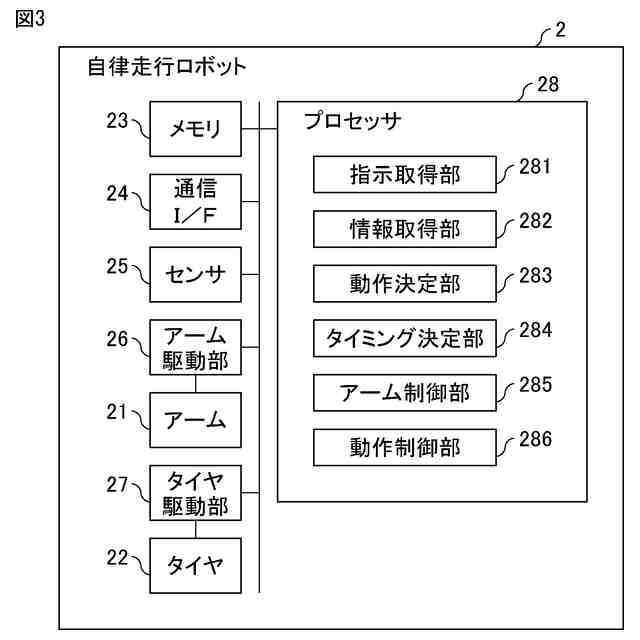
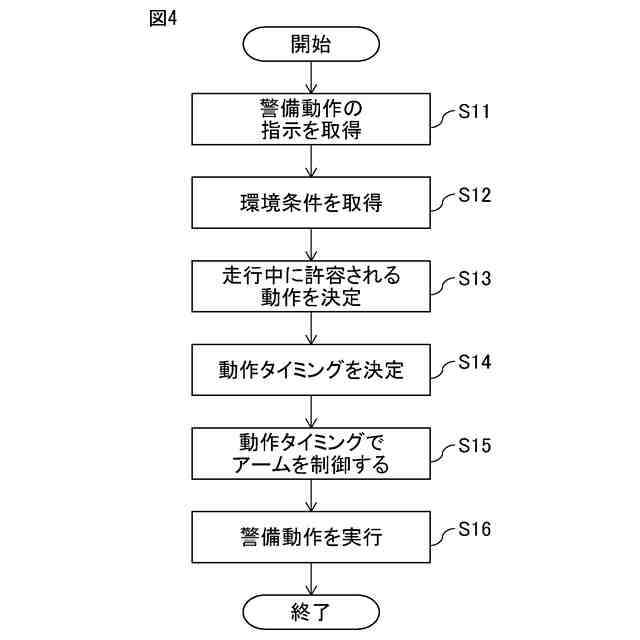
【解決手段】自律走行ロボットは、走行空間を自律して走行し、所定の警備動作を実行する自律走行ロボットであって、自律走行ロボットの本体から延伸可能であり、警備動作に用いられる可動部と、走行空間の環境に関する環境情報を取得する取得部と、環境情報に基づいて、走行中に許容される可動部の動作を決定する決定部と、決定された動作を可動部に実行させる制御部と、を有する。
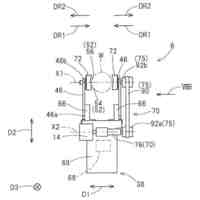
【選択図】図4
特許請求の範囲
【請求項1】
走行空間を自律して走行し、所定の警備動作を実行する自律走行ロボットであって、
前記自律走行ロボットの本体から延伸可能であり、前記警備動作に用いられる可動部と、
前記走行空間の環境に関する環境情報を取得する取得部と、
前記環境情報に基づいて、走行中に許容される前記可動部の動作を決定する決定部と、
前記決定された動作を前記可動部に実行させる制御部と、
を有する自律走行ロボット。
続きを表示(約 680 文字)
【請求項2】
前記可動部は、走行のための走行ポジションと、前記警備動作を実行するための動作ポジションとの間で遷移し、
前記決定部は、前記環境情報が前記走行空間において他の移動物体の数または混雑度が所定値未満であることを示す場合に、前記可動部が前記走行ポジションと前記動作ポジションとの間を遷移する動作を前記走行中に許容される動作に決定する、
請求項1に記載の自律走行ロボット。
【請求項3】
前記可動部は、走行のための走行ポジションと、前記警備動作を実行するための動作ポジションとの間で遷移し、
前記決定部は、前記環境情報が前記走行空間において他の移動物体の数または混雑度が所定値以上であることを示す場合に、前記可動部が前記走行ポジションと前記動作ポジションとの間を遷移する動作を前記走行中に禁止される動作に決定するとともに、前記可動部が前記動作ポジションを維持する動作を前記走行中に許容される動作に決定する、
請求項1に記載の自律走行ロボット。
【請求項4】
前記可動部は、走行のための走行ポジションと、前記警備動作を実行するための動作ポジションとの間で遷移し、
前記決定部は、前記環境情報が前記走行空間において他の移動物体の数または混雑度が所定値以上であることを示し、かつ、前記動作ポジションにある可動部の延伸方向が所定条件を満たす場合に、前記可動部が前記動作ポジションを維持する動作を前記走行中に禁止される動作に決定する、
請求項1に記載の自律走行ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行ロボットに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
施設の警備のために、自律して施設内を走行して不審物の検出、施錠の確認等の警備動作を実行するロボットが知られている。このような自律走行ロボットの中には、効率的な警備動作を実行するために、アームを有するものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-41165号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
警備動作の実行にあたってアームのポジションを遷移させる際、ロボットの周囲の人物等へ危険が及び得るため、安全性に配慮したアーム遷移を行う必要があり時間を要してしまう。そこで、アームを有する自律走行ロボットの運用において、効率的に警備動作を実行しながら、安全性に配慮することが求められる。
【0005】
本発明は、上述の課題を解決するためになされたものであり、安全に走行しながら警備動作を実行できる自律走行ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の実施形態に係る自律走行ロボットは、走行空間を自律して走行し、所定の警備動作を実行する自律走行ロボットであって、自律走行ロボットの本体から延伸可能であり、警備動作に用いられる可動部と、走行空間の環境に関する環境情報を取得する取得部と、環境情報に基づいて、走行中に許容される可動部の動作を決定する決定部と、決定された動作を可動部に実行させる制御部と、を有する。
【0007】
また、可動部は、走行のための走行ポジションと、警備動作を実行するための動作ポジションとの間で遷移し、決定部は、環境情報が走行空間において他の移動物体の数または混雑度が所定値未満であることを示す場合に、可動部が走行ポジションと動作ポジションとの間を遷移する動作を走行中に許容される動作に決定することが好ましい。
【0008】
また、可動部は、走行のための走行ポジションと、警備動作を実行するための動作ポジションとの間で遷移し、決定部は、環境情報が走行空間において他の移動物体の数または混雑度が所定値以上であることを示す場合に、可動部が走行ポジションと動作ポジションとの間を遷移する動作を走行中に禁止される動作に決定するとともに、可動部が動作ポジションを維持する動作を走行中に許容される動作に決定することが好ましい。
【0009】
また、可動部は、走行のための走行ポジションと、警備動作を実行するための動作ポジションとの間で遷移し、決定部は、環境情報が走行空間において他の移動物体の数または混雑度が所定値以上であることを示し、かつ、動作ポジションにある可動部の延伸方向が所定条件を満たす場合に、可動部が動作ポジションを維持する動作を走行中に禁止される動作に決定することが好ましい。
【発明の効果】
【0010】
本発明に係る自律走行ロボットは、安全に走行しながら警備動作を実行できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
21日前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
3日前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
3日前
個人
フラワーホッチキス。
17日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
29日前
株式会社竹中工務店
補助セット
29日前
川崎重工業株式会社
ハンド
21日前
株式会社マキタ
ハンマドリル
4日前
株式会社マキタ
ハンマドリル
4日前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
24日前
工機ホールディングス株式会社
作業機
21日前
本田技研工業株式会社
装置
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
川崎重工業株式会社
塗装システム
21日前
株式会社安川電機
ロボット
1日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
24日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
トヨタ自動車株式会社
ロボットハンド
1日前
ライオン株式会社
移載システム
1か月前
工機ホールディングス株式会社
作業機
21日前
アネックスツール株式会社
ドライバービット
28日前
株式会社不二越
ロボットに用いる伝送路
14日前
株式会社マキタ
回転打撃工具
24日前
川崎重工業株式会社
ワーク搬送ロボット
21日前
ワールド技研株式会社
ロボットセル装置
29日前
株式会社マキタ
現場用作業機
10日前
トヨタ自動車株式会社
ロボットの制御装置
28日前
NTN株式会社
ハンド
1か月前
山九株式会社
レンチ保持治具
24日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
セイコーエプソン株式会社
ロボット
28日前
株式会社マキタ
電動工具
1か月前
NTN株式会社
把持装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ