TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117161
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011879
出願日
2024-01-30
発明の名称
電動機、及び電動圧縮機
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
H02P
21/28 20160101AFI20250804BHJP(電力の発電,変換,配電)
要約
【課題】精度良く回転子の位置を推定することができる電動機、及び電動圧縮機を提供すること。
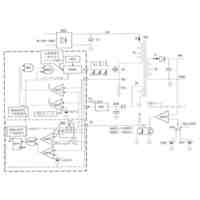
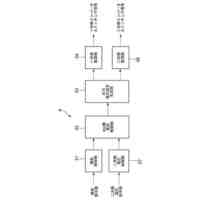
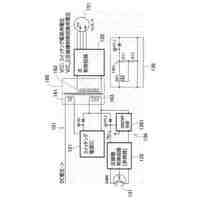
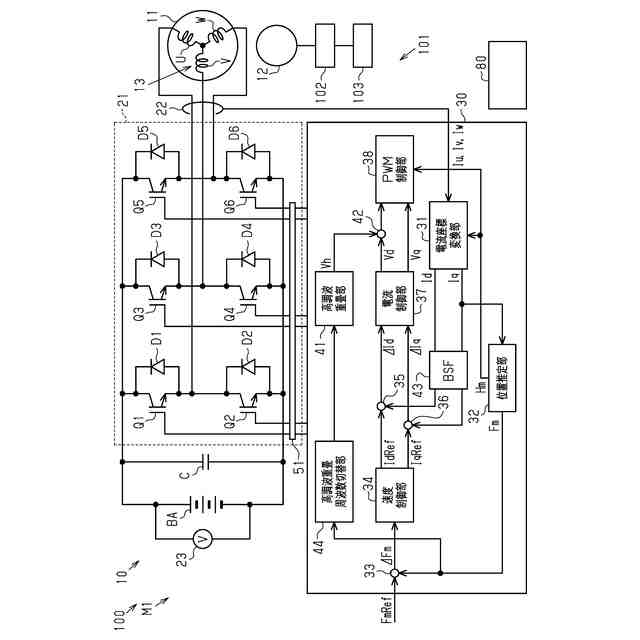
【解決手段】制御部30は、位置推定部32と、高調波重畳部41と、高調波重畳周波数切替部44とを備える。位置推定部32は、3相のコイルに発生する誘起電圧に基づき、回転子12の位置を推定する、又は指令値に重畳させた高調波に基づく高調波重畳方式によって回転子12の位置を推定する。高調波重畳部41は、高調波重畳周波数切替部44によって切り替えられた高調波を指令値に重畳させる。高調波重畳周波数切替部44は、高調波周波数と、モータ11の6n次(nは正の整数)の高調波ノイズ成分におけるノイズ周波数とが合致しないように、高調波周波数を切り替える。
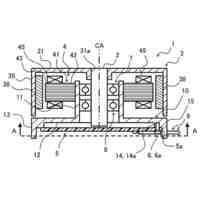
【選択図】図1
特許請求の範囲
【請求項1】
回転子、及び3相のコイルが巻回された固定子を有するモータと、
ドライバーと、前記ドライバーによって駆動されるスイッチング素子とを有し、前記スイッチング素子によって前記モータを駆動するインバータと、
前記スイッチング素子の制御に用いられる複数の指令値を算出し、前記スイッチング素子を制御する制御部と、を備える電動機であって、
前記制御部は、
前記指令値に重畳させた高調波に基づく高調波重畳方式によって前記回転子の位置を推定する位置推定部と、
前記位置推定部の推定結果に基づいて、前記高調波の高調波周波数を切り替える高調波重畳周波数切替部と、
前記高調波重畳周波数切替部によって前記高調波周波数を切り替えられた前記高調波を前記指令値に重畳させる高調波重畳部とを有し、
前記高調波重畳周波数切替部は、前記推定結果に基づいて、前記高調波周波数と、前記モータの6n次(nは正の整数)の高調波ノイズ成分におけるノイズ周波数とが合致しないように、前記高調波周波数を切り替える、
電動機。
続きを表示(約 1,800 文字)
【請求項2】
前記高調波重畳周波数切替部は、前記推定結果に基づく前記回転子の回転数が、前記6n次の高調波ノイズ成分に基づく切替閾値と一致した場合、前記指令値に重畳していた前記高調波である第1高調波を、前記第1高調波とは周波数が異なる第2高調波に切り替える、
請求項1に記載の電動機。
【請求項3】
前記高調波重畳部は、
前記第1高調波を前記指令値に重畳させる第1高調波重畳部と、
前記第1高調波よりも周波数が低い前記第2高調波を前記指令値に重畳させる第2高調波重畳部と、を有し、
前記位置推定部は、
前記第1高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第1位置推定部と、
前記第2高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第2位置推定部と、を有し、
前記制御部は、
前記第1位置推定部が推定した推定結果と、前記第2位置推定部が推定した推定結果とのうち、前記高調波重畳周波数切替部に出力する推定結果を切り替える推定結果切替部を有し、
前記高調波重畳周波数切替部は、前記回転数の経時変化が増加している場合、前記推定結果切替部によって出力された前記推定結果に基づく前記回転数が、前記切替閾値よりも所定値だけ小さい切替演算開始閾値と一致した場合、前記指令値に前記第1高調波、及び前記第2高調波を何れも重畳するように切り替え、前記回転数が前記切替閾値と一致した場合、前記指令値に前記第2高調波のみを重畳するように切り替え、
前記推定結果切替部は、前記回転数の経時変化が増加している場合、前記指令値に前記第1高調波のみが重畳されている間、及び前記指令値に前記第1高調波、及び前記第2高調波が何れも重畳されている間は、前記第1位置推定部の推定結果を前記高調波重畳周波数切替部に出力しつつ、前記指令値に前記第2高調波のみが重畳されている間は、前記第2位置推定部の推定結果を前記高調波重畳周波数切替部に出力する、
請求項2に記載の電動機。
【請求項4】
前記高調波重畳周波数切替部は、前記推定結果に基づく前記回転子の回転数が、前記6n次の高調波ノイズ成分に基づく切替閾値と一致した場合、前記指令値に重畳していた前記高調波である第2高調波を、前記第2高調波とは周波数が異なる第1高調波に切り替える、
請求項1に記載の電動機。
【請求項5】
前記高調波重畳部は、
前記第1高調波を前記指令値に重畳させる第1高調波重畳部と、
前記第1高調波よりも周波数が低い前記第2高調波を前記指令値に重畳させる第2高調波重畳部と、を有し、
前記位置推定部は、
前記第1高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第1位置推定部と、前記第2高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第2位置推定部と、を有し、
前記制御部は、
前記第1位置推定部が推定した推定結果と、前記第2位置推定部が推定した推定結果とのうち、前記高調波重畳周波数切替部に出力する推定結果を切り替える推定結果切替部を有し、
前記高調波重畳周波数切替部は、前記回転数の経時変化が減少している場合、前記推定結果切替部によって出力された前記推定結果に基づく前記回転数が、前記切替閾値よりも所定値だけ大きい切替演算開始閾値と一致した場合、前記指令値に前記第1高調波、及び前記第2高調波を何れも重畳するように切り替え、前記回転数が前記切替閾値と一致した場合、前記指令値に前記第1高調波のみを重畳するように切り替え、
前記推定結果切替部は、前記回転数の経時変化が減少している場合、前記指令値に前記第2高調波のみが重畳されている間、及び前記指令値に前記第1高調波、及び前記第2高調波が何れも重畳されている間は、前記第2位置推定部の推定結果を前記高調波重畳周波数切替部に出力しつつ、前記指令値に前記第1高調波のみが重畳されている間は、前記第1位置推定部の推定結果を前記高調波重畳周波数切替部に出力する、
請求項4に記載の電動機。
【請求項6】
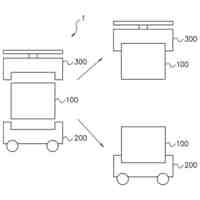
流体を圧縮する圧縮部と、
前記圧縮部を駆動させる請求項3、又は請求項5に記載の電動機と、
を備える電動圧縮機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動機、及び電動圧縮機に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
インバータをセンサレス制御することによってモータを駆動する場合、モータの回転子の位置を推定する必要がある。センサレス制御は、回転子の位置をソフトウェアで推定することによってハードウェアの位置センサを用いずにモータを駆動する制御方式である。従来、回転子の位置を推定する方式としては、例えば、誘起電圧方式、及び高調波重畳方式が知られている。誘起電圧方式は、モータの駆動によって発生する誘起電圧を用いることで回転子の位置を推定している。特許文献1に記載の高調波重畳方式は、モータへの電圧指令値又は電流指令値に高調波成分を重畳させることで回転子の位置を推定している。
【先行技術文献】
【特許文献】
【0003】
特開2011-172324号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
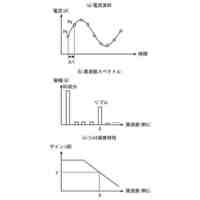
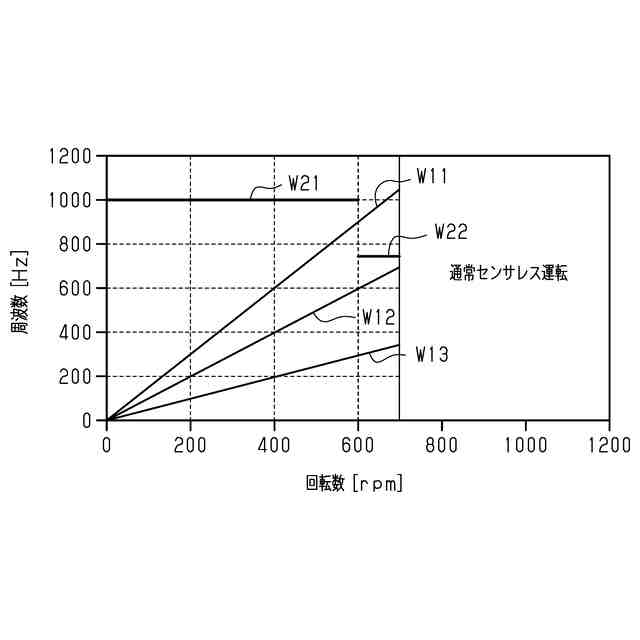
ところで、モータには、トルクリプル等に起因するモータノイズが生じる場合がある。このモータノイズと、モータへの電圧指令値、又は電流指令値に重畳させた高調波成分とが合致する場合、回転子の位置を推定することが困難である場合があった。特許文献1に開示の方法では、モータノイズと、モータへの電圧指令値、又は電流指令値に重畳させた高調波成分とが合致する場合において、精度良く回転子の位置を推定することが困難であった。
【課題を解決するための手段】
【0005】
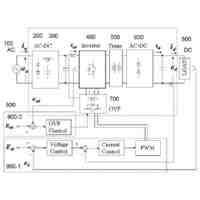
上記目的を達成する電動機は、回転子、及び3相のコイルが巻回された固定子を有するモータと、ドライバーと、前記ドライバーによって駆動されるスイッチング素子とを有し、前記スイッチング素子によって前記モータを駆動するインバータと、前記スイッチング素子の制御に用いられる複数の指令値を算出し、前記スイッチング素子を制御する制御部と、を備える電動機であって、前記制御部は、前記指令値に重畳させた高調波に基づく高調波重畳方式によって前記回転子の位置を推定する位置推定部と、前記位置推定部の推定結果に基づいて、前記高調波の高調波周波数を切り替える高調波重畳周波数切替部と、前記高調波重畳周波数切替部によって前記高調波周波数を切り替えられた前記高調波を前記指令値に重畳させる高調波重畳部とを有し、前記高調波重畳周波数切替部は、前記推定結果に基づいて、前記高調波周波数と、前記モータの6n次(nは正の整数)の高調波ノイズ成分におけるノイズ周波数とが合致しないように、前記高調波周波数を切り替える、ことを特徴とする。
【0006】
かかる構成によれば、精度良く回転子の位置を推定することができる。
上記目的を達成する電動機において、前記高調波重畳周波数切替部は、前記推定結果に基づく前記回転子の回転数が、前記6n次の高調波ノイズ成分に基づく切替閾値と一致した場合、前記指令値に重畳していた前記高調波である第1高調波を、前記第1高調波とは周波数が異なる第2高調波に切り替えてもよい。
【0007】
かかる構成によれば、高調波の周波数と、6n次の高調波ノイズ成分の周波数とが近くなることを抑制することができる。
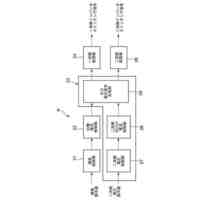
上記目的を達成する電動機において、前記高調波重畳部は、前記第1高調波を前記指令値に重畳させる第1高調波重畳部と、前記第1高調波よりも周波数が低い前記第2高調波を前記指令値に重畳させる第2高調波重畳部と、を有し、前記位置推定部は、前記第1高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第1位置推定部と、前記第2高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第2位置推定部と、を有し、前記制御部は、前記第1位置推定部が推定した推定結果と、前記第2位置推定部が推定した推定結果とのうち、前記高調波重畳周波数切替部に出力する推定結果を切り替える推定結果切替部を有し、前記高調波重畳周波数切替部は、前記回転数の経時変化が増加している場合、前記推定結果切替部によって出力された前記推定結果に基づく前記回転数が、前記切替閾値よりも所定値だけ小さい切替演算開始閾値と一致した場合、前記指令値に前記第1高調波、及び前記第2高調波を何れも重畳するように切り替え、前記回転数が前記切替閾値と一致した場合、前記指令値に前記第2高調波のみを重畳するように切り替え、前記推定結果切替部は、前記回転数の経時変化が増加している場合、前記指令値に前記第1高調波のみが重畳されている間、及び前記指令値に前記第1高調波、及び前記第2高調波が何れも重畳されている間は、前記第1位置推定部の推定結果を前記高調波重畳周波数切替部に出力しつつ、前記指令値に前記第2高調波のみが重畳されている間は、前記第2位置推定部の推定結果を前記高調波重畳周波数切替部に出力してもよい。
【0008】
かかる構成によれば、第1高調波と第2高調波の切替に伴う回転子の位置推定の精度の低下を抑制することができる。
上記目的を達成する電動機において、前記高調波重畳周波数切替部は、前記推定結果に基づく前記回転子の回転数が、前記6n次の高調波ノイズ成分に基づく切替閾値と一致した場合、前記指令値に重畳していた前記高調波である第2高調波を、前記第2高調波とは周波数が異なる第1高調波に切り替えてもよい。
【0009】
かかる構成によれば、高調波の周波数と、6n次の高調波ノイズ成分の周波数とが近くなることを抑制することができる。
上記目的を達成する電動機において、前記高調波重畳部は、前記第1高調波を前記指令値に重畳させる第1高調波重畳部と、前記第1高調波よりも周波数が低い前記第2高調波を前記指令値に重畳させる第2高調波重畳部と、を有し、前記位置推定部は、前記第1高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第1位置推定部と、前記第2高調波に基づく前記高調波重畳方式によって前記回転子の位置を推定する第2位置推定部と、を有し、前記制御部は、前記第1位置推定部が推定した推定結果と、前記第2位置推定部が推定した推定結果とのうち、前記高調波重畳周波数切替部に出力する推定結果を切り替える推定結果切替部を有し、前記高調波重畳周波数切替部は、前記回転数の経時変化が減少している場合、前記推定結果切替部によって出力された前記推定結果に基づく前記回転数が、前記切替閾値よりも所定値だけ大きい切替演算開始閾値と一致した場合、前記指令値に前記第1高調波、及び前記第2高調波を何れも重畳するように切り替え、前記回転数が前記切替閾値と一致した場合、前記指令値に前記第1高調波のみを重畳するように切り替え、前記推定結果切替部は、前記回転数の経時変化が減少している場合、前記指令値に前記第2高調波のみが重畳されている間、及び前記指令値に前記第1高調波、及び前記第2高調波が何れも重畳されている間は、前記第2位置推定部の推定結果を前記高調波重畳周波数切替部に出力しつつ、前記指令値に前記第1高調波のみが重畳されている間は、前記第1位置推定部の推定結果を前記高調波重畳周波数切替部に出力してもよい。
【0010】
かかる構成によれば、第1高調波と第2高調波の切替に伴う回転子の位置推定の精度の低下を抑制することができる。
上記目的を達成する電動圧縮機は、流体を圧縮する圧縮部と、前記圧縮部を駆動させる上述のうちいずれかに記載の電動機とを備える、ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
充電制御システム
6日前
ニデック株式会社
モータ
20日前
個人
発電装置
14日前
個人
電流制御形AC-DC電源
13日前
株式会社ナユタ
電源装置
6日前
個人
ステッピングモータ実習装置
27日前
キヤノン株式会社
電源装置
14日前
スズキ株式会社
移動システム
6日前
トヨタ自動車株式会社
充電方法
1か月前
カヤバ株式会社
モータ制御装置
9日前
サンデン株式会社
電力変換装置
21日前
サンデン株式会社
電力変換装置
21日前
トヨタ自動車株式会社
駆動装置
16日前
カヤバ株式会社
モータ制御装置
9日前
個人
回転力発生装置
12日前
ダイハツ工業株式会社
グロメット
5日前
株式会社ダイヘン
給電装置
7日前
トヨタ自動車株式会社
電池システム
19日前
ミツミ電機株式会社
電源回路
15日前
新電元工業株式会社
充電装置
1か月前
日産自動車株式会社
回転電機
16日前
ダイハツ工業株式会社
充電システム
15日前
シャープ株式会社
冷蔵庫
21日前
住友金属鉱山株式会社
遮熱装置
1か月前
株式会社デンソー
携帯機
5日前
富士電機株式会社
電力変換装置
9日前
株式会社デンソー
電源装置
22日前
株式会社日立製作所
回転電機
27日前
トヨタ自動車株式会社
電力管理システム
19日前
ミネベアミツミ株式会社
回転機器
27日前
株式会社豊田自動織機
電動圧縮機
19日前
株式会社アイシン
駆動装置
5日前
ミネベアミツミ株式会社
回転機器
27日前
ミネベアミツミ株式会社
回転機器
27日前
ミネベアミツミ株式会社
回転機器
27日前
個人
延線補助具
12日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ