TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025124354
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020347
出願日
2024-02-14
発明の名称
骨格推定装置、骨格推定方法、及びプログラム
出願人
トヨタ自動車株式会社
,
株式会社豊田自動織機
,
株式会社アイシン
,
株式会社デンソー
代理人
個人
主分類
G06T
7/00 20170101AFI20250819BHJP(計算;計数)
要約
【課題】対象物の一部が障害物の影に隠れた状態でもその対象物の骨格を精度良く推定できること。
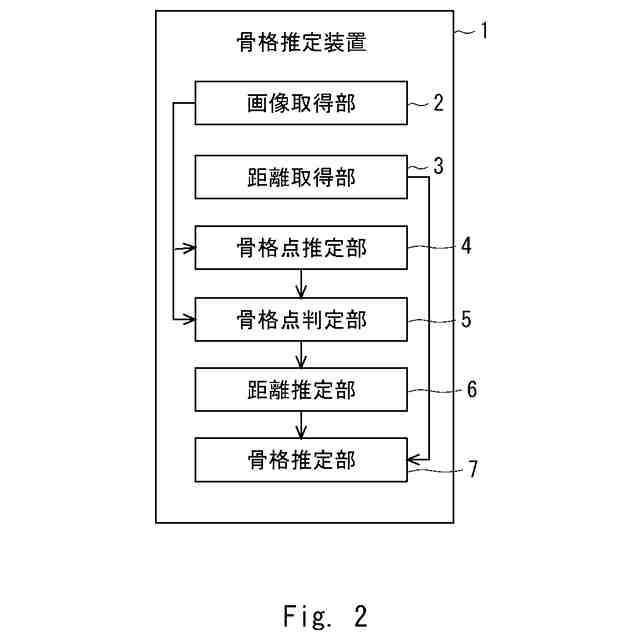
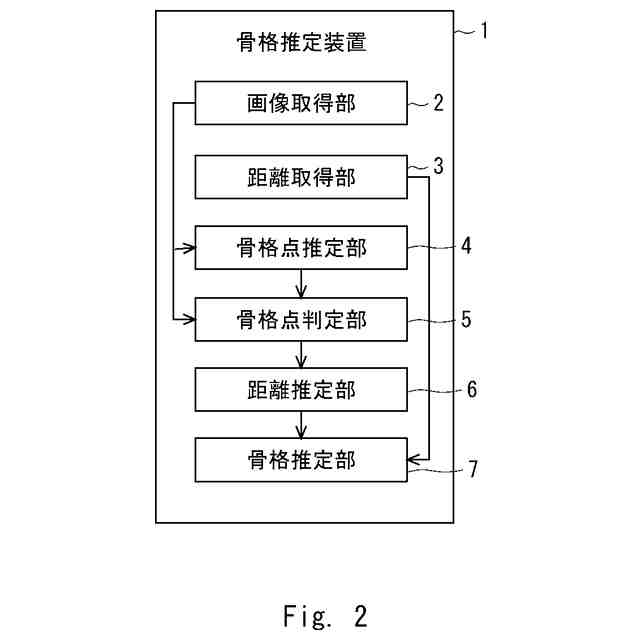
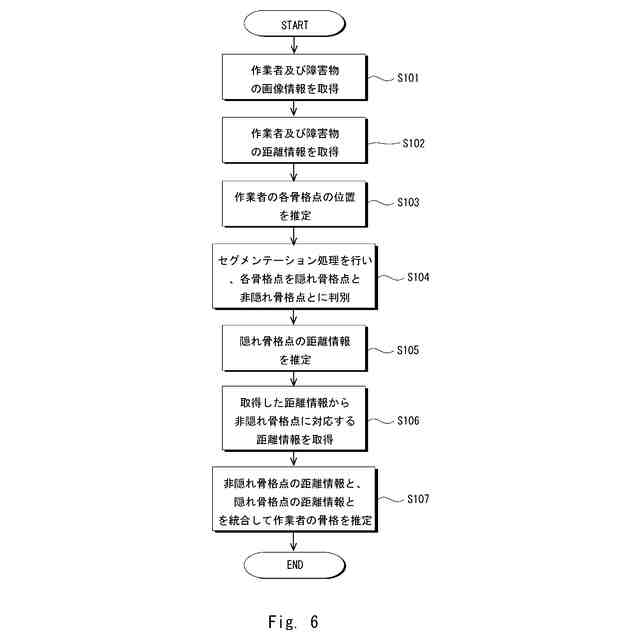
【解決手段】骨格推定装置は、対象物及び障害物を含む画像情報を取得する画像取得手段と、対象物及び障害物の距離情報を取得する距離取得手段と、対象物及び障害物の画像情報に基づいて、対象物の各骨格点の位置を推定する骨格点推定手段と、対象物及び障害物の画像情報に基づいて、推定された複数の骨格点を、障害物に隠れている隠れ骨格点と、障害物に隠れていない非隠れ骨格点と、に判別する骨格点判別手段と、判別された隠れ骨格点の距離情報を推定する距離推定手段と、取得された距離情報から、判別された非隠れ骨格点に対応する距離情報を取得し、取得した非隠れ骨格点の距離情報と、推定された隠れ骨格点の距離情報と、を統合することで、対象物の骨格を推定する骨格推定手段と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
対象物及び該対象物の少なくとも一部を隠す障害物を含む画像情報を取得する画像取得手段と、
前記対象物及び障害物の距離情報を取得する距離取得手段と、
前記画像取得手段により取得された対象物及び障害物の画像情報に基づいて、該対象物の各骨格点の位置を推定する骨格点推定手段と、
前記画像取得手段により取得された対象物及び障害物の画像情報に基づいて、前記骨格点推定手段により推定された複数の骨格点を、前記障害物に隠れている隠れ骨格点と、前記障害物に隠れていない非隠れ骨格点と、に判別する骨格点判別手段と、
前記骨格点判別手段により判別された隠れ骨格点の距離情報を推定する距離推定手段と、
前記距離取得手段に取得された距離情報から、前記骨格点判別手段により判別された非隠れ骨格点に対応する距離情報を取得し、該取得した非隠れ骨格点の距離情報と、前記距離推定手段により推定された隠れ骨格点の距離情報と、を統合することで、前記対象物の骨格を推定する骨格推定手段と、
を備える、骨格推定装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載の骨格推定装置であって、
前記骨格点判別手段は、
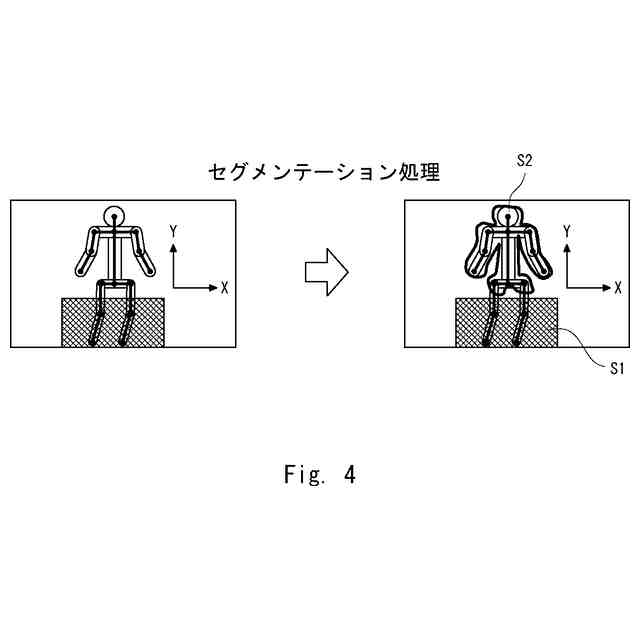
前記画像取得手段により取得された対象物及び障害物の画像情報に対し、セグメンテーション処理を行い、
前記障害物のセグメンテーションに含まれる骨格点を前記隠れ骨格点とし、前記対象物のセグメンテーションに含まれる骨格点を前記非隠れ骨格点として、判別する、
骨格手推定装置。
【請求項3】
請求項1記載の骨格推定装置であって、
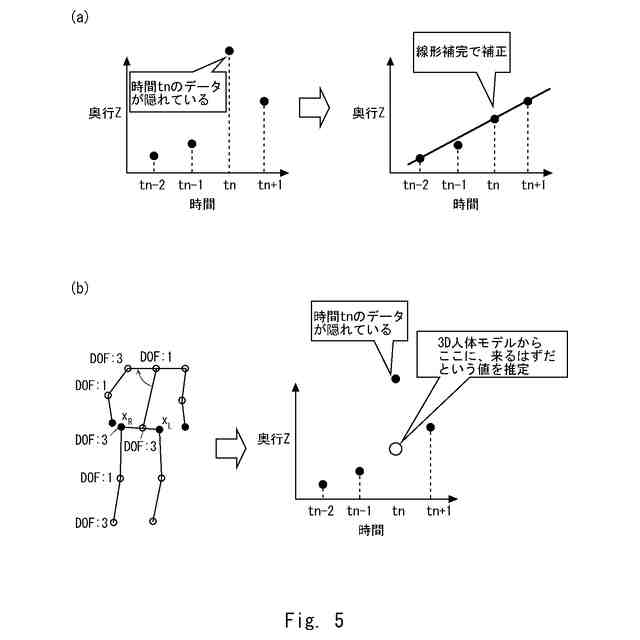
前記距離推定手段は、前記骨格点判別手段により判別された隠れ骨格点の距離情報を、線形補完処理、3次元モデル、又は、別のセンサの情報に基づいて、推定する、
骨格推定装置。
【請求項4】
対象物及び該対象物の少なくとも一部を隠す障害物を含む画像情報を取得するステップと、
前記対象物及び障害物の距離情報を取得するステップと、
前記取得された対象物及び障害物の画像情報に基づいて、該対象物の各骨格点の位置を推定するステップと、
前記取得された対象物及び障害物の画像情報に基づいて、前記推定された複数の骨格点を、前記障害物に隠れている隠れ骨格点と、前記障害物に隠れていない非隠れ骨格点と、に判別するステップと、
前記判別された隠れ骨格点の距離情報を推定するステップと、
前記取得された距離情報から、前記判別された非隠れ骨格点に対応する距離情報を取得し、該取得した非隠れ骨格点の距離情報と、前記推定された隠れ骨格点の距離情報と、を統合することで、前記対象物の骨格を推定するステップと、
を含む、骨格推定方法。
【請求項5】
対象物及び該対象物の少なくとも一部を隠す障害物を含む画像情報を取得する処理と、
前記対象物及び障害物の距離情報を取得する処理と、
前記取得された対象物及び障害物の画像情報に基づいて、該対象物の各骨格点の位置を推定する処理と、
前記取得された対象物及び障害物の画像情報に基づいて、前記推定された複数の骨格点を、前記障害物に隠れている隠れ骨格点と、前記障害物に隠れていない非隠れ骨格点と、に判別する処理と、
前記判別された隠れ骨格点の距離情報を推定する処理と、
前記取得された距離情報から、前記判別された非隠れ骨格点に対応する距離情報を取得し、該取得した非隠れ骨格点の距離情報と、前記推定された隠れ骨格点の距離情報と、を統合することで、前記対象物の骨格を推定する処理と、
をコンピュータに実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、対象物の骨格を推定する骨格推定装置、骨格推定方法、及びプログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
人の胴体が障害物の影に隠れるような場合、その人の腕や足などの骨格の位置に基づいて胴体の骨格を推定する骨格推定装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2017/187641号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記骨格推定装置は、例えば、隠れる部位が胴体の場合に、その胴体の骨格を推定できるが、腕や足が隠れてしまった場合、その腕や足の骨格を推定することができない。
【0005】
本開示は、このような問題点を解決するためになされたものであり、対象物の一部が障害物の影に隠れた状態でもその対象物の骨格を精度良く推定できる骨格推定装置、骨格推定方法、及びプログラムを提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本開示の一態様は、
対象物及び該対象物の少なくとも一部を隠す障害物を含む画像情報を取得する画像取得手段と、
前記対象物及び障害物の距離情報を取得する距離取得手段と、
前記画像取得手段により取得された対象物及び障害物の画像情報に基づいて、該対象物の各骨格点の位置を推定する骨格点推定手段と、
前記画像取得手段により取得された対象物及び障害物の画像情報に基づいて、前記骨格点推定手段により推定された複数の骨格点を、前記障害物に隠れている隠れ骨格点と、前記障害物に隠れていない非隠れ骨格点と、に判別する骨格点判別手段と、
前記骨格点判別手段により判別された隠れ骨格点の距離情報を推定する距離推定手段と、
前記距離取得手段に取得された距離情報から、前記骨格点判別手段により判別された非隠れ骨格点に対応する距離情報を取得し、該取得した非隠れ骨格点の距離情報と、前記距離推定手段により推定された隠れ骨格点の距離情報と、を統合することで、前記対象物の骨格を推定する骨格推定手段と、
を備える、骨格推定装置
である。
この一態様において、
前記骨格点判別手段は、
前記画像取得手段により取得された対象物及び障害物の画像情報に対し、セグメンテーション処理を行い、
前記障害物のセグメンテーションに含まれる骨格点を前記隠れ骨格点とし、前記対象物のセグメンテーションに含まれる骨格点を前記非隠れ骨格点として、判別してもよい。
この一態様において、
前記距離推定手段は、前記骨格点判別手段により判別された隠れ骨格点の距離情報を、線形補完処理、3次元モデル、又は、別のセンサの情報に基づいて、推定してもよい。
この一態様において、
前記対象物は作業を行う作業者であり、
前記骨格推定手段は、前記作業者の骨格を推定してもよい。
上記目的を達成するための本開示の一態様は、
対象物及び該対象物の少なくとも一部を隠す障害物を含む画像情報を取得するステップと、
前記対象物及び障害物の距離情報を取得するステップと、
前記取得された対象物及び障害物の画像情報に基づいて、該対象物の各骨格点の位置を推定するステップと、
前記取得された対象物及び障害物の画像情報に基づいて、前記推定された複数の骨格点を、前記障害物に隠れている隠れ骨格点と、前記障害物に隠れていない非隠れ骨格点と、に判別するステップと、
前記判別された隠れ骨格点の距離情報を推定するステップと、
前記取得された距離情報から、前記判別された非隠れ骨格点に対応する距離情報を取得し、該取得した非隠れ骨格点の距離情報と、前記推定された隠れ骨格点の距離情報と、を統合することで、前記対象物の骨格を推定するステップと、
を含む、骨格推定方法
である。
上記目的を達成するための本開示の一態様は、
対象物及び該対象物の少なくとも一部を隠す障害物を含む画像情報を取得する処理と、
前記対象物及び障害物の距離情報を取得する処理と、
前記取得された対象物及び障害物の画像情報に基づいて、該対象物の各骨格点の位置を推定する処理と、
前記取得された対象物及び障害物の画像情報に基づいて、前記推定された複数の骨格点を、前記障害物に隠れている隠れ骨格点と、前記障害物に隠れていない非隠れ骨格点と、に判別する処理と、
前記判別された隠れ骨格点の距離情報を推定する処理と、
前記取得された距離情報から、前記判別された非隠れ骨格点に対応する距離情報を取得し、該取得した非隠れ骨格点の距離情報と、前記推定された隠れ骨格点の距離情報と、を統合することで、前記対象物の骨格を推定する処理と、
をコンピュータに実行させる、プログラム
である。
【発明の効果】
【0007】
本開示によれば、対象物の一部が障害物の影に隠れた状態でもその対象物の骨格を精度良く推定できる骨格推定装置、骨格推定方法、及びプログラムを提供することを主たる目的とする。
【図面の簡単な説明】
【0008】
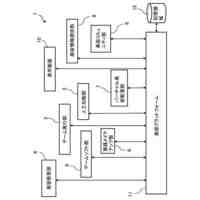
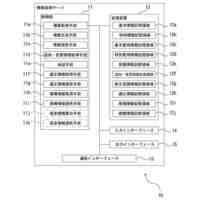
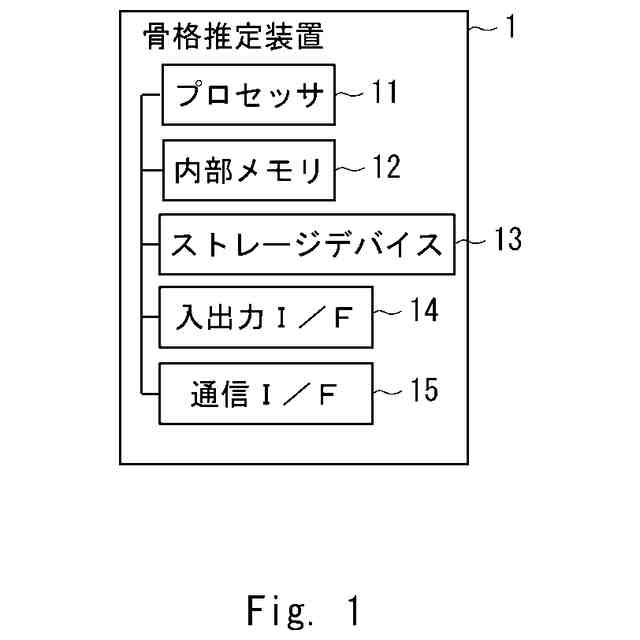
本実施形態に係る骨格推定装置の概略的なハードウェア構成を示すブロック図である。
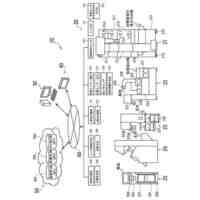
本実施形態に係る骨格推定装置の概略的なシステム構成を示すブロック図である。
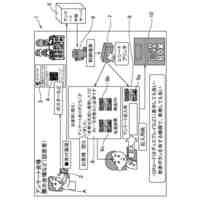
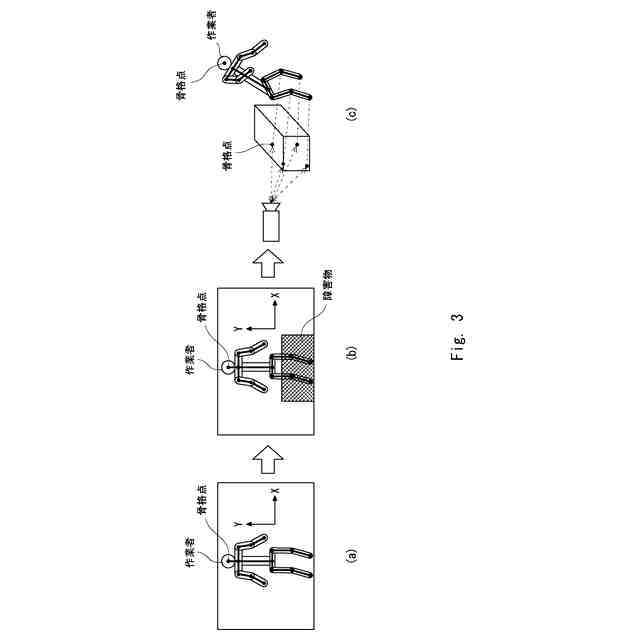
作業者の各骨格点の位置の推定方法の一例を示す図である。
セグメンテーション処理の一例を示す図である。
隠れ骨格点の距離情報の推定方法の一例を示す図である。
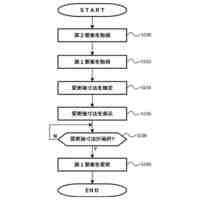
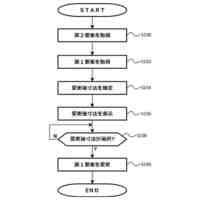
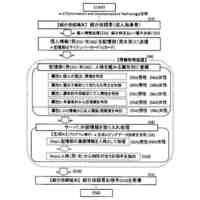
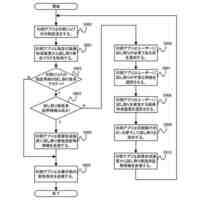
本実施形態に係る骨格推定方法のフローを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照して本実施形態について説明する。図1は、本実施形態に係る骨格推定装置の概略的なハードウェア構成を示すブロック図である。本実施形態に係る骨格推定装置1は、対象物の一部が障害物の影に隠れた状態でも、その対象物の骨格を精度良く推定することができる。
【0010】
対象物は、例えば、作業を行う作業者、スポーツを行うスポーツ選手、などの人や動物を含む。以下、対象物が作業者である場合の例について説明する。骨格推定装置1は、例えば、作業者の脚部が台車などの影に隠れた状態でも、その影に隠れた脚部を含む作業者全体の骨格を精度良く推定することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
裁判のAI化
1か月前
個人
フラワーコートA
25日前
個人
情報処理システム
1か月前
個人
工程設計支援装置
17日前
個人
介護情報提供システム
1か月前
個人
設計支援システム
1か月前
個人
携帯情報端末装置
18日前
個人
設計支援システム
1か月前
個人
結婚相手紹介支援システム
14日前
株式会社サタケ
籾摺・調製設備
1か月前
株式会社カクシン
支援装置
1か月前
個人
備蓄品の管理方法
1か月前
個人
アンケート支援システム
27日前
個人
パスポートレス入出国システム
3日前
株式会社アジラ
進入判定装置
3日前
個人
ジェスチャーパッドのガイド部材
1か月前
大阪瓦斯株式会社
住宅設備機器
11日前
サクサ株式会社
中継装置
28日前
個人
食事受注会計処理システム
4日前
株式会社村田製作所
ラック
13日前
株式会社やよい
美容支援システム
7日前
アスエネ株式会社
排水量管理方法
1か月前
個人
リテールレボリューションAIタグ
24日前
株式会社アジラ
移動方向推定装置
26日前
株式会社寺岡精工
システム
1か月前
株式会社ゼロワン
ケア支援システム
17日前
株式会社ゼロワン
ケア支援システム
17日前
株式会社アザース
企業連携システム
1か月前
飛鳥興産株式会社
物品買取システム
20日前
日本電気株式会社
システム及び方法
1か月前
キヤノン株式会社
画像形成システム
11日前
個人
入力モードにより色が変わる入力機器
3日前
株式会社東芝
ラック装置
6日前
株式会社東芝
差動伝送回路
6日前
個人
情報処理装置及びシステム
3日前
株式会社TIMEWELL
業務分解システム
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ