TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127282
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024023928
出願日
2024-02-20
発明の名称
作業機械、作業機械を含むシステム、および作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
3/42 20060101AFI20250825BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械が走行するときの作業機からの荷こぼれを回避する。
【解決手段】作業機械は、車体と、車体に取り付けられ、先端にバケットを有する、作業機と、作業機の動作を指令するコントローラとを備えている。コントローラは、バケット内の積荷質量を減少させて積荷質量が積荷質量の目標値である目標積荷質量に近づくように、バケットを動作させる。コントローラは、積荷質量を減少し終えたと判断すると、バケットをチルト方向へ動作させる。
【選択図】図14
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられ、先端にバケットを有する、作業機と、
前記作業機の動作を指令するコントローラとを備え、
前記コントローラは、前記バケット内の積荷質量を減少させて前記積荷質量が前記積荷質量の目標値である目標積荷質量に近づくように、前記バケットを動作させ、前記積荷質量を減少し終えたと判断すると、前記バケットをチルト方向へ動作させる、作業機械。
続きを表示(約 780 文字)
【請求項2】
前記コントローラは、前記バケットをフルチルト状態まで動作させる、請求項1に記載の作業機械。
【請求項3】
前記コントローラは、少なくとも2つの異なる速度で、前記バケットをチルト方向へ動作させる、請求項1または請求項2に記載の作業機械。
【請求項4】
前記コントローラは、所定のバケット姿勢に至った後の前記バケットの速度を、前記所定のバケット姿勢に至るまでの前記バケットの速度よりも小さくする、請求項3に記載の作業機械。
【請求項5】
前記コントローラは、前記バケットをダンプ方向へ動作させて前記積荷質量を減少させる、請求項1または請求項2に記載の作業機械。
【請求項6】
前記コントローラは、現在の前記積荷質量が、前記目標積荷質量によって定まる所定の閾値に至ると、前記積荷質量を減少し終えたと判断する、請求項1または請求項2に記載の作業機械。
【請求項7】
車体と、前記車体に取り付けられ、先端にバケットを有する、作業機と、を含む作業機械と、
前記作業機の動作を指令するコントローラと、を備え、
前記コントローラは、前記バケット内の積荷質量を減少させて前記積荷質量が前記積荷質量の目標値である目標積荷質量に近づくように、前記バケットを動作させ、前記積荷質量を減少し終えたと判断すると、前記バケットをチルト方向へ動作させる、作業機械を含むシステム。
【請求項8】
作業機の先端のバケット内の積荷質量を減少させて前記積荷質量が目標値である目標積荷質量に近づくように、前記バケットを動作させることと、
前記積荷質量を減少し終えたと判断すると、前記バケットをチルト方向へ動作させることと、を備える、作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械、作業機械を含むシステム、および作業機械の制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
米国特許出願公開第2017/0002542号明細書(特許文献1)には、作業ツールを振って作業ツール内の緩い材料を材料パイル上にこぼすことによって、緩い材料が材料パイルからダンプ位置への経路に沿ってこぼれないようにすると記載されている。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2017/0002542号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械から搬送機械への積み込み量を最大にするには、作業機械が搬送機械へ向かって走行するときの、作業機からの荷こぼれを回避することが求められる。
【0005】
本開示では、作業機械が走行するときの作業機からの荷こぼれを回避できる、作業機械、作業機械を含むシステム、および作業機械の制御方法が提案される。
【課題を解決するための手段】
【0006】
本開示のある局面に係る作業機械は、車体と、車体に取り付けられ、先端にバケットを有する、作業機と、作業機の動作を指令するコントローラとを備えている。コントローラは、バケット内の積荷質量を減少させて積荷質量が積荷質量の目標値である目標積荷質量に近づくように、バケットを動作させる。コントローラは、積荷質量を減少し終えたと判断すると、バケットをチルト方向へ動作させる。
【0007】
本開示のある局面に係るシステムは、作業機械を備えている。作業機械は、車体と、車体に取り付けられ、先端にバケットを有する、作業機と、を含んでいる。システムは、作業機の動作を指令するコントローラを備えている。コントローラは、バケット内の積荷質量を減少させて積荷質量が積荷質量の目標値である目標積荷質量に近づくように、バケットを動作させる。コントローラは、積荷質量を減少し終えたと判断すると、バケットをチルト方向へ動作させる。
【0008】
本開示のある局面に係る作業機械の制御方法は、以下のステップを備えている。第1のステップは、作業機の先端のバケット内の積荷質量を減少させて積荷質量が目標値である目標積荷質量に近づくように、バケットを動作させることである。第2のステップは、積荷質量を減少し終えたと判断すると、バケットをチルト方向へ動作させることである。
【発明の効果】
【0009】
本開示によると、作業機械が走行するときの作業機からの荷こぼれを回避することができる。
【図面の簡単な説明】
【0010】
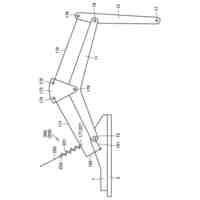
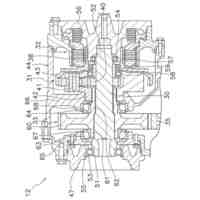
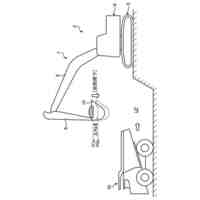
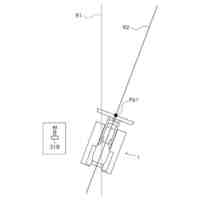
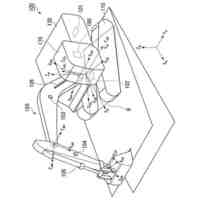
ホイールローダの側面図である。
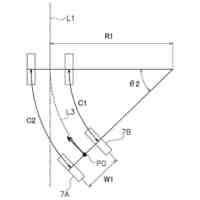
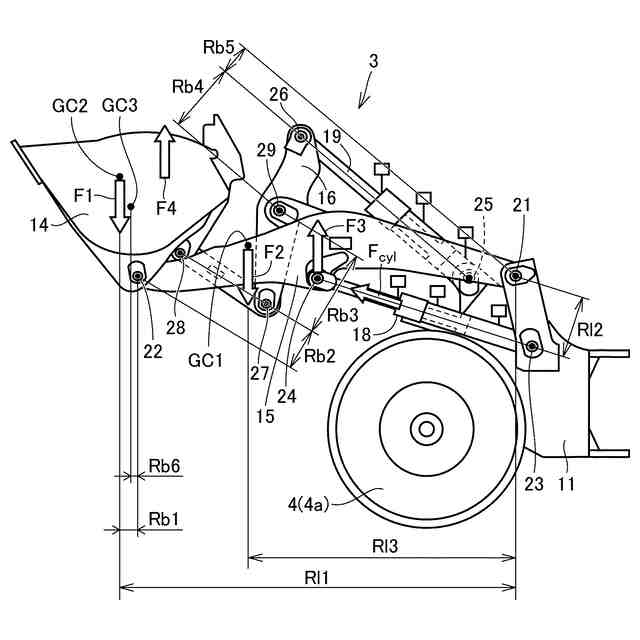
作業機の各部の寸法と、4つのモーメントのつり合いとを説明するための図である。
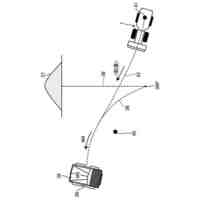
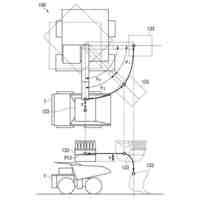
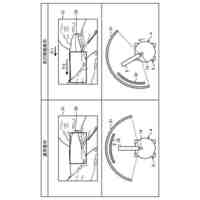
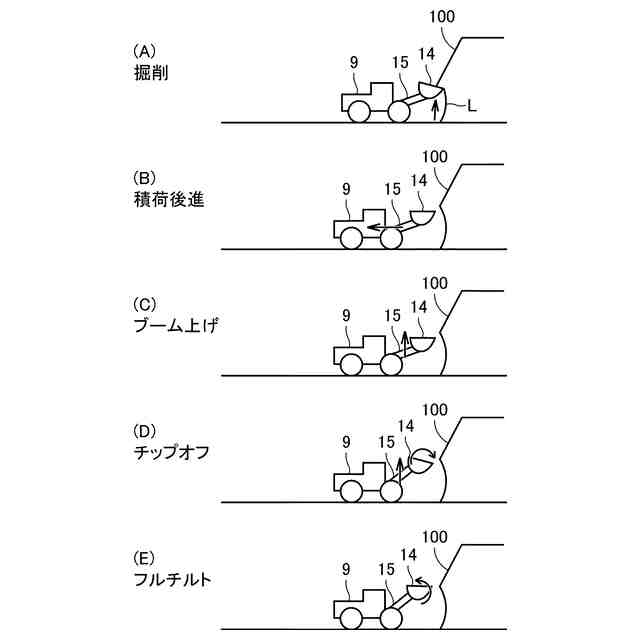
ホイールローダによる掘削作業後のチップオフを説明する模式図である。
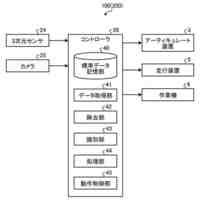
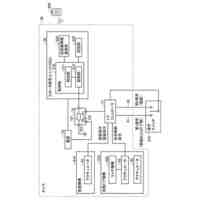
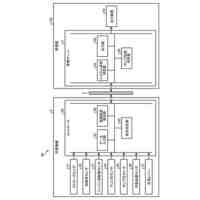
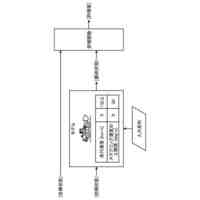
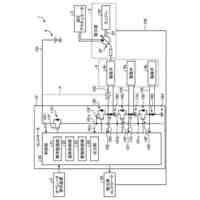
ホイールローダの機能的構成を示した機能ブロック図である。
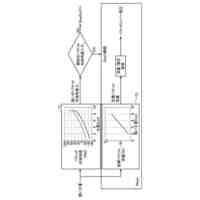
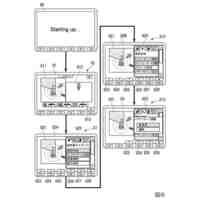
オートチップオフ制御の処理の流れを説明するためのフロー図である。
狙い土量を算出する処理の流れを示すフロー図である。
実施形態に従うオートチップオフの概要を示す模式図である。
Step1の制御における処理内容を示す模式図である。
Step2の制御における処理内容を示す模式図である。
Step2におけるバケットの速度を示すグラフである。
Step3の制御における処理内容を示す模式図である。
Step3における積荷質量の減少速度を示すグラフである。
オートチップオフ実行中のバケットの速度を示すグラフである。
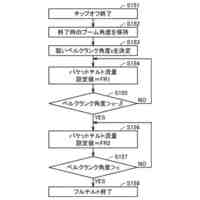
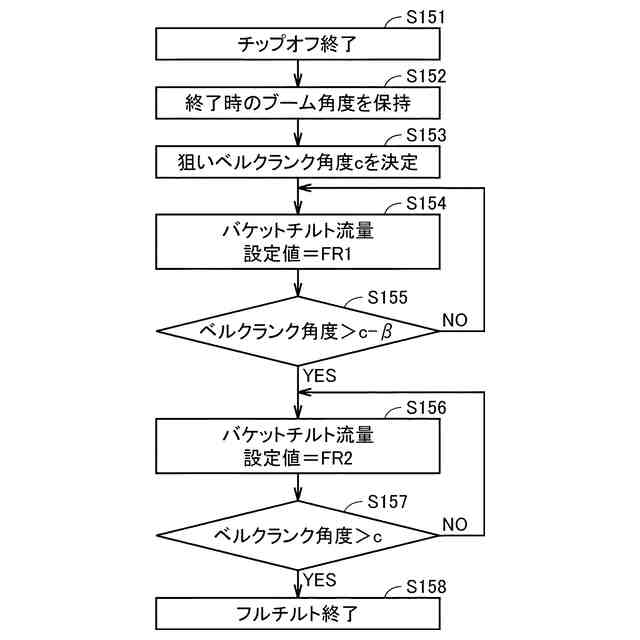
フルチルト制御の処理の流れを説明するためのフロー図である。
オートチップオフ制御の処理の流れの他の例を説明するためのフロー図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械
3日前
株式会社小松製作所
作業機械
1か月前
株式会社小松製作所
電装部品
1か月前
株式会社小松製作所
回転電機及び作業機械
23日前
株式会社小松製作所
作業機械の履帯式走行装置
1か月前
株式会社小松製作所
識別システム及び識別方法
23日前
株式会社小松製作所
ロータ、回転電機及び作業機械
28日前
株式会社小松製作所
ステータ、回転電機及び作業機械
23日前
株式会社小松製作所
作業機械、及び、トランスファ装置
8日前
株式会社小松製作所
作業機械および作業機械の制御方法
29日前
株式会社小松製作所
表示システム、表示方法及び作業機械
9日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
23日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
2日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
9日前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
24日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
17日前
株式会社小松製作所
作業機械の計測システム及び作業機械の計測方法
1か月前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
10日前
株式会社小松製作所
作業機械の制御システム及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
3日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
23日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
3日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
4日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
4日前
株式会社小松製作所
作業機械及び作業機械の制御方法
1か月前
株式会社小松製作所
積込機械の制御装置及び制御方法
1か月前
株式会社小松製作所
作業機械の遠隔操作システム、作業機械の遠隔コントローラ、及び作業機械の遠隔操作方法
4日前
株式会社小松製作所
転倒評価システム、転倒評価方法及び作業機械
8日前
株式会社小松製作所
作業機械の表示システムおよび作業機械の表示方法
29日前
個人
大都市防災設備
16日前
日立建機株式会社
作業機械
22日前
大成建設株式会社
新設構造物
21日前
個人
水底地盤の天地返し工法と専用作業船
18日前
株式会社大林組
基礎構造
18日前
日立建機株式会社
建設機械
23日前
株式会社クボタ
作業機
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ