TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126564
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022855
出願日
2024-02-19
発明の名称
作業機械および作業機械の制御方法
出願人
株式会社東洋スタビ
代理人
弁理士法人広江アソシエイツ特許事務所
主分類
E02D
3/12 20060101AFI20250822BHJP(水工;基礎;土砂の移送)
要約
【課題】作業効率を向上させることができる作業機械を提供する。
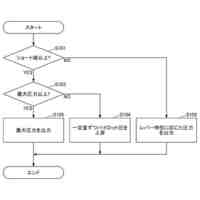
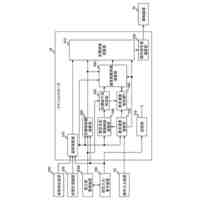
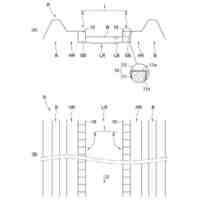
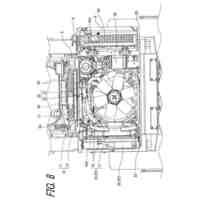
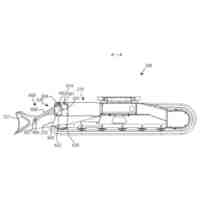
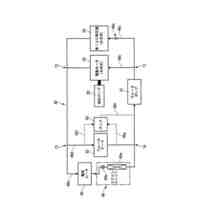
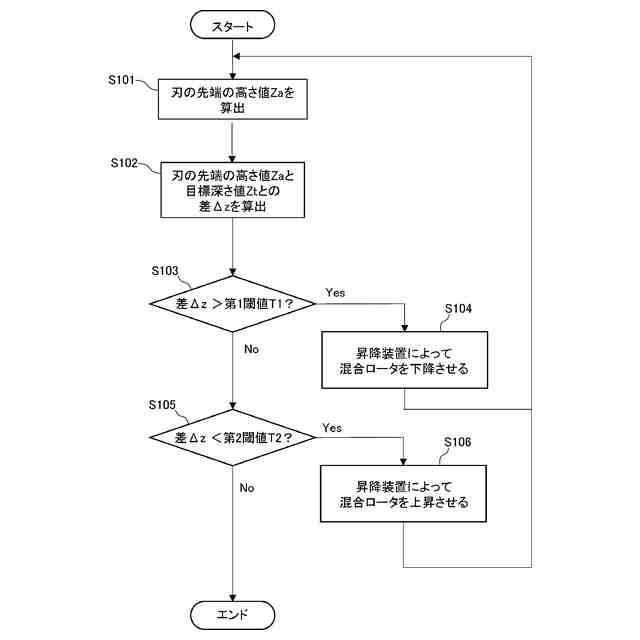
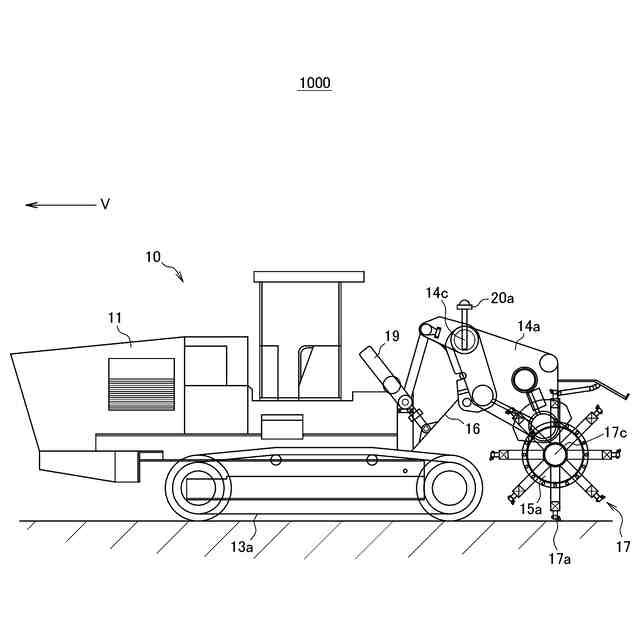
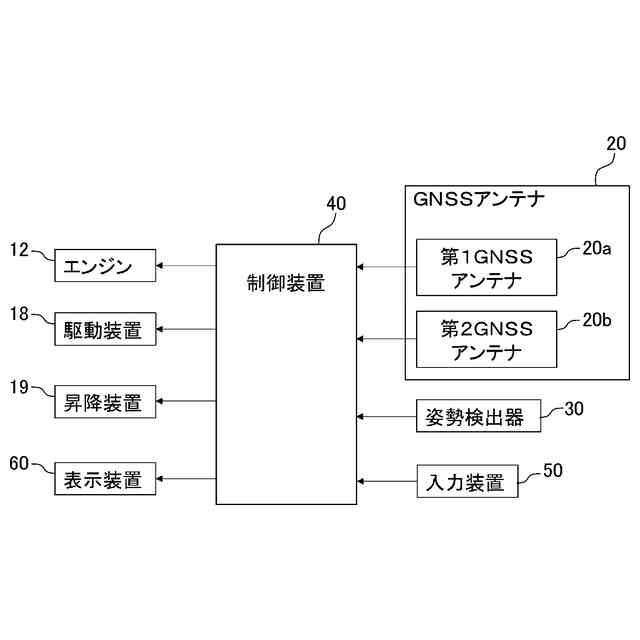
【解決手段】作業機械1000は、機械本体10と、制御装置40と、第1GNSSアンテナ20aおよび第2GNSSアンテナ20bと、姿勢検出器30と、を備える。制御装置40は、第1GNSSアンテナ20aおよび第2GNSSアンテナ20bからの機械本体10の位置情報から刃17aの先端の高さ値Zaを算出し、刃17aの先端の高さ値Zaと制御装置40に記憶された目標深さ値Ztとの差Δzを算出し、差Δzが制御装置40に設定された所定の範囲外であるか否かを判定し、差Δzが所定の範囲外であると判定した場合、差Δzが前記所定の範囲内に収まるように、昇降装置19を駆動して混合ロータ17を上下動させる。
【選択図】図6
特許請求の範囲
【請求項1】
地盤上を走行しながら土と地盤改良材とを混合する作業機械であって、
車体、前記車体に取り付けられた走行体、刃を有する混合ロータ、および前記混合ロータを上下動させる昇降装置を備える機械本体と、
制御装置と、
前記機械本体の位置情報を取得し、前記位置情報を前記制御装置に出力するGNSSアンテナと、
を備え、
前記制御装置は、
前記位置情報から前記刃の先端の高さ値Zaを算出し、
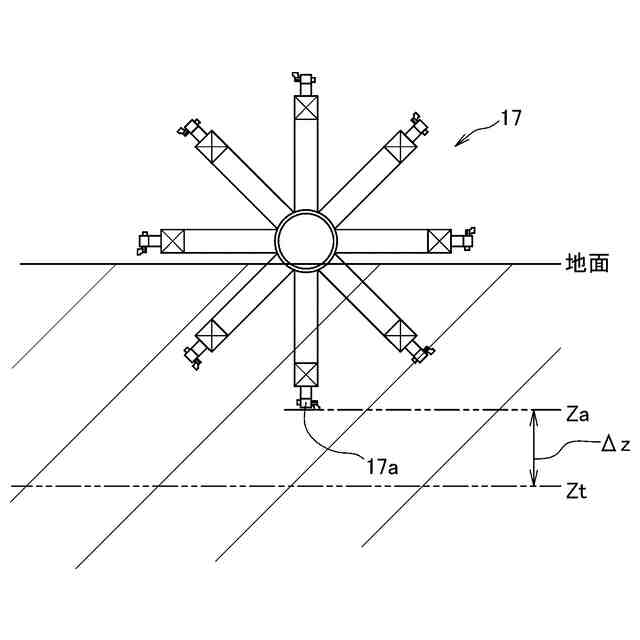
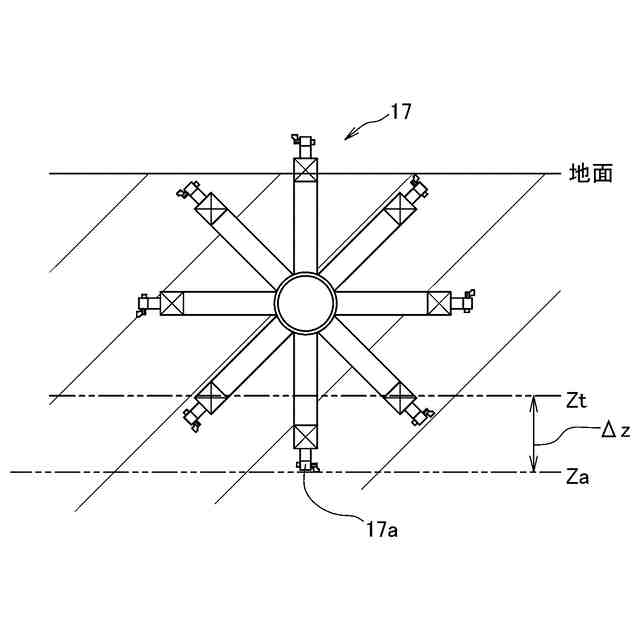
前記刃の先端の高さ値Zaと前記制御装置に記憶された目標深さ値Ztとの差Δzを算出し、
前記差Δzが前記制御装置に設定された所定の範囲外であるか否かを判定し、前記差Δzが前記所定の範囲外であると判定した場合、前記差Δzが前記所定の範囲内に収まるように、前記昇降装置を駆動して前記混合ロータを上下動させる、
作業機械。
続きを表示(約 2,000 文字)
【請求項2】
地盤上を走行しながら土と地盤改良材とを混合する作業機械であって、
車体、前記車体に取り付けられた走行体、刃を有する混合ロータ、および前記混合ロータを上下動させる昇降装置を備える機械本体と、
制御装置と、
前記機械本体の位置情報を取得し、前記位置情報を前記制御装置に出力するGNSSアンテナと、
を備え、
前記制御装置は、
前記位置情報から前記刃の先端の高さ値Zaを算出し、
前記刃の先端の高さ値Zaが前記制御装置に設定された所定の範囲外であるか否かを判定し、前記刃の先端の高さ値Zaが前記所定の範囲外である場合、前記刃の先端の高さ値Zaが前記所定の範囲内に収まるように、前記昇降装置を駆動して前記混合ロータを上下動させる、
作業機械。
【請求項3】
前記機械本体の姿勢を検出し、前記機械本体の姿勢情報を前記制御装置に出力する姿勢検出器をさらに備え、
前記制御装置は、前記姿勢情報に基づいて、前記刃の先端の高さ値Zaを修正する、
請求項1または2に記載の作業機械。
【請求項4】
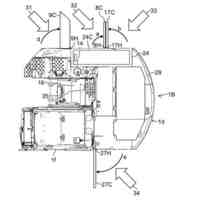
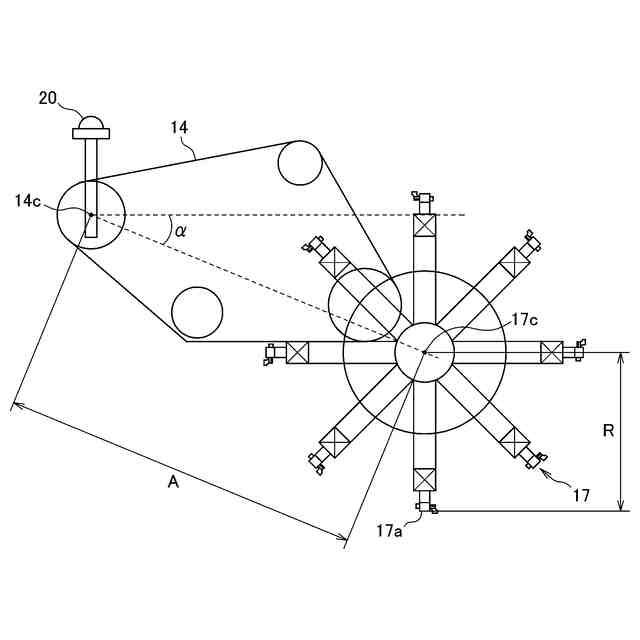
前記機械本体は、回動軸を中心に回動するとともに先端側に前記混合ロータを支持するアームを備え、
前記昇降装置は、前記アームを回動させることで前記混合ロータを上下動させるように構成され、
前記GNSSアンテナは、回動軸の高さ位置Z1を検出するように構成され、
前記刃の先端の高さ値Zaは、前記高さ位置Z1および前記前記アームの回動角度αに基づいて算出される、
請求項1または2に記載の作業機械。
【請求項5】
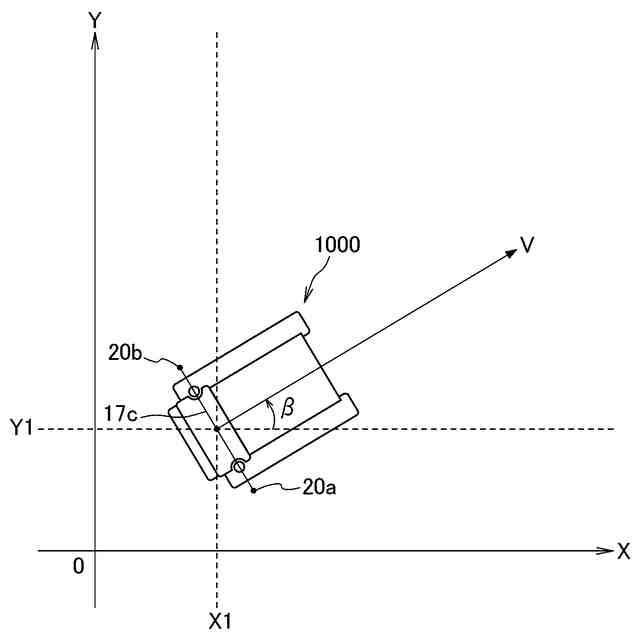
前記制御装置は、地盤改良の作業対象となる領域を、XY座標を有するXY平面に関連付けて仮想マップを作成し、前記仮想マップ上に、前記GNSSアンテナから取得した水平測位情報をXY平面上の座標(X1、Y1)に変換し、前記機械本体の進行方向の方位および前記座標(X1、Y1)に基づいて前記混合ロータの作動位置(Xa、Ya)を算出して表示する、
請求項1または2に記載の作業機械。
【請求項6】
表示装置をさらに備え、
前記制御装置は、前記GNSSアンテナからの位置情報に基づいて前記作業機械の走行軌跡を前記表示装置に出力し、
前記刃の先端の高さが前記所定の範囲内にある状態で前記混合ロータによって前記地盤の混合処理が行われたとき、前記制御装置は、所定の色で着色された前記走行軌跡を前記表示装置に出力する、
請求項1または2に記載の作業機械。
【請求項7】
地盤上を走行しながら土と地盤改良材とを混合する作業機械の制御方法であって、前記作業機械は、車体、走行体、刃を有する混合ロータ、前記混合ロータを上下動させる昇降装置および制御装置を備えており、前記制御方法は、
GNSSアンテナによって前記機械本体の位置情報を取得することと、
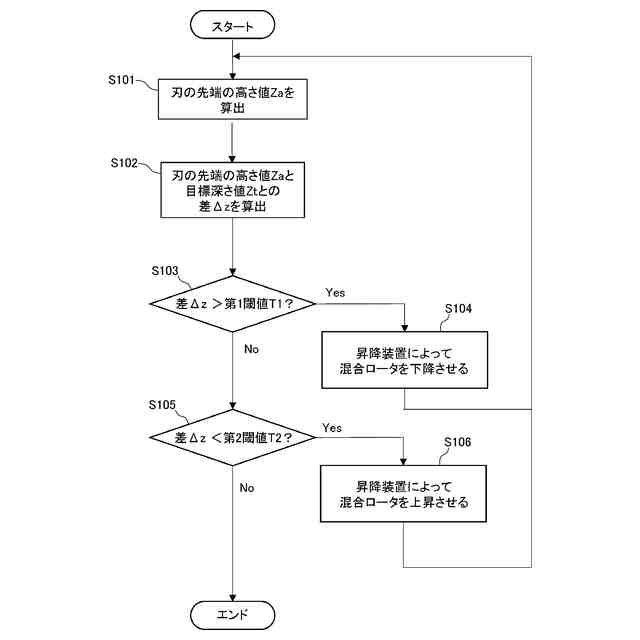
前記位置情報に基づいて前記混合ロータの刃の先端の高さ値Zaを算出することと、
前記刃の先端の高さ値Zaと目標深さ値Ztとの差Δzを算出することと、
前記差Δzが所定の範囲外か否かを判定し、前記差Δzが前記所定の範囲外である場合、前記差Δzが前記所定の範囲内に収まるように、前記昇降装置を駆動して前記混合ロータを上下動させることと、
を含む制御方法。
【請求項8】
地盤上を走行しながら土と地盤改良材とを混合する作業機械の制御方法であって、前記作業機械は、車体、走行体、刃を有する混合ロータ、前記混合ロータを上下動させる昇降装置および制御装置を備えており、前記制御方法は、
GNSSアンテナによって前記機械本体の位置情報を取得することと、
前記位置情報に基づいて前記混合ロータの刃の先端の高さ値Zaを算出することと、
前記刃の先端の高さ値Zaが所定の範囲外か否かを判定し、前記刃の先端の高さ値Zaが前記所定の範囲外である場合、前記刃の先端の高さ値Zaが前記所定の範囲内に収まるように、前記昇降装置を駆動して前記混合ロータを上下動させることと、
を含む制御方法。
【請求項9】
姿勢検出器によって前記機械本体の姿勢情報を取得し、前記姿勢情報に基づいて、前記刃の先端の高さ値Zaを修正することをさらに含む、
請求項7または8に記載の制御方法。
【請求項10】
前記刃の先端の高さが前記所定の範囲内にある状態で前記混合ロータによって前記地盤の混合処理が行われたとき、所定の色で着色された前記作業機械の走行軌跡を出力することをさらに含む、
請求項7または8に記載の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地盤改良を実施する際に使用される作業機械に関する。また、本発明は、地盤改良を実施する際に使用される作業機械の制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、地盤改良を実施する際に、地盤の土を掘り起こして土と地盤改良材とを混合する作業機械として、例えば特許文献1のスタビライザが知られている。
【先行技術文献】
【特許文献】
【0003】
特開平9-324416号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のスタビライザでは、オペレータ(ユーザ)が、土と地盤改良材とを混合する混合ロータを昇降レバーにより手動で上下動させ、地盤中の目標深さまで進入させていた。近年、オペレータの人材が不足していることから、作業の効率化が求められている。
【0005】
本発明は、作業効率を向上させることができる作業機械を提供することを目的とする。
【0006】
本発明は、作業効率を向上させることができる作業機械の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、以下に掲げる態様の発明を提供する。
(項1)
地盤上を走行しながら土と地盤改良材とを混合する作業機械であって、
車体、前記車体に取り付けられた走行体、刃を有する混合ロータ、および前記混合ロータを上下動させる昇降装置を備える機械本体と、
制御装置と、
前記機械本体の位置情報を取得し、前記位置情報を前記制御装置に出力するGNSSアンテナと、
を備え、
前記制御装置は、
前記位置情報から前記刃の先端の高さ値Zaを算出し、
前記刃の先端の高さ値Zaと前記制御装置に記憶された目標深さ値Ztとの差Δzを算出し、
前記差Δzが前記制御装置に設定された所定の範囲外であるか否かを判定し、前記差Δzが前記所定の範囲外であると判定した場合、前記差Δzが前記所定の範囲内に収まるように、前記昇降装置を駆動して前記混合ロータを上下動させる、
作業機械。
【0008】
(項2)
地盤上を走行しながら土と地盤改良材とを混合する作業機械であって、
車体、前記車体に取り付けられた走行体、刃を有する混合ロータ、および前記混合ロータを上下動させる昇降装置を備える機械本体と、
制御装置と、
前記機械本体の位置情報を取得し、前記位置情報を前記制御装置に出力するGNSSアンテナと、
を備え、
前記制御装置は、
前記位置情報から前記刃の先端の高さ値Zaを算出し、
前記刃の先端の高さ値Zaが前記制御装置に設定された所定の範囲外であるか否かを判定し、前記刃の先端の高さ値Zaが前記所定の範囲外である場合、前記刃の先端の高さ値Zaが前記所定の範囲内に収まるように、前記昇降装置を駆動して前記混合ロータを上下動させる、
作業機械。
【0009】
(項3)
前記機械本体の姿勢を検出し、前記機械本体の姿勢情報を前記制御装置に出力する姿勢検出器をさらに備え、
前記制御装置は、前記姿勢情報に基づいて、前記刃の先端の高さ値Zaを修正する、
項1または2に記載の作業機械。
【0010】
(項4)
前記機械本体は、回動軸を中心に回動するとともに先端側に前記混合ロータを支持するアームを備え、
前記昇降装置は、前記アームを回動させることで前記混合ロータを上下動させるように構成され、
前記GNSSアンテナは、回動軸の高さ位置Z1を検出するように構成され、
前記刃の先端の高さ値Zaは、前記高さ位置Z1および前記前記アームの回動角度αに基づいて算出される、
項1または2に記載の作業機械。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
大都市防災設備
11日前
個人
簡易免震構造
1か月前
日立建機株式会社
作業機械
17日前
大成建設株式会社
新設構造物
16日前
住友建機株式会社
ショベル
1か月前
個人
水底地盤の天地返し工法と専用作業船
13日前
日立建機株式会社
作業機械
1か月前
株式会社久保製作所
河川構造物
1か月前
株式会社クボタ
作業車両
1か月前
ヤンマーホールディングス株式会社
作業機械
16日前
ヤンマーホールディングス株式会社
作業機械
6日前
株式会社大林組
基礎構造
13日前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
建設機械
18日前
株式会社本久
改良地盤構築方法
24日前
株式会社クボタ
作業機
23日前
住友金属鉱山株式会社
タンク設置用基礎
6日前
株式会社地盤改良堀田
基礎杭の設置方法
10日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
9日前
日立建機株式会社
電動式建設機械
1か月前
株式会社フジタ
建築物とその施工方法
23日前
前田工繊株式会社
繊維製布団篭
27日前
株式会社山幸総建
シートパイルの土砂除去具
11日前
株式会社大林組
改良土の品質管理方法
18日前
日本精機株式会社
施工管理システム及び施工管理方法
27日前
ナブテスコ株式会社
建設機械の関節機構
1か月前
株式会社日立建機ティエラ
建設機械
10日前
アクアインテック株式会社
メーターボックスの蓋
16日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
5日前
アロン化成株式会社
排水管通気設備
11日前
日本車輌製造株式会社
建設機械の組立方法
6日前
株式会社丸和
連結金具セット、及び連結方法
1か月前
株式会社小松製作所
作業機械
1か月前
日本車輌製造株式会社
取付具
27日前
西松建設株式会社
護岸ブロック及び護岸構造物
24日前
株式会社 CUP商会
仮補強リングの使用方法
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ