TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126722
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024023109
出願日
2024-02-19
発明の名称
制御装置
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G05B
13/02 20060101AFI20250822BHJP(制御;調整)
要約
【課題】PID制御のゲイン値を自動チューニングする制御装置において、再チューニングの時期およびその実行を自動的に行うことが可能な技術を提供する。
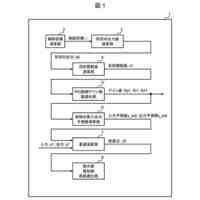
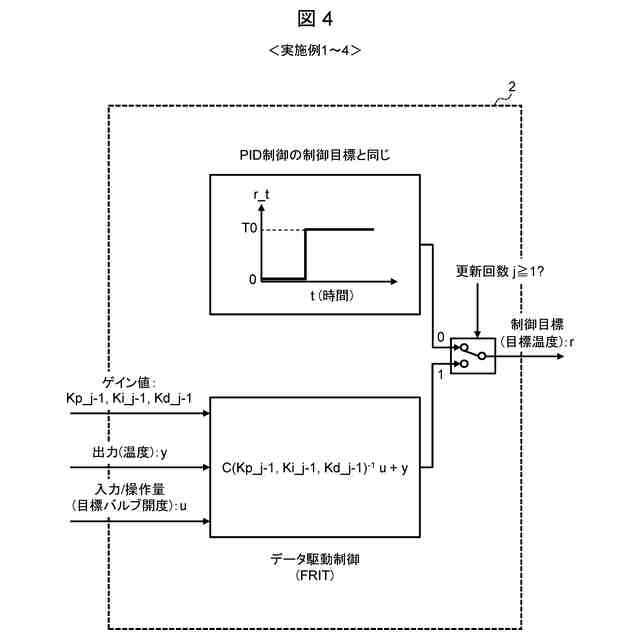
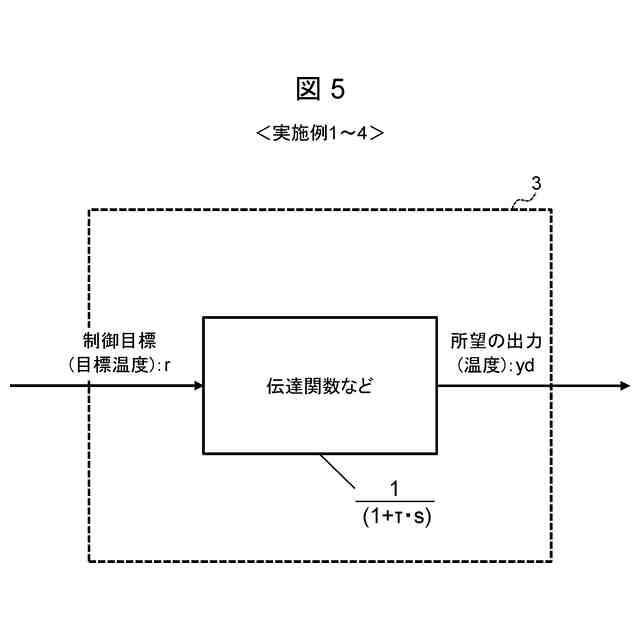
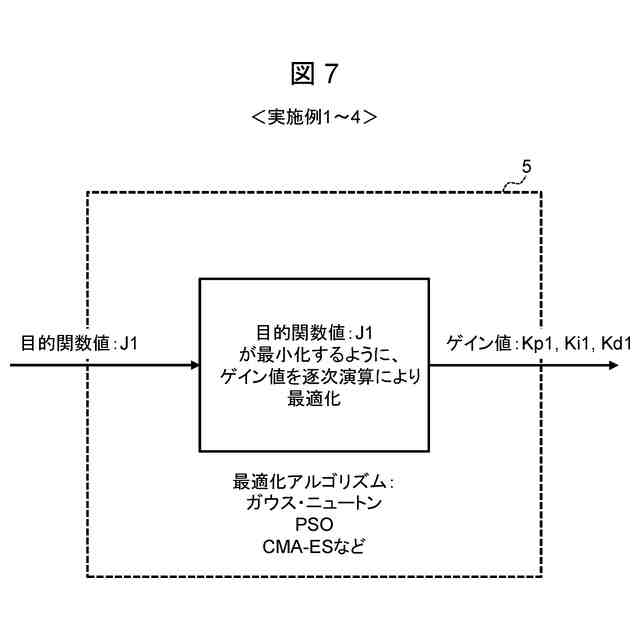
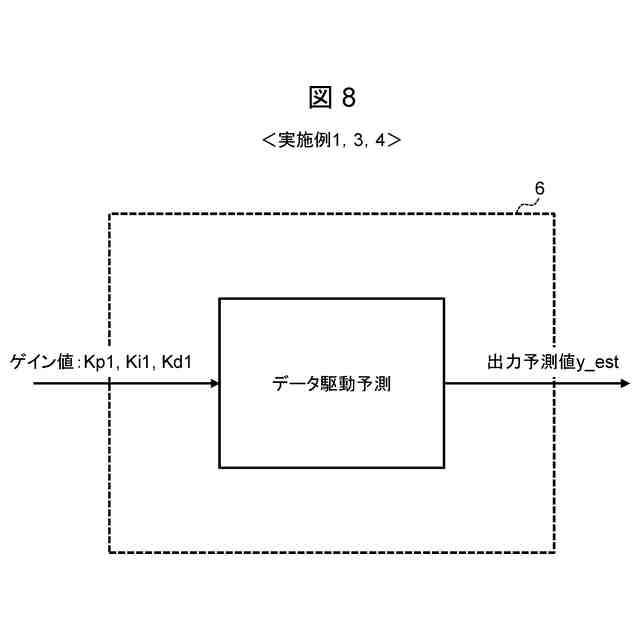
【解決手段】所望の出力プロフィールを実現するPID制御のゲイン値をデータ駆動制御FRITにより求める。FRITは、目的関数値J1を最小化するゲイン値(PSO,CMA-ESでは複数求められる)を逐次演算により求める。逐次求められる(複数組の)ゲイン値からデータ駆動予測により、当該ゲイン値を用いたときの(複数の)出力プロフィールを予測する。予測した出力プロフィール(もしくはチューニングに用いた所望の出力プロフィール)と当該ゲイン値を用いたときの出力プロフィールとの差違に基づいた値が所定値以上となったとき、制御性能が相当程度悪化したと判断し、それを報知し、適宜、再チューニングを行う。
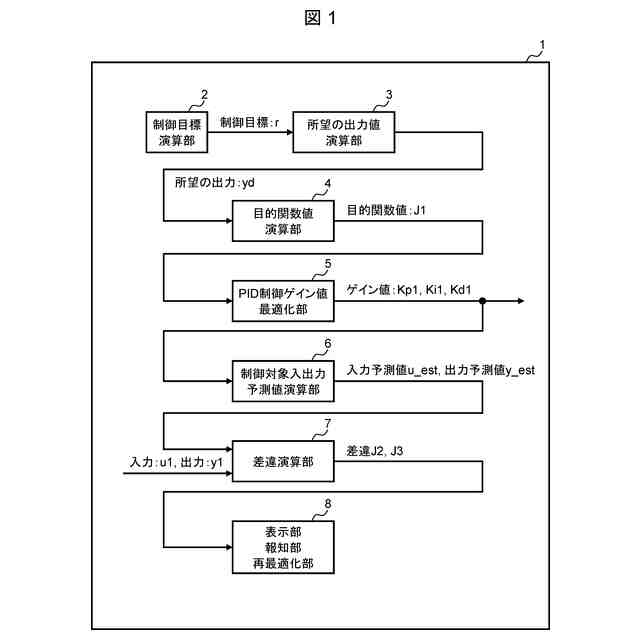
【選択図】図1
特許請求の範囲
【請求項1】
PID制御のPIDゲイン値Kp、Ki、Kdの値を自動チューニングする装置において、
制御目標rを演算する手段を備え、
制御目標rに対する制御対象の所望の出力ydを演算する手段を備え、
少なくとも、前記制御対象の実際の出力yと前記所望の出力ydとの誤差e1の二乗値に基づくJ1を演算する手段を備え、
前記J1が小さくなるように、各制御ゲイン値Kp1,Ki1,Kd1を最適化演算する手段を備え、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の出力予測値y_est
もしくは
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の入力予測値u_est
を演算する手段を備え、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の出力y1と
前記出力予測値y_estとの差e2に基づく値J2
もしくは
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の入力u1と
前記入力予測値u_estとの差e3に基づく値J3
を演算する手段を備え、
少なくとも、
前記J2もしくはJ3を表示する手段もしくは、
前記J2もしくはJ3が所定値以上のとき報知する手段もしくは、
前記制御対象の実際の出力y1と前記所望の出力ydとの誤差e4の二乗値に基づくJ4が小さくなるように、各制御ゲイン値Kp2,Ki2,Kd2を再び最適化演算する手段
を備えたことを特徴とする制御装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1において、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の出力予測値y_estは、
前記所望の出力ydもしくはデータ駆動予測で予測した出力予測値y_est'
であることを特徴とする制御装置。
【請求項3】
請求項1において、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の入力予測値u_estは、
データ駆動予測で予測した入力予測値u_est'
であることを特徴とする制御装置。
【請求項4】
請求項1において、
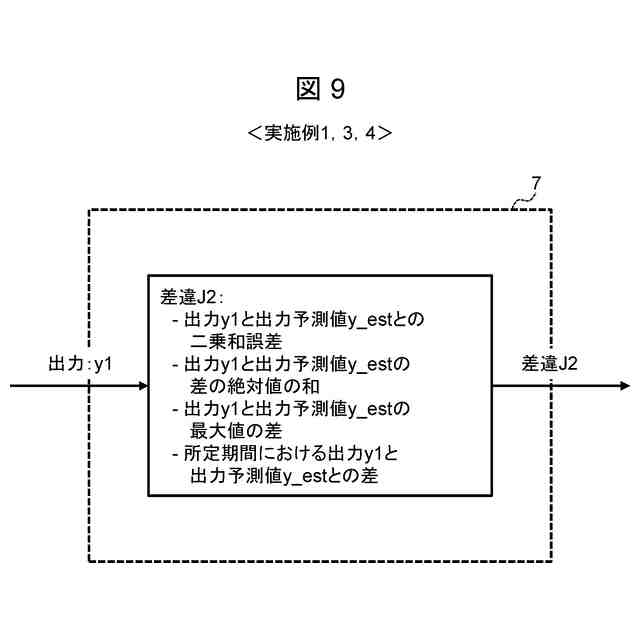
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の出力y1と
前記出力予測値y_estとの差e2に基づく値J2は、
前記実際の出力y1と前記出力予測値y_estとの二乗和誤差もしくは、
前記実際の出力y1と前記出力予測値y_estの差の絶対値の和もしくは、
前記実際の出力y1の最大値と前記出力予測値y_estの最大値の差もしくは、
所定期間における前記実際の出力y1と前記出力予測値y_estとの差
であることを特徴とする制御装置。
【請求項5】
請求項1において、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の入力u1と
前記入力予測値u_estとの差e3に基づく値J3は、
前記実際の入力u1と前記入力予測値u_estとの二乗和誤差もしくは、
前記実際の入力u1と前記入力予測値u_estの差の絶対値の和もしくは、
前記実際の入力u1と前記入力予測値u_estの最大値の差もしくは、
所定期間における前記実際の入力u1と前記入力予測値u_estとの差
であることを特徴とする制御装置。
【請求項6】
請求項1において、
前記各制御ゲイン値Kp2,Ki2,Kd2を再び最適化演算する手段は、
一定周期で処理を実行もしくはユーザーが指定した時に処理を実行する
ことを特徴とする制御装置。
【請求項7】
請求項1において、
前記各制御ゲイン値Kp1,Ki1,Kd1を最適化演算する手段もしくは
前記各制御ゲイン値Kp2,Ki2,Kd2を最適化演算する手段は、
所望の出力ydを実現するために必要な入力プロフィールもしくは入力の最大値を表示する手段
を備えたことを特徴とする制御装置。
【請求項8】
請求項1において、
前記J4は、
「前記制御対象の実際の出力y1と前記所望の出力ydとの誤差e4の二乗値」に、
「前記入力予測値u_estの最大値に所定の係数を乗じた値」を加えた値
であることを特徴とする制御装置。
【請求項9】
請求項1において、
前記制御装置が制御する対象は、
加熱炉などの温度制御もしくは
モータを用いた位置制御
であることを特徴とする制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、PID制御のゲイン値を自動チューニングする制御装置に関するものであり、特に、再チューニングの時期およびその実行を自動的に行う制御装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
本技術の背景技術として、特開2007-213483号公報(特許文献1)がある。この文献には、「本発明の第二の目的を達成するために、本発明では、二つの評価関数を準備し、一方の評価関数を用いて制御パラメータを決定し、決定された制御パラメータと他方の評価関数とから、制御性能を評価するようにしている。具体的には、請求項4に記載するように、前記評価関数IXTAEを含む第一の評価関数を用いて前記シミュレータで得られた複数の制御パラメータのうち、少なくとも一つの制御パラメータの共通性から、少なくとも偏差及び操作量に関する変数の項と重み関数とを含む第二の評価関数の未知のパラメータを決定し、実際の運転データから得られた制御量及び操作量から求めた前記第二の評価関数の値の変動に基づいて、制御性能の評価を行う制御性能評価部を設ける。([0007]参照)」と記載されている。
【0003】
また、特開2021-111017号公報(特許文献2)がある。この文献には、「制御対象の所望の出力値を演算する演算部と、前記所望の出力値と前記制御対象の出力値との差が小さくなるように、PID制御器のゲイン値を調整するゲイン値調整部と、前記演算部のパラメータ値を変更するパラメータ変更部とを備え、前記ゲイン値調整部は、前記PID制御器のゲイン値を調整し、前記パラメータ変更部は、前記PID制御器のゲイン値が調整された後、前記制御対象の出力の計測値及び推定値のオーバーシュート量及びアンダーシュート量の少なくとも一つが所定範囲内にない場合、前記ゲイン値調整部によって新たに演算されたゲイン値が所定範囲内にない場合、前記ゲイン値調整部によって新たに演算されたゲイン値が所定値に達した場合、前記制御対象への入力値が所定範囲内にない場合、及び、前記制御対象への入力値が所定値に達した場合、の少なくとも一つが成立すると、前記演算部のパラメータ値を変更し、前記ゲイン値調整部は、前記演算部のパラメータ値が変更された後、前記PID制御器のゲイン値を再調整することを特徴とする制御装置。([請求項1]参照)」と記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2007-213483号公報
特開2021-111017号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前述の先行技術(特許文献1)は、制御出力と制御目標との差に基づいて、再チューニング時期を判断するので、チューニング時に所望した制御出力との差に基づくものではない。
【0006】
また、先行技術(特許文献2)は、制御対象の所望の出力値を演算する演算部のパラメータを自動チューニングし、当該演算部のパラメータを再チューニングしたことにより、所望の出力が変わるので、PID制御ゲイン値を再チューニングするものの、所望の出力を変えない時に、PID制御ゲイン値を自動チューニングのタイミングを判断し、自動チューニングするものではない。
【課題を解決するための手段】
【0007】
上記課題を解決するために、例えば特許請求の範囲の記載の構成を採用する。本願は、上記課題を解決する手段を複数含んでいるが、例えば、
PID制御のPIDゲイン値Kp(Pゲイン)、Ki(Iゲイン)、Kd(Dゲイン)の値を自動チューニングする装置において、
制御目標rを演算する手段を備え、
制御目標rに対する制御対象の所望の出力ydを演算する手段を備え、
少なくとも、前記制御対象の実際の出力yと前記所望の出力ydとの誤差e1の二乗値に基づくJ1を演算する手段を備え、
前記J1が小さくなるように、各制御ゲイン値Kp1,Ki1,Kd1を最適化演算する手段を備え、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の出力予測値y_est
もしくは
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の入力予測値u_est
を演算する手段を備え、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の出力y1と
前記出力予測値y_estとの差e2に基づく値J2
もしくは
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の入力u1と
前記入力予測値u_estとの差e3に基づく値J3
を演算する手段を備え、
少なくとも、
前記J2もしくはJ3を表示する手段もしくは、
前記J2もしくはJ3が所定値以上のとき報知する手段もしくは、
前記制御対象の実際の出力y1と前記所望の出力ydとの誤差e4の二乗値に基づくJ4が小さくなるように、各制御ゲイン値Kp2,Ki2,Kd2を再び最適化演算する手段
を備えたことを特徴とする制御装置である。
【0008】
また、例えば、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の出力予測値y_estは、
前記所望の出力ydもしくはデータ駆動予測で予測した出力予測値y_est'
であることを特徴とする制御装置である。
【0009】
また、例えば、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の入力予測値u_estは、
データ駆動予測で予測した入力予測値u_est'
であることを特徴とする制御装置である。
【0010】
また、例えば、
前記Kp1,Ki1,Kd1を用いたときの前記制御対象の実際の出力y1と
前記出力予測値y_estとの差e2に基づく値J2は、
前記実際の出力y1と前記出力予測値y_estとの二乗和誤差もしくは、
前記実際の出力y1と前記出力予測値y_estの差の絶対値の和もしくは、
前記実際の出力y1の最大値と前記出力予測値y_estの最大値の差もしくは、
所定期間における前記実際の出力y1と前記出力予測値y_estとの差
であることを特徴とする制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
蓄電装置
1か月前
株式会社日立製作所
回転電機
28日前
株式会社日立製作所
回転電機
1か月前
株式会社日立製作所
制御基板
1か月前
株式会社日立製作所
制御装置
4日前
株式会社日立製作所
エレベーター
1か月前
株式会社日立製作所
エレベーター
1か月前
株式会社日立製作所
電動機制御装置
11日前
株式会社日立製作所
レール把持装置
1日前
株式会社日立製作所
コントローラー
1か月前
株式会社日立製作所
機能割付システム
18日前
株式会社日立製作所
環境評価システム
6日前
株式会社日立製作所
航空機用の推進装置
11日前
株式会社日立製作所
沿岸環境監視システム
11日前
株式会社日立製作所
輸送計画装置及び方法
27日前
株式会社日立製作所
受診支援装置および方法
今日
株式会社日立製作所
巻上機及びエレベーター
1か月前
株式会社日立製作所
分析システム及び分析方法
1か月前
株式会社日立製作所
現新比較テスト支援システム
1か月前
株式会社日立製作所
療養指導支援装置および方法
1か月前
株式会社日立製作所
プログラム検証支援システム
28日前
株式会社日立製作所
対話システムおよび対話方法
今日
株式会社日立製作所
エレベーター及び保護カバー
1か月前
株式会社日立製作所
搬送制御装置及び搬送制御方法
今日
株式会社日立製作所
接点浄化装置及び風力発電装置
1か月前
株式会社日立製作所
めっき装置及びめっき形成方法
1か月前
株式会社日立製作所
釣合いおもり及びエレベーター
1か月前
株式会社日立製作所
生産計画立案支援装置及び方法
1か月前
株式会社日立製作所
情報処理装置および情報処理方法
1か月前
株式会社日立製作所
設計支援装置および設計支援方法
1日前
株式会社日立製作所
電力融通システム、電力システム
1か月前
株式会社日立製作所
補修指示装置および補修指示方法
1か月前
株式会社日立製作所
情報処理システム及び情報処理方法
14日前
株式会社日立製作所
画像解析システム及び画像解析方法
28日前
株式会社日立製作所
施策策定方法及び施策策定システム
28日前
株式会社日立製作所
契約照会システム及び契約照会方法
27日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ