TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128826
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025764
出願日
2024-02-22
発明の名称
情報処理システム、情報処理方法
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G06Q
50/04 20120101AFI20250827BHJP(計算;計数)
要約
【課題】作業者による一連のアトミック動作の認識結果から上位レベルの動作を正確に推定する。
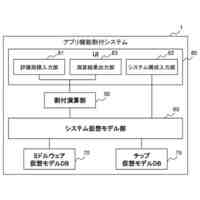
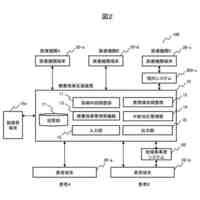
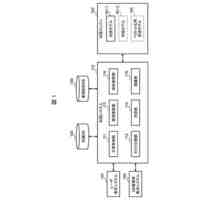
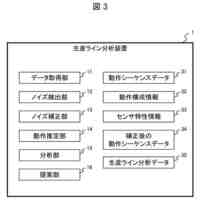
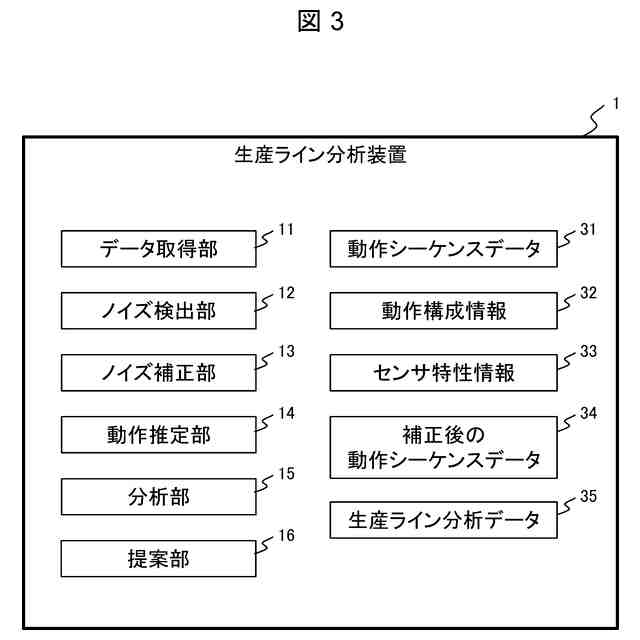
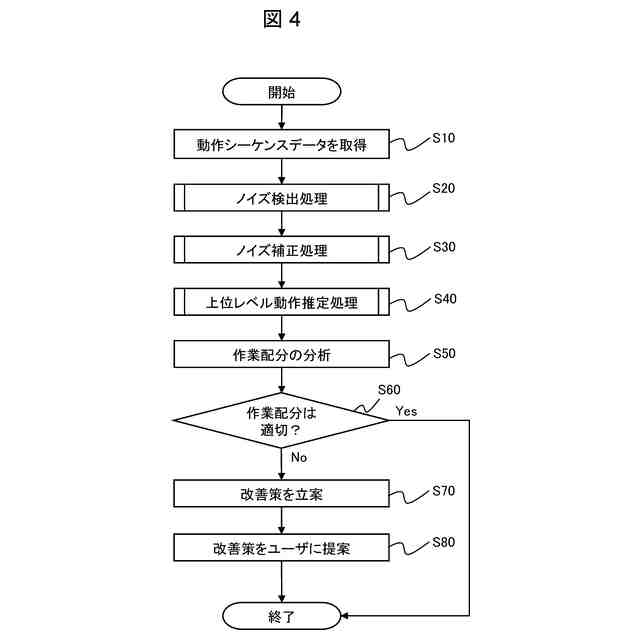
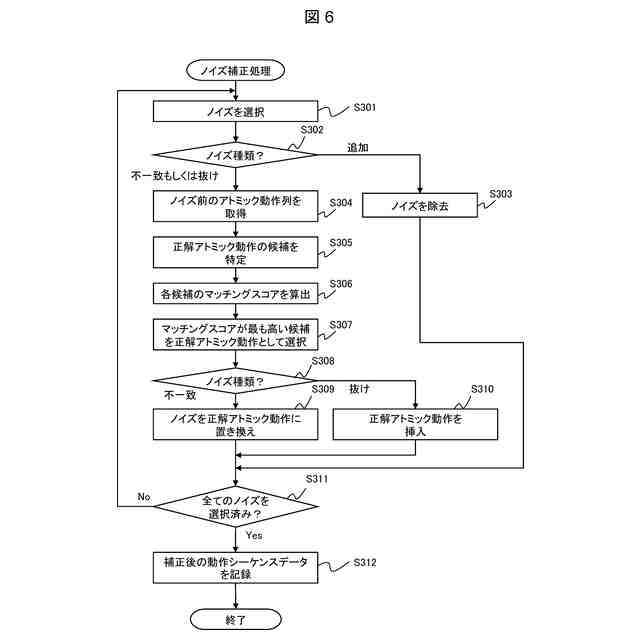
【解決手段】生産ライン分析装置1は、複数の作業ステーションを有する生産ラインにおける作業者の一連の動作を表す動作シーケンスデータ31を取得するデータ取得部11と、作業者によるアトミック動作と複数のアトミック動作の組み合わせからなる上位レベル動作との関係を表す動作構成情報32に基づいて、動作シーケンスデータ31からノイズを検出するノイズ検出部12と、ノイズが低減されるように動作シーケンスデータ31を補正するノイズ補正部13と、ノイズ補正部13による補正後の動作シーケンスデータ34に基づいて、生産ラインの各作業ステーションで作業者が実施した作業項目に対応する上位レベル動作を推定する動作推定部14と、を備える。
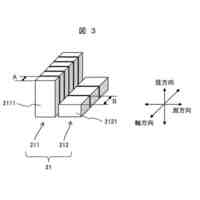
【選択図】図3
特許請求の範囲
【請求項1】
複数の作業ステーションを有する生産ラインにおける作業者の一連の動作を表す動作シーケンスデータを取得するデータ取得部と、
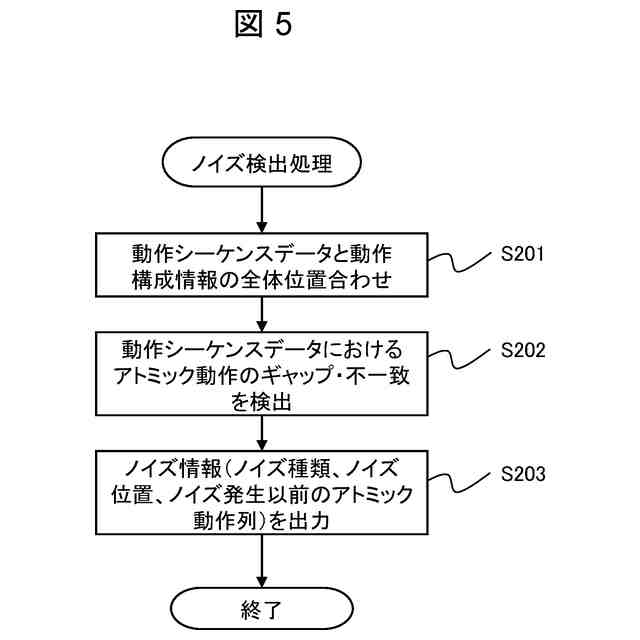
前記作業者によるアトミック動作と複数の前記アトミック動作の組み合わせからなる上位レベル動作との関係を表す動作構成情報に基づいて、前記動作シーケンスデータからノイズを検出するノイズ検出部と、
前記ノイズが低減されるように前記動作シーケンスデータを補正するノイズ補正部と、
前記ノイズ補正部による補正後の前記動作シーケンスデータに基づいて、前記生産ラインの各作業ステーションで前記作業者が実施した作業項目に対応する前記上位レベル動作を推定する動作推定部と、を備える情報処理システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の情報処理システムにおいて、
前記動作推定部は、補正後の前記動作シーケンスデータにおいて所定の個数のアトミック動作を組み合わせたセグメントを順方向と逆方向にそれぞれ設定し、前記セグメントに基づいて前記上位レベル動作の区切りを推定する情報処理システム。
【請求項3】
請求項1に記載の情報処理システムにおいて、
前記動作推定部は、補正後の前記動作シーケンスデータにおける前記アトミック動作の並びに対して複数の前記上位レベル動作の候補をそれぞれ特定し、特定した各候補と過去の前記上位レベル動作の推定結果との組み合わせについて、前記動作構成情報に対するアライメントスコアを計算し、前記アライメントスコアに基づいて複数の前記候補の中からいずれかを選択することにより、前記作業項目に対応する前記上位レベル動作を推定する情報処理システム。
【請求項4】
請求項1に記載の情報処理システムにおいて、
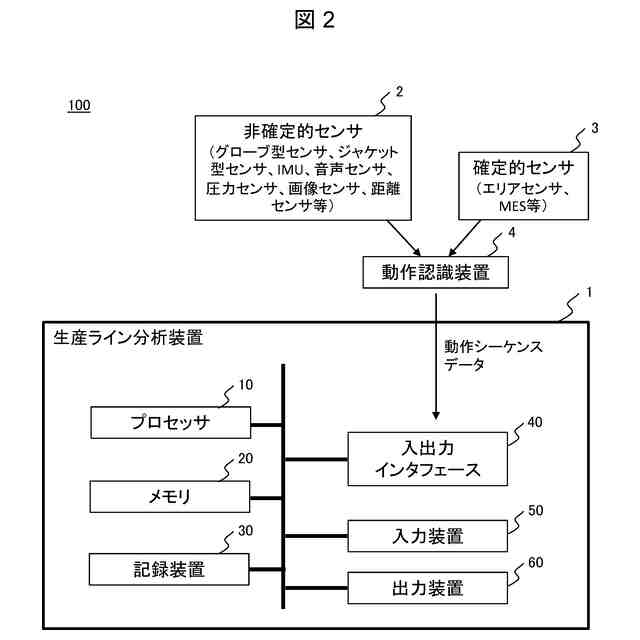
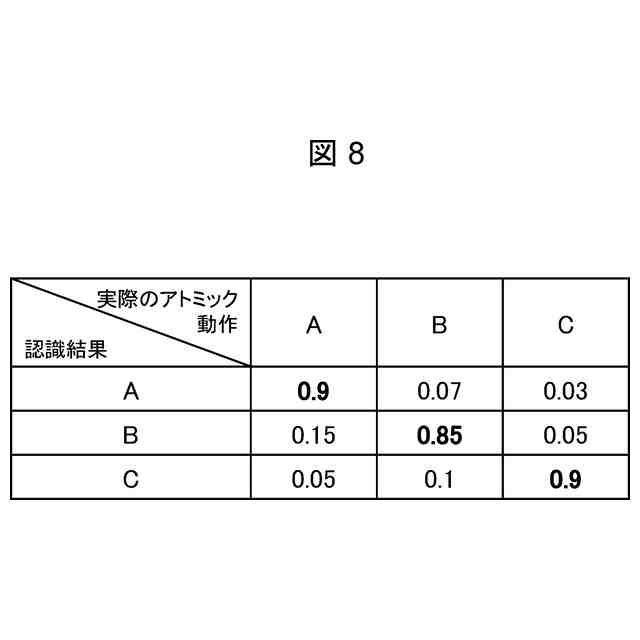
前記動作シーケンスデータは、前記作業者の動作を検出するセンサによって取得されたセンサデータに基づいてそれぞれ認識された複数の前記アトミック動作の並びを表し、
前記ノイズは、前記センサデータに基づく前記アトミック動作の認識結果における前記動作構成情報に対する不一致またはギャップであり、
前記ノイズ補正部は、予め設定された前記センサの特性情報を用いて前記ノイズの補正を行うことで、前記動作シーケンスデータを補正する情報処理システム。
【請求項5】
請求項1に記載の情報処理システムにおいて、
前記生産ラインの各作業ステーションについて、前記動作推定部により推定された前記上位レベル動作に対応する前記作業項目の開始時刻および/または終了時刻の分析を行う分析部と、
各作業ステーションでの前記作業項目ごとの前記開始時刻および/または前記終了時刻を用いて、前記生産ラインに対する改善策の提案を行う提案部と、を備える情報処理システム。
【請求項6】
請求項5に記載の情報処理システムにおいて、
前記分析部は、前記上位レベル動作に含まれる複数の前記アトミック動作を、前記作業ステーションで前記作業者が実施する前記作業項目の中核をなす中核動作と、前記中核動作以外の非中核動作と、にそれぞれ分類し、
前記提案部は、前記中核動作に要した第1の時間と、前記非中核動作に要した第2の時間とを比較し、その比較結果に基づいて前記改善策の提案を行う情報処理システム。
【請求項7】
請求項6に記載の情報処理システムにおいて、
前記中核動作は、ネジ締めを含み、
前記非中核動作は、歩行および/または工具の把持を含む情報処理システム。
【請求項8】
請求項5に記載の情報処理システムにおいて、
前記提案部は、前記上位レベル動作における前記アトミック動作の並び順と、同一の前記作業ステーションで実施される複数の前記作業項目の実施順序と、前記作業項目が実施される前記作業ステーションと、の少なくともいずれか1つの変更を、前記改善策として提案する情報処理システム。
【請求項9】
請求項5に記載の情報処理システムにおいて、
前記提案部は、前記生産ラインにおける複数の前記作業ステーションのレイアウトと、前記作業ステーションで前記作業者が使用する工具の配置と、前記作業ステーションにおける製品または部品の配置と、の少なくともいずれか1つの変更を、前記改善策として提案する情報処理システム。
【請求項10】
請求項1に記載の情報処理システムにおいて、
前記動作シーケンスデータは、前記作業者が前記作業項目を実施中に、前記作業者の動作を検出するセンサによって取得されたセンサデータに基づいてそれぞれ認識された複数の前記アトミック動作の並びを表し、
前記センサは、慣性計測装置、音声センサ、圧力センサ、画像センサ、距離センサおよびウェアラブルセンサの少なくともいずれか1つを含む情報処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、生産ラインの各工程の作業分析に利用される情報処理システムおよび情報処理方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
一般的に、自動車等の様々な製品を製造する生産ラインは、複数の作業ステーションにより構成される。例えば1時間当たりの生産台数を60台とした場合、各々の作業時間が1分である60個の作業ステーションにより生産ラインが構成され、この生産ラインでは1分ごとに製品が完成する。また、各作業ステーションの作業時間は、5分や10分などに設定することもできる。各作業ステーションでは、人間やロボット等の作業者が製品の生産に関する所定の作業項目を実施する。
【0003】
生産ラインでは、各作業ステーションの作業配分が適切になされていないと、作業ステーション間で作業時間にばらつきが生じる。例えば、全ての作業ステーションの平均作業時間が5分の場合に、ある作業ステーションでは作業時間が7~8分であり、別の作業ステーションでは作業時間が3~4分であるとする。このような場合、前者の作業ステーションは過負荷状態となって仕掛中の製品が滞留する一方で、後者の作業ステーションでは作業待ちが発生する。こうした状態は、生産ラインのアンバランスと呼ばれており、これは生産性の低下をもたらすため、できるだけ避けることが好ましい。
【0004】
製品の生産性を向上するためには、各作業ステーションの作業時間を適切にバランス化させることが重要である。これを実現するには、各作業ステーションにおける作業項目ごとの作業時間を正確に知る必要がある。そこで近年では、各作業ステーションでの作業者の動作データを取得し、この動作データに基づいて、各作業ステーションにおける作業者の一連の動作を機械学習等を利用してコンピュータにより認識することで、認識した動作に対応する作業項目を特定してその作業時間を計測する作業分析方法が考案されている。しかしながら、こうした作業分析方法では、コンピュータの処理能力や機械学習の特性などの制限により、長時間の複雑な動作を正しく認識するのは難しい。また、生産ラインや作業者が異なれば、同じ作業項目に対して作業者の動作が一致しない場合がある。これらの理由から、作業者の動作データから作業者の一連の動作を正確に認識するのは困難である。
【0005】
そこで、各作業ステーションにおける作業者の一連の動作を、短時間の動作(以下「アトミック動作」と称する)ごとに分解し、アトミック動作単位で動作認識を行う手法が提案されている。この手法により、コンピュータを利用した動作認識を実現することが可能となる。また、生産ラインや生産者が異なっても個々のアトミック動作は多くの共通点を有するため、作業単位での動作認識が困難な場合でも、アトミック動作単位では正しい動作認識が可能となる。
【0006】
アトミック動作単位で動作認識を行う場合、認識された様々なアトミック動作の中から作業項目ごとの開始動作と終了動作をそれぞれ特定することで、一連のアトミック動作に対して作業項目ごとに区切りを設定し、この区切りで仕切られたアトミック動作の並びを各作業ステーションでの作業項目に対応する上位レベルの動作に変換する必要がある。この点に関して、例えば特許文献1や非特許文献1が知られている。特許文献1には、LSTM(Long Short Term Memory)およびCNN(Convolutional Neural Network)を用いて、画像データからアトミック動作を認識し、その認識結果に対してFSA(Finite State Automata)と呼ばれる数学モデルを適用することで、複数のアトミック動作の組み合わせからなる上位レベルの動作を特定する手法が記載されている。また非特許文献1には、CRF(Conditional Random Field)と呼ばれる確率モデルを用いて、アトミック動作に相当する一連の低次レベルの動作から上位レベルの動作を推定する手法が記載されている。
【先行技術文献】
【特許文献】
【0007】
米国特許第11,054,811号明細書
【非特許文献】
【0008】
Bordel, B., Alcarria, R., & Robles, T., "Recognizing human activities in Industry 4.0 scenarios through an analysis-modeling-recognition algorithm and context labels", Integrated Computer-Aided Engineering, 29 (2022), p. 83-103
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の手法は、ルールベースのモデルであるFSAを用いて上位レベルの動作を特定するため、得られたアトミック動作の認識結果がノイズを含む場合や、事前に定められたルールから逸脱している場合などには、上位レベルの動作を正しく特定するのに不十分である。すなわち、アトミック動作の認識精度は100%とは限らず、また作業者は作業中に動作ミスを行う場合もあり、これらの状況下で得られた一連のアトミック動作に対して、FSAでは上位レベル動作の区切りを十分な精度で設定することが難しい。一方、非特許文献1の手法は、確率モデルを用いて上位レベルの動作を特定するため、例えば生産ラインにおいて作業ステーションごとに独自の作業マニュアルがある場合や、複数の上位レベル動作にわたって共通のアトミック動作がある場合などには、上位レベルの動作を所望の精度で推定することが困難である。
【0010】
本発明は、こうした背景に基づきなされたものであり、作業者による一連のアトミック動作の認識結果から上位レベルの動作を正確に推定することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
制御基板
1か月前
株式会社日立製作所
蓄電装置
1か月前
株式会社日立製作所
制御装置
5日前
株式会社日立製作所
回転電機
29日前
株式会社日立製作所
エレベーター
1か月前
株式会社日立製作所
レール把持装置
2日前
株式会社日立製作所
電動機制御装置
12日前
株式会社日立製作所
機能割付システム
19日前
株式会社日立製作所
環境評価システム
7日前
株式会社日立製作所
航空機用の推進装置
12日前
株式会社日立製作所
沿岸環境監視システム
12日前
株式会社日立製作所
輸送計画装置及び方法
28日前
株式会社日立製作所
受診支援装置および方法
1日前
株式会社日立製作所
巻上機及びエレベーター
1か月前
株式会社日立製作所
プログラム検証支援システム
29日前
株式会社日立製作所
現新比較テスト支援システム
1か月前
株式会社日立製作所
療養指導支援装置および方法
1か月前
株式会社日立製作所
直動接点および巻線切替装置
今日
株式会社日立製作所
対話システムおよび対話方法
1日前
株式会社日立製作所
釣合いおもり及びエレベーター
1か月前
株式会社日立製作所
接点浄化装置及び風力発電装置
1か月前
株式会社日立製作所
搬送制御装置及び搬送制御方法
1日前
株式会社日立製作所
設計支援装置および設計支援方法
2日前
株式会社日立製作所
情報処理装置および情報処理方法
1か月前
株式会社日立製作所
情報処理システム、情報処理方法
今日
株式会社日立製作所
再エネ調達手段選定支援システム
今日
株式会社日立製作所
電力融通システム、電力システム
1か月前
株式会社日立製作所
施策策定方法及び施策策定システム
29日前
株式会社日立製作所
画像解析システム及び画像解析方法
29日前
株式会社日立製作所
情報処理システム及び情報処理方法
5日前
株式会社日立製作所
情報抽出システム及び情報抽出方法
8日前
株式会社日立製作所
契約照会システム及び契約照会方法
28日前
株式会社日立製作所
情報処理システム及び情報処理方法
15日前
株式会社日立製作所
ワークフロー作成支援装置及び方法
1日前
株式会社日立製作所
行動解析システム、及び行動解析方法
19日前
株式会社日立製作所
ガス分離システムおよび濃度制御方法
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ