TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134406
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032290
出願日
2024-03-04
発明の名称
衝突リスク予測プログラム、衝突リスク予測方法及び衝突リスク予測装置
出願人
富士通株式会社
,
東洋建設株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G08G
3/02 20060101AFI20250909BHJP(信号)
要約
【課題】船舶同士の衝突の危険を低減させる衝突リスク予測プログラム、衝突リスク予測方法及び衝突リスク予測装置を提供する。
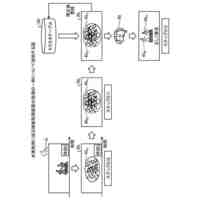
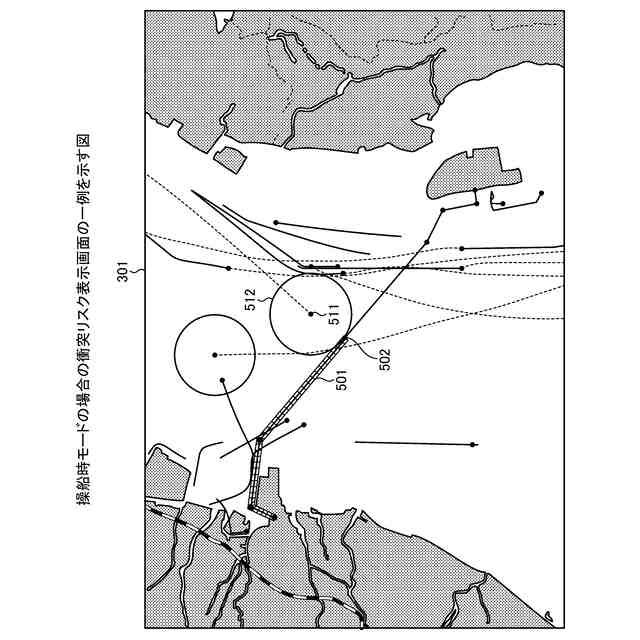
【解決手段】所定領域における過去の船舶の航行情報の時系列データを用いて機械学習モデルに学習させ、所定領域に存在する他船の航行情報の現在までの時系列データを基に、学習済みの機械学習モデルを用いて、時間経過に応じた他船位置を予測し、所定領域における自船の現在の航行情報を基に、時間経過に応じた自船位置を予測し、時間経過に応じた他船位置及び自船位置の予測結果を基に衝突リスク情報を生成し、生成した衝突リスク情報を通知する。
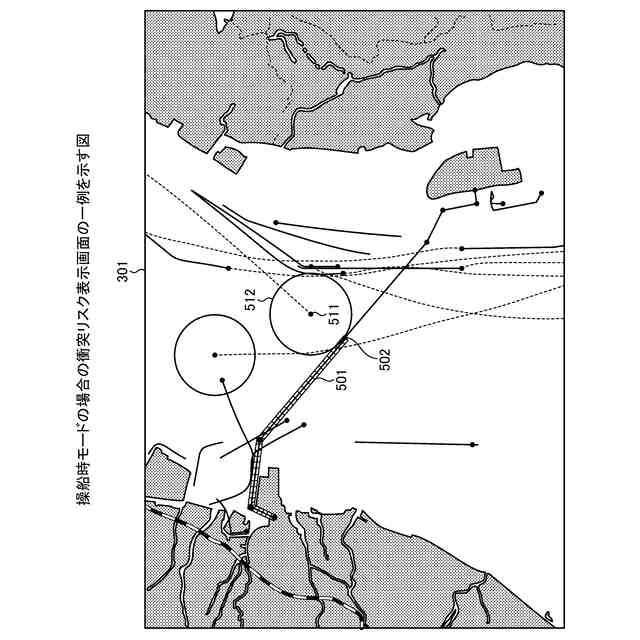
【選択図】図7
特許請求の範囲
【請求項1】
所定領域における過去の船舶の航行情報の時系列データを用いて機械学習モデルに学習させ、
前記所定領域に存在する他船の航行情報の現在までの時系列データを基に、学習済みの前記機械学習モデルを用いて、時間経過に応じた他船位置を予測し、
前記所定領域における自船の現在の航行情報を基に、時間経過に応じた自船位置を予測し、
時間経過に応じた前記他船位置及び前記自船位置の予測結果を基に衝突リスク情報を生成し、
生成した前記衝突リスク情報を通知する
処理をコンピュータに実行させることを特徴とする衝突リスク予測プログラム。
続きを表示(約 1,400 文字)
【請求項2】
前記自船位置の予測処理は、自船の出航前に、前記自船の現在の航行情報として、自船の出航地点、出航時刻及び自船の速度を基に、時間経過に応じた前記自船位置を予測する処理を含むことを特徴とする請求項1に記載の衝突リスク予測プログラム。
【請求項3】
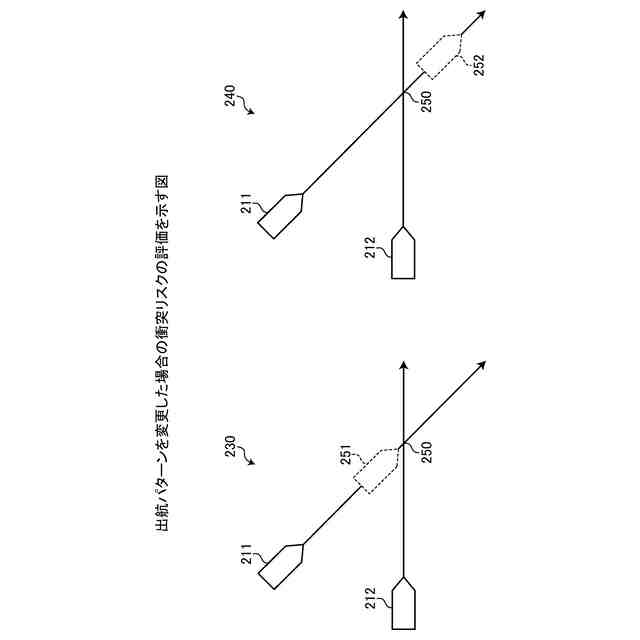
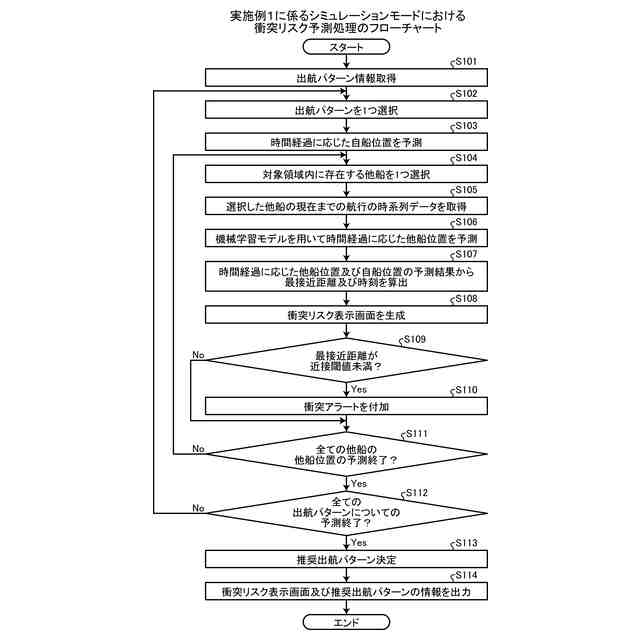
前記自船位置の予測処理は、出航時刻及び自船の速度のそれぞれを変化させた組合せの出航パターン毎に、前記自船位置を予測する処理を含み、
前記衝突リスク情報の生成処理は、前記出航パターン毎に前記衝突リスク情報を生成する処理を含む
ことを特徴とする請求項2に記載の衝突リスク予測プログラム。
【請求項4】
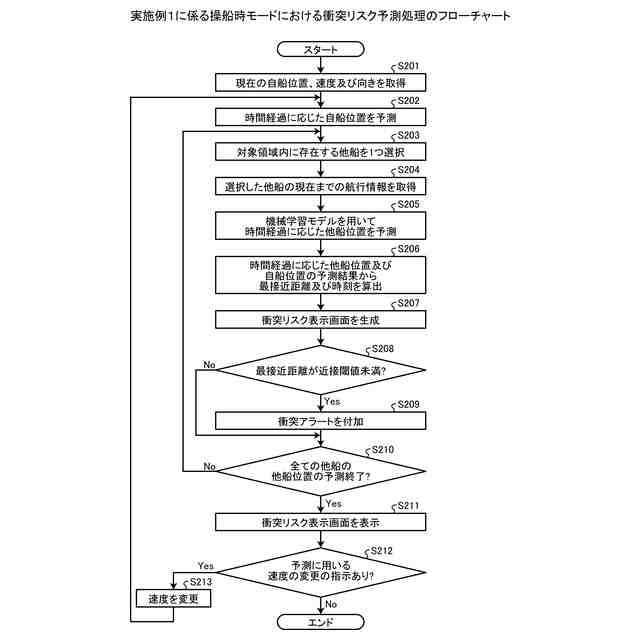
前記自船位置の予測処理は、1以上の経由点の指定を受けて、前記自船の現在の航行情報として、自船の現在位置、自船の速度及び前記経由点を基に、時間経過に応じた前記自船位置を予測する処理を含み、
前記衝突リスク情報の生成処理は、前記経由点を通過する場合の前記衝突リスク情報を生成する処理を含む
ことを特徴とする請求項1に記載の衝突リスク予測プログラム。
【請求項5】
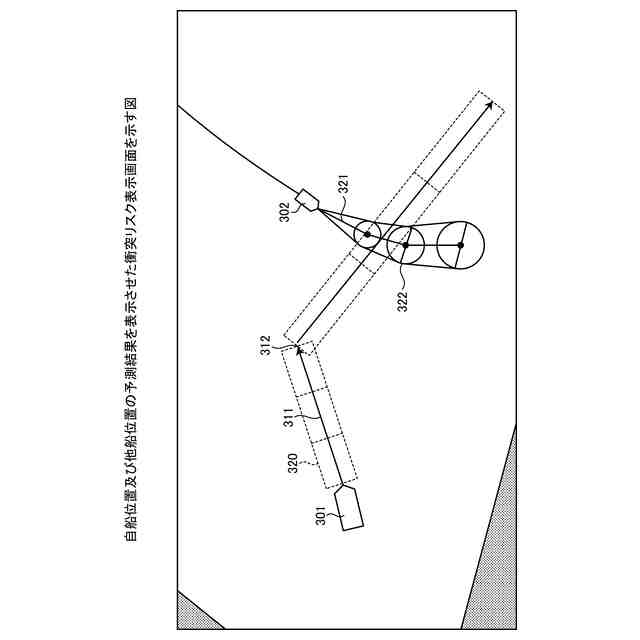
前記衝突リスク情報の生成処理は、時間経過に応じた前記他船位置及び前記自船位置の予測結果を示す衝突リスク表示画面を前記衝突リスク情報として生成することを特徴とする請求項1に記載の衝突リスク予測プログラム。
【請求項6】
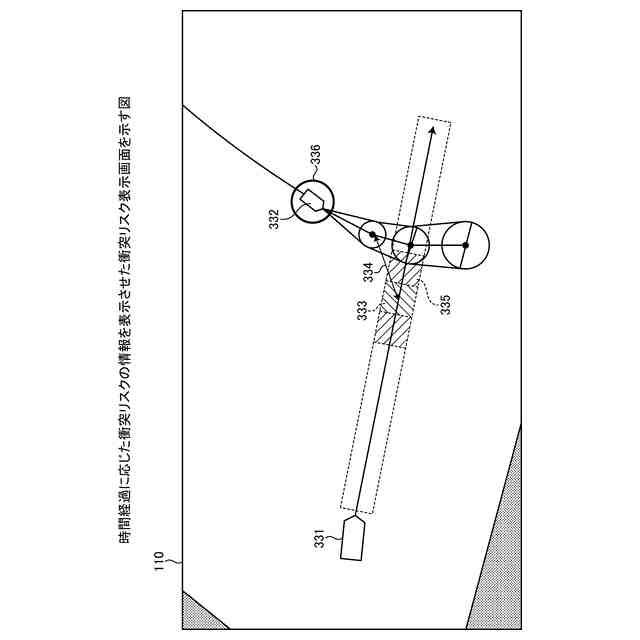
前記衝突リスク情報の生成処理は、予測された前記他船位置及び前記自船位置が特定の時刻において予め決められた近接閾値未満である場合に衝突リスクが高いと判定して、前記特定の時刻に衝突リスクが高いことを示す情報を前記衝突リスク表示画面に表示させる処理を含むことを特徴とする請求項5に記載の衝突リスク予測プログラム。
【請求項7】
衝突リスク予測装置が、
所定領域における過去の船舶の航行情報の時系列データを用いて機械学習モデルに学習させ、
前記所定領域に存在する他船の航行情報の現在までの時系列データを基に、学習済みの前記機械学習モデルを用いて、時間経過に応じた他船位置を予測し、
前記所定領域における自船の現在の航行情報を基に、時間経過に応じた自船位置を予測し、
時間経過に応じた前記他船位置及び前記自船位置の予測結果を基に衝突リスク情報を生成し、
生成した前記衝突リスク情報を通知する
処理を実行することを特徴とする衝突リスク予測方法。
【請求項8】
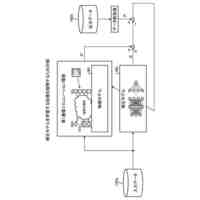
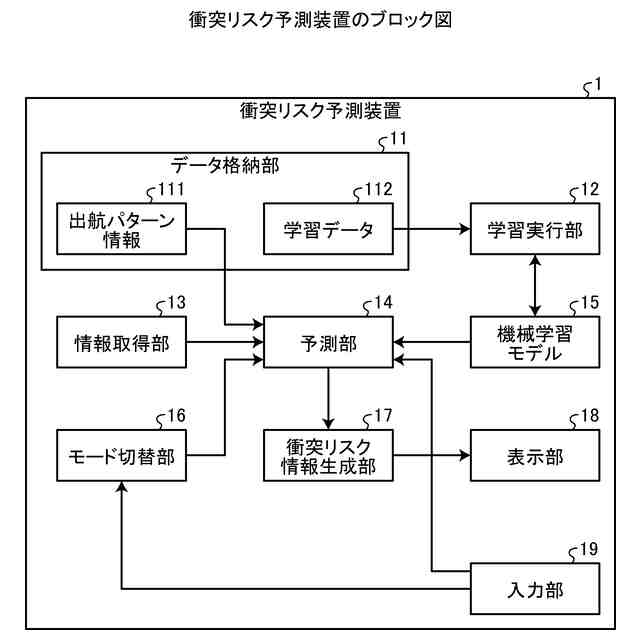
所定領域における過去の船舶の航行情報の時系列データを用いて機械学習モデルに学習させる学習実行部と、
前記所定領域に存在する他船の位置及び他船の航行情報の現在までの時系列データを基に、学習済みの前記機械学習モデルを用いて、時間経過に応じた他船位置を予測し、かつ、前記所定領域における自船の現在の航行情報を基に、時間経過に応じた自船位置を予測する予測部と、
前記予測部による時間経過に応じた前記他船位置及び前記自船位置の予測結果を基に、衝突リスク情報を生成する衝突リスク情報生成部と、
前記衝突リスク情報生成部により生成された前記衝突リスク情報を通知する通知部と
を備えたことを特徴とする衝突リスク予測装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、衝突リスク予測プログラム、衝突リスク予測方法及び衝突リスク予測装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
土木業界や建築業界では、高齢化や人手不足に対応するため、作業の省力化及び自動化に向けた取り組みが進められている。一方、省力化を行いながらも、現場の安全確保のために積極的な新技術の採用が行われている。例えば、海上工事において作業船や交通船の他船との衝突回避のために、様々な技術が導入されている。
【0003】
従来、作業船や交通船を航行するにあたり、船長は、目視により周囲を確認して、自己の経験に基づいた判断により、他船との衝突を回避するように操船する。他にも、工事管理者等は、レーダやチャート(海図)上にプロットされた情報に基づき他船動向を把握して、作業船が移動する対象区域の俯瞰的な確認を行うことで、衝突回避が行われてきた。また、レーダにはARPA(Automatic Radar Plotting Aids:自動衝突予防援助装置)機能を有するものが存在し、そのようなレーダでは、他船との最接近距離及び最接近時刻が表示される。
【0004】
他にも、衝突回避のための技術として以下のような技術が存在する。例えば、所定の予定に基づいてする自船の将来の状態を予測し、他船の現状から将来の状態を予測し、予測結果に基づき自船と他船との将来の衝突危険度を求め、さらに時間で重み付けをして衝突危険度を順次算出する技術が提案されている。また、第1の船舶及び第2の船舶それぞれの位置及び過去の進行情報に基づき、第1の船舶及び第2の船舶の一方または両方の将来進路方向幅を算出して、算出した将来進路方向幅を基に衝突リスクを求める技術が提案されている。
【先行技術文献】
【特許文献】
【0005】
特開平11-272999号公報
特開2017-182730号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、船長の目視や工事管理者等による俯瞰的な確認では、各船舶の正確な動向を得ることは難しく、船舶同士の衝突回避を適切に行うことは困難である。ARPA機能は、500トン以上(交通船は15トン程度)の船舶は搭載義務があるが、全ての船舶に搭載されているわけではなく、船舶同士の衝突回避を適切に行うことは困難である。また、ARPA機能は、自船及び他船の航路を速度一定で直線や一定の曲率を持たせた曲線として幾何学的に計算しており、加減速を行っている船舶や方向を変えている船舶に関して衝突回避を行うことは困難である。
【0007】
また、予定から予測される自船の将来の状態と他船の現状から予測される他船の将来の状態とから将来の衝突危険度を求める技術では、直線的に航路が予測されるため、実際の操船と乖離する場合があり、船舶同士の衝突回避を適切に行うことは困難である。また、位置及び過去の進行情報から将来進路方向幅を算出して衝突リスクを求める技術では、港湾の形状を含めた予測は行っておらず、実際の操船と乖離する場合があり、船舶同士の衝突回避を適切に行うことは困難である。
【0008】
開示の技術は、上記に鑑みてなされたものであって、船舶同士の衝突の危険を低減させる衝突リスク予測プログラム、衝突リスク予測方法及び衝突リスク予測装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本願の開示する衝突リスク予測プログラム、衝突リスク予測方法及び衝突リスク予測装置の一つの態様において、所定領域における過去の船舶の航跡の時系列データを用いて機械学習モデルに学習させ、前記所定領域に存在する他船の位置及び他船の速度の現在までの時系列データを基に、学習済みの前記機械学習モデルを用いて、時間経過に応じた他船位置を予測し、前記所定領域における自船の現在位置及び自船の速度を基に、時間経過に応じた自船位置を予測し、時間経過に応じた前記他船位置及び前記自船位置の予測結果を基に衝突リスク情報を生成し、生成した衝突リスク情報を通知する処理をコンピュータに実行させる。
【発明の効果】
【0010】
1つの側面では、本発明は、船舶同士の衝突の危険を低減させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士通株式会社
周波数変換器
7日前
富士通株式会社
行列演算回路
4日前
富士通株式会社
医用画像処理方法
1か月前
富士通株式会社
転倒検出方法及び装置
1か月前
富士通株式会社
冷却装置及び電子機器
4日前
富士通株式会社
ハイブリッド光増幅器
1か月前
富士通株式会社
量子デバイスの製造方法
1か月前
富士通株式会社
制御装置及び基地局制御方法
2か月前
富士通株式会社
量子ビットデバイスの製造方法
2か月前
富士通株式会社
演算処理装置及び演算処理方法
15日前
富士通株式会社
通信制御装置及び移動中継装置
1日前
富士通株式会社
マーキング方法及びプログラム
2か月前
富士通株式会社
動的多次元メディアコンテンツ投影
14日前
富士通株式会社
バイアスのための生成人工知能の検査
2か月前
富士通株式会社
ポイントクラウドレジストレーション
1か月前
富士通株式会社
異常予測方法および異常予測プログラム
14日前
富士通株式会社
データ転送制御装置および情報処理装置
1か月前
富士通株式会社
視線誘導方法および視線誘導プログラム
1か月前
富士通株式会社
データ転送制御装置および情報処理装置
1か月前
富士通株式会社
量子デバイス及び量子デバイスの制御方法
2か月前
富士通株式会社
管理装置、管理方法、および管理プログラム
2日前
富士通株式会社
演算システムおよび演算システムの制御方法
22日前
富士通株式会社
生成人工知能を使用したデータセット符号化
25日前
富士通株式会社
推定プログラム、推定方法および情報処理装置
1か月前
富士通株式会社
交通シミュレーションのための方法および装置
14日前
富士通株式会社
学習プログラム、学習方法および情報処理装置
2か月前
富士通株式会社
画像を記述する構造化テキストを生成する方法
1か月前
富士通株式会社
推定プログラム、推定方法および情報処理装置
1か月前
富士通株式会社
描画プログラム、描画方法および情報処理装置
2か月前
富士通株式会社
学習プログラム、学習方法、及び情報処理装置
1か月前
富士通株式会社
予測プログラム、予測方法および情報処理装置
16日前
富士通株式会社
シストリック型の演算アレイ装置及び制御方法
16日前
富士通株式会社
プログラム、情報処理方法および情報処理装置
今日
富士通株式会社
電源制御回路,情報処理装置および電源制御方法
1か月前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
1か月前
富士通株式会社
演算装置、情報処理装置及び演算装置の制御方法
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ