TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121812
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024086493
出願日
2024-05-28
発明の名称
ポイントクラウドレジストレーション
出願人
富士通株式会社
代理人
個人
,
個人
主分類
G06T
7/32 20170101AFI20250813BHJP(計算;計数)
要約
【課題】 ポイントクラウドレジストレーションの方法を提供する。
【解決手段】 コンピュータ実装された方法は、ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、該2D重なり部分は、ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に対応し、2D重なり部分を複数のセルに分割し、ソース2D投影からの少なくとも閾値数のポイントと、ターゲット2D投影からの少なくとも閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、該重なりセルについて比較プロセスを実行し、最良一致ターゲットセットを選択し、ソースセットのポイントと最良一致ターゲットセットのポイントとの間の又はその逆の間の変換を決定し、該変換を適用して、ソース3Dポイントクラウドをターゲット3Dポイントクラウドに又はその逆にレジストレーションする、ことを有する。
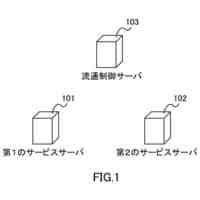
【選択図】 図1
特許請求の範囲
【請求項1】
コンピュータ実装された方法であって、
ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、前記2D重なり部分は、前記ソース地理的エリアと前記ターゲット地理的エリアとの間の重なり領域に対応し、
前記2D重なり部分を複数のセルに分割し、前記ソース2D投影からの少なくとも第1閾値数のポイントと、前記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内に入る前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内に入る前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内に入る前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有するコンピュータ実装された方法。
続きを表示(約 5,800 文字)
【請求項2】
コンピュータ実装された方法であって、
ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に基づいて、ソース3Dポイントクラウドとターゲット3Dポイントクラウドとの間の3D重なりボリュームを推定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、前記ソース地理的エリア及び前記ターゲット地理的エリアを表し、
前記3D重なりボリュームを複数のセルに分割し、前記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、前記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内にある前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内にある前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内にある前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有するコンピュータ実装された方法。
【請求項3】
前記ソースセットを前記複数のターゲットセットの各々と比較することは、各ターゲットセットについて、
前記ソースセットのポイントの形状と該ターゲットセットのポイントの形状との間で第1の比較を実行して、該ターゲットセットについての前記類似スコアに対する第1の寄与を決定する、及び/又は
前記ソースセットのポイントの強度と該ターゲットセットのポイントの強度との間で第2の比較を実行して、該ターゲットセットについての前記類似スコアに対する第2の寄与を決定する、
ことを有する、請求項1又は2に記載のコンピュータ実装された方法。
【請求項4】
前記ソースセットを前記複数のターゲットセットの各々と比較することは、第1及び/又は第2の比較プロセスを実行することを有し、
前記第1の比較プロセスは、前記ソースセットのポイントの凸包を決定し、前記ソースセットのポイントの前記凸包の二面角の第1分布を決定し、各ターゲットセットについて、
該ターゲットセットのポイントの凸包を決定し、
該ターゲットセットのポイントの前記凸包の二面角の第2分布を決定し、
二面角の前記第1分布と前記第2分布との間の差異を計算し、
前記計算された差異に基づいて、該ターゲットセットについての前記類似スコアに対する寄与を追加する、ことを有し、
前記第2の比較プロセスは、前記ソースセット内のポイントの強度の第1分布を決定し、各ターゲットセットについて、
該ターゲットセット内のポイントの強度の第2分布を決定し、
強度の前記第1分布と前記第2分布との間の距離尺度を計算し、
前記計算された距離尺度に基づいて、該ターゲットセットについての前記類似スコアに対する寄与を追加する、ことを有する、
請求項1又は2に記載のコンピュータ実装された方法。
【請求項5】
複数の重なりセルが決定された場合に、
各重なりセルについて前記比較プロセスを実行し、
前記最良一致ターゲットセットのうちの少なくとも1つの最良一致ターゲットセットのポイントを有する最終ターゲットセットのポイントを決定し、対応する少なくとも1つのソースセットのポイントを有する最終ソースセットのポイントを決定し、
前記最終ソースセットのポイントと前記最終ターゲットセットのポイントとの間で前記変換を決定する、
ことを有する、請求項1又は2に記載のコンピュータ実装された方法。
【請求項6】
最終ターゲットセットのポイントを決定することは、前記最良一致ターゲットセットのうち、閾値スコアを上回る類似スコアを有する又は最も高い類似スコアを有する少なくとも1つを選択し、前記選択された少なくとも1つの最良一致ターゲットセットのポイントを含むものとして前記最終ターゲットセットのポイントを決定する、ことを有する、請求項5に記載のコンピュータ実装された方法。
【請求項7】
コンピュータ上で実行されるときに該コンピュータに方法を実行させるコンピュータプログラムであって、当該方法は、
ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、前記2D重なり部分は、前記ソース地理的エリアと前記ターゲット地理的エリアとの間の重なり領域に対応し、
前記2D重なり部分を複数のセルに分割し、前記ソース2D投影からの少なくとも第1閾値数のポイントと、前記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内に入る前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内に入る前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内に入る前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有する、コンピュータプログラム。
【請求項8】
コンピュータ上で実行されるときに該コンピュータに方法を実行させるコンピュータプログラムであって、当該方法は、
ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に基づいて、ソース3Dポイントクラウドとターゲット3Dポイントクラウドとの間の3D重なりボリュームを推定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、前記ソース地理的エリア及び前記ターゲット地理的エリアを表し、
前記3D重なりボリュームを複数のセルに分割し、前記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、前記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内にある前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内にある前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内にある前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ことを有する、コンピュータプログラム。
【請求項9】
メモリと、該メモリに接続されたプロセッサと、を有する情報処理装置であって、前記プロセッサが、
ソース3Dポイントクラウドのソース2D投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、前記2D重なり部分は、前記ソース地理的エリアと前記ターゲット地理的エリアとの間の重なり領域に対応し、
前記2D重なり部分を複数のセルに分割し、前記ソース2D投影からの少なくとも第1閾値数のポイントと、前記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内に入る前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内に入る前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内に入る前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ように構成される、情報処理装置。
【請求項10】
メモリと、該メモリに接続されたプロセッサと、を有する情報処理装置であって、前記プロセッサが、
ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に基づいて、ソース3Dポイントクラウドとターゲット3Dポイントクラウドとの間の3D重なりボリュームを推定し、前記ソース3Dポイントクラウド及び前記ターゲット3Dポイントクラウドは、それぞれ、前記ソース地理的エリア及び前記ターゲット地理的エリアを表し、
前記3D重なりボリュームを複数のセルに分割し、前記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、前記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し、
前記重なりセルについて比較プロセスを実行し、当該比較プロセスは、
前記重なりセル内にある前記ターゲット3Dポイントクラウドの第1ターゲットセットのポイント、並びに前記重なりセルに隣接するセル内にある前記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なるターゲットセットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、
前記重なりセル内にある前記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、
前記ソースセットを前記複数のターゲットセットの各々と比較して、前記複数のターゲットセットそれぞれについての複数の類似スコアを決定し、
前記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、
前記ソースセットのポイントと前記最良一致ターゲットセットのポイントとの間の又は前記最良一致ターゲットセットのポイントと前記ソースセットのポイントとの間の変換を決定し、
前記変換を適用して、前記ソース3Dポイントクラウドを前記ターゲット3Dポイントクラウドに又は前記ターゲット3Dポイントクラウドを前記ソース3Dポイントクラウドにレジストレーションする、
ように構成される、情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本出願は、ポイントクラウドレジストレーションに関し、特に、コンピュータ実装された方法、コンピュータプログラム、及び情報プログラミング装置に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
ポイントクラウドアライメントとしても知られるポイントクラウドレジストレーションのタスクは、共通座標系において複数のポイントクラウドをレジストレーションしたり、1つ以上のポイントクラウドを別のポイントクラウドと又は別のポイントクラウドにアライメントしたりするプロセスである。レジストレーションは、別のポイントクラウドとのアライメントのために1つのポイントクラウドに必要な変換を推定し、推定された変換を適用することを含み得る。ポイントクラウドレジストレーションは、複数のより小さいポイントクラウドから、より大きいポイントクラウドが構築されることを可能にする。
【0003】
以上に鑑み、ポイントクラウドレジストレーション方法が望まれる。
【発明の概要】
【0004】
第1の態様の一実施形態によれば、コンピュータ実装された方法がここに開示され、当該コンピュータ実装された方法は、ソース3D(3次元)ポイントクラウドのソース2D(2次元)投影とターゲット3Dポイントクラウドのターゲット2D投影との間の2D重なり部分を決定し、上記ソース3Dポイントクラウド及び上記ターゲット3Dポイントクラウドは、それぞれ、ソース地理的エリア及びターゲット地理的エリアを表し、上記2D重なり部分は、上記ソース地理的エリアと上記ターゲット地理的エリアとの間の重なり領域に対応し、上記2D重なり部分を複数のセルに分割し、上記ソース2D投影からの少なくとも第1閾値数のポイントと、上記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し(又は、上記ソース2D投影からの少なくとも第1閾値数のポイントと、上記ターゲット2D投影からの少なくとも第2閾値数のポイントと、を含む少なくとも1つのセルを、少なくとも1つの重なりセルとして決定し)、上記(又は上記)重なりセルについて比較プロセスを実行し、(上記重なりセルについての)当該比較プロセスは、(上記ターゲット2D投影において)上記重なりセル内に入る上記ターゲット3Dポイントクラウドの第1(ターゲット)セットのポイント、並びに(上記ターゲット2D投影において)上記重なりセルに隣接する/取り囲むセル内に入る上記ターゲット3Dポイントクラウドの第2ターゲットセットのポイント及び更なる(ターゲット)セットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、(上記ソース2D投影において)上記重なりセル内に入る上記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、上記ソースセットを上記複数のターゲットセットの各々と比較して、上記複数のターゲットセットそれぞれについての複数の類似スコアを決定し(各類似スコアが、上記ソースセットと上記ターゲットセットとの間の類似性を定量化し)、上記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、上記ソースセットのポイントと上記最良一致ターゲットセットのポイントとの間の又は上記最良一致ターゲットセットのポイントと上記ソースセットのポイントとの間の変換(行列)を決定し、上記変換(行列)を(上記ソース3Dポイントクラウドに)適用して、上記ソース3Dポイントクラウドを上記ターゲット3Dポイントクラウドに又は上記ターゲット3Dポイントクラウドを上記ソース3Dポイントクラウドにレジストレーションする、ことを有する。
【0005】
第2の態様の一実施形態によれば、コンピュータ実装された方法がここに開示され、当該コンピュータ実装された方法は、ソース地理的エリアとターゲット地理的エリアとの間の重なり領域に基づいて、ソース3D(3次元)ポイントクラウドとターゲット3Dポイントクラウドとの間の3D重なりボリュームを推定し、上記ソース3Dポイントクラウド及び上記ターゲット3Dポイントクラウドは、それぞれ、上記ソース地理的エリア及び上記ターゲット地理的エリアを表し、上記3D重なりボリュームを複数のセルに分割し、上記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、上記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つの重なりセルを決定し(又は、上記ソース3Dポイントクラウドからの少なくとも第1閾値数のポイントと、上記ターゲット3Dポイントクラウドからの少なくとも第2閾値数のポイントと、を含む少なくとも1つのセルを、少なくとも1つの重なりセルとして決定し)、上記(又は上記)重なりセルについて比較プロセスを実行し、(上記重なりセルについての)当該比較プロセスは、上記重なりセル内にある上記ターゲット3Dポイントクラウドの第1(ターゲット)セットのポイント、並びに上記重なりセルに隣接する/取り囲むセル内にある上記ターゲット3Dポイントクラウドの第2(ターゲット)セットのポイント及び更なる(ターゲット)セットのポイント、をそれぞれ有する複数のターゲットセットのポイントを決定し、上記重なりセル内にある上記ソース3Dポイントクラウドのポイントを有するソースセットのポイントを決定し、上記ソースセットを上記複数のターゲットセットの各々と比較して、上記複数のターゲットセットそれぞれについての複数の類似スコアを決定し(各類似スコアが、上記ソースセットと上記ターゲットセットとの間の類似性を定量化し)、上記類似スコアに基づいて、最良一致ターゲットセットを選択する、ことを有し、上記ソースセットのポイントと上記最良一致ターゲットセットのポイントとの間の又は上記最良一致ターゲットセットのポイントと上記ソースセットのポイントとの間の変換(行列)を決定し、上記変換(行列)を(上記ソース3Dポイントクラウド)適用して、上記ソース3Dポイントクラウドを上記ターゲット3Dポイントクラウドに又は上記ターゲット3Dポイントクラウドを上記ソース3Dポイントクラウドにレジストレーションする、ことを有する。
【0006】
任意の態様/実施形態に関する特徴が、任意の他の態様/実施形態に適用されてもよい。
【図面の簡単な説明】
【0007】
単なる例として図面が参照され得る。
ポイントクラウドレジストレーションを理解するのに有用な図である。
比較となる方法を示す図である。
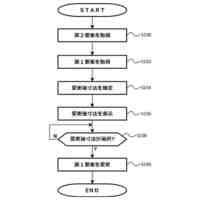
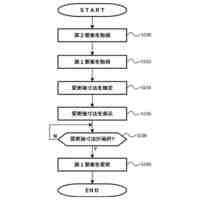
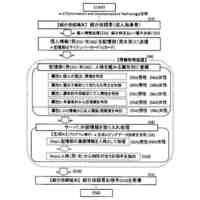
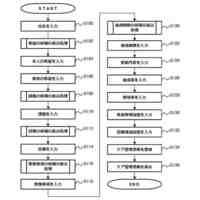
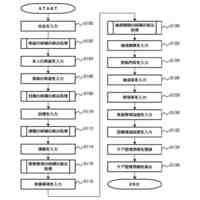
方法を示すフローチャートである。
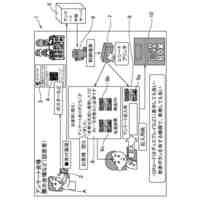
方法を示す図である。
方法を示す図である。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
方法を示すフローチャートである。
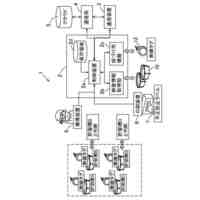
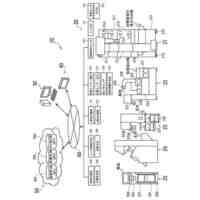
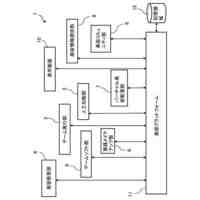
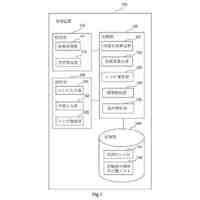
装置を示す図である。
【発明を実施するための形態】
【0008】
上述のように、ポイントクラウドレジストレーションのタスクは、共通座標系において複数のポイントクラウドをアライメントするプロセスである。アライメントされるポイントクラウドをソースポイントクラウドと呼ぶことができ、(それとソースポイントクラウドがアライメントされることになる)別のポイントクラウドを基準ポイントクラウド又はターゲットポイントクラウドと呼ぶことができる。
【0009】
ポイントクラウドレジストレーションは、ターゲットポイントクラウドとのアライメントのためにソースポイントクラウドに必要な変換を推定し、ソースポイントクラウドをターゲットポイントクラウドの座標系に持ち込むために、すなわち、ターゲットポイントクラウドとのアライメントのために、ソースポイントクラウドに変換を適用することを含む。
【0010】
一用途例として、例えばLiDAR(Light Detection and Ranging,光検出及び測距)などのセンサから取得される連続したポイントクラウドフレームをレジストレーションすることにより、ロボット/車両は、それらの位置及び向きを正確に推定し、自律的に移動することができる。3Dポイントクラウドレジストレーションの更なる用途は、自律運転、一般的な3Dマッピング及びモデリング、ロボット工学、無人航空機、並びに(例えば、エッジデバイス上での)3Dマップの生成及び/又はリアルタイム更新を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
裁判のAI化
1か月前
個人
フラワーコートA
18日前
個人
工程設計支援装置
10日前
個人
情報処理システム
1か月前
個人
検査システム
1か月前
個人
介護情報提供システム
25日前
個人
携帯情報端末装置
11日前
個人
設計支援システム
1か月前
個人
設計支援システム
1か月前
株式会社サタケ
籾摺・調製設備
1か月前
キヤノン電子株式会社
携帯装置
1か月前
個人
結婚相手紹介支援システム
7日前
株式会社カクシン
支援装置
1か月前
個人
アンケート支援システム
20日前
個人
備蓄品の管理方法
1か月前
キヤノン株式会社
情報処理装置
1か月前
個人
ジェスチャーパッドのガイド部材
24日前
サクサ株式会社
中継装置
21日前
サクサ株式会社
中継装置
1か月前
大阪瓦斯株式会社
住宅設備機器
4日前
キヤノン株式会社
情報処理装置
1か月前
アスエネ株式会社
排水量管理方法
1か月前
株式会社やよい
美容支援システム
今日
株式会社寺岡精工
システム
24日前
東洋電装株式会社
操作装置
1か月前
東洋電装株式会社
操作装置
1か月前
株式会社アジラ
移動方向推定装置
19日前
株式会社村田製作所
ラック
6日前
個人
リテールレボリューションAIタグ
17日前
キヤノン電子株式会社
名刺管理システム
1か月前
株式会社ゼロワン
ケア支援システム
10日前
飛鳥興産株式会社
物品買取システム
13日前
株式会社ゼロワン
ケア支援システム
10日前
日本電気株式会社
システム及び方法
1か月前
株式会社JVCケンウッド
管理装置
1か月前
株式会社アザース
企業連携システム
25日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ