TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119588
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2025009584
出願日
2025-01-23
発明の名称
転倒検出方法及び装置
出願人
富士通株式会社
代理人
弁理士法人ITOH
主分類
G01S
13/89 20060101AFI20250806BHJP(測定;試験)
要約
【課題】本発明の実施例は、転倒検出方法及び装置を提供する。
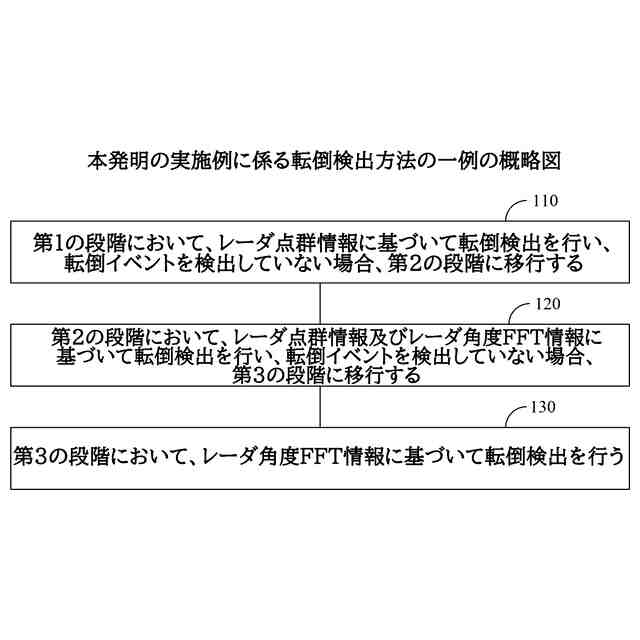
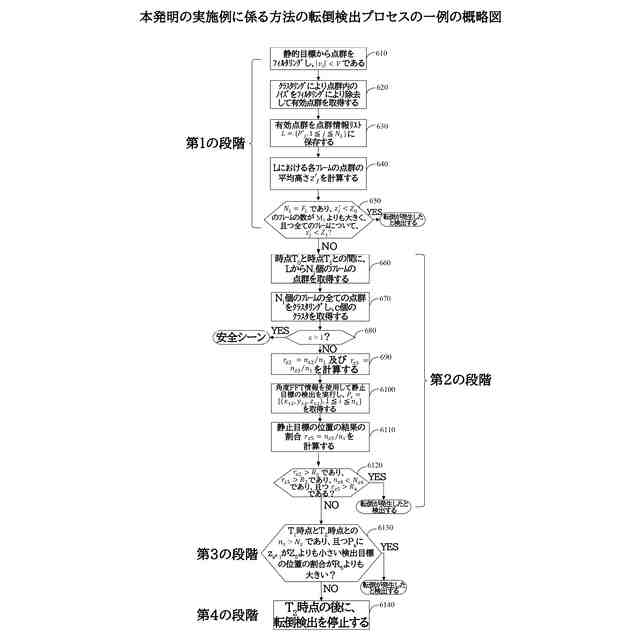
【解決手段】該転倒検出方法は、第1の段階において、レーダ点群情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第2の段階に移行するステップと、第2の段階において、レーダ点群情報及びレーダ角度FFT情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第3の段階に移行するステップと、第3の段階において、レーダ角度FFT情報に基づいて転倒検出を行うステップと、を含む。本発明の実施例によれば、転倒が発生する可能性のある異なる段階において、レーダ点群情報及びレーダ角度FFT情報を用いて転倒検出を行い、転倒イベントが発生したか否かを判断することによって、転倒検出の速度及び信頼性を向上させる。
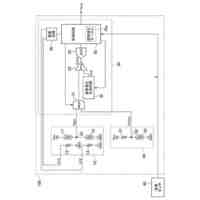
【選択図】図1
特許請求の範囲
【請求項1】
転倒検出装置であって、
第1の段階において、レーダ点群情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第2の段階に移行し、第2の段階において、レーダ点群情報及びレーダ角度FFT情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第3の段階に移行し、第3の段階において、レーダ角度FFT情報に基づいて転倒検出を行う検出部、を含む、装置。
続きを表示(約 1,900 文字)
【請求項2】
前記第1の段階において、前記検出部は、転倒イベントを検出した場合、検出を停止し、
前記第2の段階において、前記検出部は、転倒イベントを検出した場合、検出を停止し、
前記第3の段階において、前記検出部は、転倒イベントを検出した場合、検出を停止し、転倒イベントを検出していない場合、転倒が発生していないと判定する、請求項1に記載の装置。
【請求項3】
前記第2の段階において、新たなレーダ点群が出現した場合、前記第1の段階に移行し、
前記第3の段階において、新たなレーダ点群が出現した場合、前記第1の段階に移行する、請求項1に記載の装置。
【請求項4】
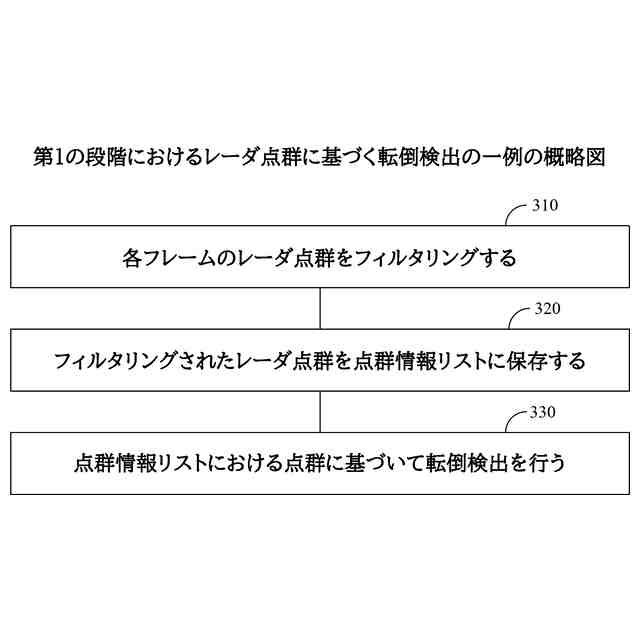
前記検出部は、第1の段階において、レーダ点群情報に基づいて転倒検出を行う際に、
各フレームのレーダ点群をフィルタリングし、ドップラ速度が第1の閾値Vよりも小さい点群及び/又は点群内のノイズをフィルタリングにより除去し、
フィルタリングされたレーダ点群を点群情報リストに保存し、
前記点群情報リストにおける点群に基づいて転倒検出を行う、請求項1に記載の装置。
【請求項5】
点群内のノイズをフィルタリングにより除去することは、
クラスタリング方法を用いて各フレームの点群をクラスタリングし、クラスタリングに成功した、あるクラスタに属する点群を保留し、クラスタリングに失敗した、何れのクラスタにも属さない点群を除去することを含み、
前記クラスタリングに成功した条件は、クラスタ内の点群の数が第2の閾値n
c
よりも大きく、且つ点群内の各点から同一のクラスタ内の他の点群までの最小距離が第3の閾値d
c
よりも小さいことである、請求項4に記載の装置。
【請求項6】
前記検出部は、第2の段階において、レーダ点群情報及びレーダ角度FFT情報に基づいて転倒検出を行う際に、
点群情報リストからN
1
個のフレームの有効点群データを取得し、
前記N
1
個のフレームの有効点群データに対してクラスタリング処理を行い、
前記クラスタリング処理により得られた点群クラスタの数が1以下である場合、レーダ角度FFT情報に基づいて静止目標の位置を検出し、
前記N
1
個のフレームの有効点群データ及び前記静止目標の位置に基づいて、転倒イベントが発生したか否かを判断する、請求項1に記載の装置。
【請求項7】
前記点群情報リストにおける有効点群データのフレーム数が前記N
1
よりも小さい場合、転倒が発生していないと判定し、前記検出部は検出を終了する、請求項6に記載の装置。
【請求項8】
点群クラスタの数が1よりも大きい場合、安全シーンであると判定し、前記検出部は検出を終了する、請求項6に記載の装置。
【請求項9】
条件を満たす場合、転倒イベントが発生したと判定し、そうでない場合、転倒イベントが発生していないと判定し、前記条件は、
高さが第6の閾値Z
2
よりも小さい点群の割合r
z2
が第7の閾値R
2
よりも大きいこと、
高さが第8の閾値Z
3
よりも小さい点群の割合r
z3
が第9の閾値R
3
よりも大きいこと、
高さが第10の閾値Z
4
よりも大きい点群の数n
z4
が第11の閾値N
z4
よりも小さいこと、及び
複数回の検出により得られた静止目標の位置集合P
s
に、静止目標の位置と前記N
1
個のフレームの有効点群の中心との距離d
i
が第12の閾値D
1
よりも小さく、且つ静止目標の位置の高さz
s,i
が第13の閾値Z
5
よりも小さいことを満たす数n
z5
が占める割合r
z5
が、第14の閾値R
4
よりも大きいことを含む、請求項6に記載の装置。
【請求項10】
前記検出部は、第3の段階において、レーダ角度FFT情報に基づいて転倒検出を行う際に、
レーダ角度FFT情報に基づいて静止目標の位置を検出し、
前記静止目標の位置に基づいて、転倒イベントが発生したか否かを判定する、請求項1に記載の装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、生体検出の分野に関し、特に転倒検出方法及び装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
現在、高齢者人口の数量及び割合が益々増加しており、全世界の人口が高齢化段階に入っている。高齢者の身体健康及び生活の質に関心を持ち、高齢者が直面する問題を解決することは重要な社会的意義と経済的意義がある。転倒事故は、高齢者の身体健康及び生命の安全に極めて大きな損害を与える。国連保健機関の統計によると、転倒事故は、世界各地の故意ではない傷害による死亡の第2位の原因である。転倒検出技術は、転倒事故を迅速に発見し、救助を迅速に実施し、傷害の悪化を防止するのに役立つ。
【0003】
転倒検出の一般的なソリューションは、ビデオに基づく検出技術及びウェアラブルデバイスを使用した検出方法などがある。ビデオに基づく転倒検出技術は、インテリジェントな検出方法を用いてビデオデータを分析して転倒イベントを検出する。しかし、ビデオデータの取得には良好な照明条件が必要であるため、この技術は、夜間の光のない環境では使用できない。また、カメラはプライバシーを著しく侵害するため、寝室やトイレなどのプライベートな環境に配置することができない。ウェアラブルデバイスを使用した検出方法は、ジャイロスコープや加速度計などのセンサを用いてユーザの運動特性を分析して転倒の有無を判断する。この方法は、機能を発揮するためにユーザがデバイスを着用する必要があり、ウェアラブルデバイスの快適性の問題や頻繁な充電の問題により、ユーザの受容度が低い。
【0004】
なお、上述した技術背景の説明は、本発明の態様を明確、完全に理解させるための説明であり、当業者を理解させるために記述されているものである。これらの技術案は、単なる本発明の背景技術部分として説明されたものであり、当業者により周知されたものではない。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の発明者の発見によると、ミリ波レーダに基づく転倒検出技術は、ユーザがデバイスを着用する必要がなく、照明の必要がなく、プライバシー保護の利点を有し、寝室やトイレなどのプライベートな場所に応用することができ、良好な市場潜在力を有する。レーダに基づく転倒検出技術は、人体の運動特性を分析し、機械学習又はテンプレートマッチングなどの方法を用いて転倒が発生したか否かを判断することができる。また、レーダの信号変動に基づいて人が地面に横たわっているか否かを検出して、転倒が発生したか否かを判断することもできる。しかし、前者の場合は、検出漏れの問題が発生しやすく、後者の場合は、検出時間が長く、誤検出が発生しやすい。さらに、レーダにより提供可能な情報が少なく、転倒を迅速、且つ確実に検出することも課題である。
【0006】
上記の問題点の少なくとも1つ又は同様な問題点を鑑み、本発明の実施例は、転倒が発生する可能性のある異なる段階において、レーダ点群情報及びレーダ角度FFT情報を用いて転倒検出を行い、転倒イベントが発生したか否かを判断することによって、転倒検出の速度及び信頼性を向上させることができる、転倒検出方法及び装置を提供する。
【課題を解決するための手段】
【0007】
本発明の実施例の1つの態様では、転倒検出装置であって、第1の段階において、レーダ点群情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第2の段階に移行し、第2の段階において、レーダ点群情報及びレーダ角度FFT情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第3の段階に移行し、第3の段階において、レーダ角度FFT情報に基づいて転倒検出を行う検出部、を含む、装置を提供する。
【0008】
本発明の実施例のもう1つの態様では、転倒検出方法であって、第1の段階において、レーダ点群情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第2の段階に移行するステップと、第2の段階において、レーダ点群情報及びレーダ角度FFT情報に基づいて転倒検出を行い、転倒イベントを検出していない場合、第3の段階に移行するステップと、第3の段階において、レーダ角度FFT情報に基づいて転倒検出を行うステップと、を含む、方法を提供する。
【0009】
本発明の実施例のもう1つの態様では、コンピュータプログラムが記憶されたメモリと、プロセッサと、を含む、コンピュータ機器であって、前記プロセッサは、上記の方法を実現するように、前記コンピュータプログラムを実行するように構成される、コンピュータ機器を提供する。
【0010】
本発明の実施例のもう1つの態様では、コンピュータ読み取り可能なプログラムが記憶された記憶媒体であって、前記コンピュータ読み取り可能なプログラムは、上記の方法をコンピュータに実行させる、記憶媒体を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量スプーン
26日前
日本精機株式会社
位置検出装置
4日前
日本精機株式会社
位置検出装置
4日前
日本精機株式会社
位置検出装置
4日前
大和製衡株式会社
組合せ秤
9日前
大和製衡株式会社
組合せ秤
9日前
アズビル株式会社
圧力センサ
3日前
アンリツ株式会社
分光器
1か月前
トヨタ自動車株式会社
表示装置
18日前
エイブリック株式会社
磁気センサ回路
3日前
トヨタ自動車株式会社
検査装置
6日前
株式会社ユーシン
操作検出装置
6日前
株式会社東芝
センサ
9日前
株式会社東芝
センサ
9日前
ダイハツ工業株式会社
測定用具
1か月前
アンリツ株式会社
分光器
1か月前
TDK株式会社
磁気センサ
26日前
株式会社ヨコオ
コンタクタ
1か月前
株式会社ナリス化粧品
角層細胞採取用具
16日前
TDK株式会社
ガスセンサ
3日前
個人
粘塑性を用いた有限要素法の定式化
18日前
株式会社東芝
重量測定装置
2日前
東レエンジニアリング株式会社
計量装置
6日前
TDK株式会社
ガスセンサ
2日前
中国電力株式会社
異常箇所検出装置
17日前
富士電機株式会社
エンコーダ
3日前
三菱マテリアル株式会社
温度センサ
16日前
大同特殊鋼株式会社
超音波探傷方法
26日前
日本碍子株式会社
ガスセンサ
27日前
株式会社関電工
検相器用治具
24日前
個人
材料特性パラメータの算定方法
26日前
三菱マテリアル株式会社
温度センサ
16日前
成田空港給油施設株式会社
保持治具
17日前
株式会社熊谷組
RI計測装置
4日前
TDK株式会社
磁気計測装置
17日前
富士電機株式会社
半導体パッケージ
26日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ