TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140627
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040146
出願日
2024-03-14
発明の名称
ロボットの操作装置
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
9/22 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】非常停止スイッチやイネーブルスイッチとは異なる方式でロボットの動作を停止させることができるロボットの操作装置を提供する。
【解決手段】操作装置は、情報を表示する表示部と、作業者からの操作入力を受け付ける入力部と、ソフトウェアの処理に基づいてロボットを停止させる停止処理を実行する停止処理部と、表示部又は入力部の異常の発生を監視する異常監視部と、を備える。停止処理部は、異常監視部が表示部又は入力部に異常が発生したことを検知した場合に停止処理を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
情報を表示する表示部と、
作業者からの操作入力を受け付ける入力部と、
ソフトウェアの処理に基づいてロボットを停止させる停止処理を実行する停止処理部と、
前記表示部又は前記入力部の異常の発生を監視する異常監視部と、を備え、
前記停止処理部は、前記異常監視部が前記表示部又は前記入力部に異常が発生したことを検知した場合に前記停止処理を実行する、
ロボットの操作装置。
続きを表示(約 460 文字)
【請求項2】
前記異常監視部は、前記表示部又は前記入力部に物理的な破損が生じたことに基づいて前記表示部又は前記入力部の異常の発生を検知する、
請求項1に記載のロボットの操作装置。
【請求項3】
前記異常監視部は、前記表示部の画面がフリーズしたことに基づいて前記表示部の異常の発生を検知する、
請求項1に記載のロボットの操作装置。
【請求項4】
前記異常監視部は、前記表示部の照度が低下したこと又は非表示となったことに基づいて前記表示部の異常の発生を検知する、
請求項1に記載のロボットの操作装置。
【請求項5】
前記異常監視部は、前記入力部が故障したことに基づいて前記入力部の異常の発生を検知する、
請求項1に記載のロボットの操作装置。
【請求項6】
前記ロボットを停止させる物理的なスイッチで構成されたイネーブルスイッチと非常停止スイッチとを更に備える、
請求項1から5のいずれか一項に記載の操作装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ロボットの操作装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ロボットの教示等を行う操作装置には、作業者等の安全を確保するために、ロボットの非常停止を行う非常停止スイッチや、作業者が意図して操作している間にのみロボットの動作を許可するイネーブルスイッチが設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2020-110873号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、作業者の安全性や利便性の更なる向上を図るために、非常停止スイッチやイネーブルスイッチ等の従来の方式とは異なる方式でロボットの動作を停止させることが求められている。
【0005】
本開示は、上述した事情に鑑みてなされたものであり、その目的は、非常停止スイッチやイネーブルスイッチとは異なる方式でロボットの動作を停止させることができるロボットの操作装置を提供することにある。
【課題を解決するための手段】
【0006】
実施形態によるロボットの操作装置は、情報を表示する表示部と、作業者からの操作入力を受け付ける入力部と、ソフトウェアの処理に基づいてロボットを停止させる停止処理を実行する停止処理部と、前記表示部又は前記入力部の異常の発生を監視する異常監視部と、を備える。前記停止処理部は、前記異常監視部が前記表示部又は前記入力部に異常が発生したことを検知した場合に前記停止処理を実行する。
【図面の簡単な説明】
【0007】
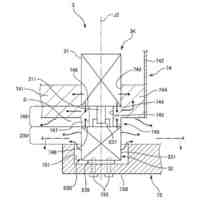
一実施形態によるロボットの操作装置の一例について概略構成を示す図
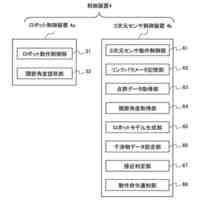
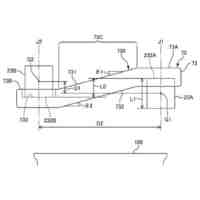
一実施形態によるロボットの操作装置の一例について電気的構成を概略的に示す図
一実施形態によるロボットの操作装置の一例について異常監視部における監視内容を示す図
一実施形態によるロボットの操作装置で実行される制御内容の一例を示すフローチャート
【発明を実施するための形態】
【0008】
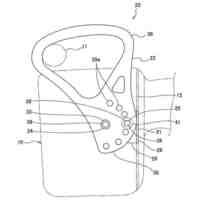
本開示のロボットの操作装置をいわゆるティーチングペンダントなどの教示装置に適用した一例について図面を参照して説明する。図1及び図2に示す操作装置10は、ロボットコントローラ91と通信可能に接続されており、ロボットコントローラ91を介してロボット92の動作を操作する。ロボット92は、操作装置10の操作対象であり、産業用のロボット、例えば垂直多関節型のロボット、水平多関節型のロボット、若しくはパラレルリンクロボットなどを想定している。
【0009】
ロボットコントローラ91は、非安全系制御装置911及び安全系制御装置912を備えている。非安全系制御装置911は、操作装置10からの設定や指示に基づいて制御指令を生成し出力するなどロボット92の動作を制御する主体となる装置である。安全系制御装置912は、例えば非常停止操作が入力されたときにロボット92への電力供給を遮断して停止させるなど安全に関する制御を行う主体となる装置である。
【0010】
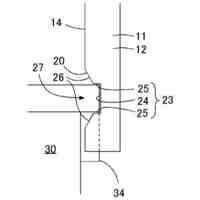
操作装置10は、図1に示すように、筐体11、電源スイッチ12、物理ボタン13、非常停止スイッチ14、イネーブルスイッチ15、表示部16、及び入力部17を備えている。筐体11は、作業者が手に持って扱うことができる大きさに構成されている。電源スイッチ12は、操作装置10の電源を入り切りするためのものである。操作装置10は、電源スイッチ12が操作されて電源が投入されると、操作装置10を安全に立ち上げる処理を実行する。また、操作装置10は、電源スイッチ12が操作されて電源が切られると、操作装置10を安全に終了する処理を実行する。物理ボタン13は、作業者からの入力操作を受ける複数の物理的なボタンで構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
23日前
川崎重工業株式会社
ロボット
今日
株式会社三協システム
製函機
21日前
CKD株式会社
把持装置
22日前
株式会社三協システム
移載装置
20日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボット操作装置
28日前
太陽パーツ株式会社
アシストスーツ
23日前
株式会社ミクロブ
把持装置
22日前
日本精工株式会社
締結用工具
1か月前
SMC株式会社
着脱装置
21日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
移動ロボットシステム
2日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
ロボットシステム
20日前
株式会社不二越
エッジ仕上げ装置
12日前
本田技研工業株式会社
装置
5日前
株式会社不二越
ロボットシステム
23日前
株式会社不二越
垂直多関節ロボット
13日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
26日前
ダイハツ工業株式会社
移載治具
1か月前
大和ハウス工業株式会社
ねじ回転工具
21日前
シンフォニアテクノロジー株式会社
搬送装置
2日前
株式会社不二越
協働ロボットシステム
2か月前
ライオン株式会社
移載システム
14日前
株式会社清水製作所
電動工具の吊下げ具
2か月前
株式会社不二越
ロボットシステム
1か月前
シヤチハタ株式会社
マーキング装置
26日前
シヤチハタ株式会社
マーキング装置
26日前
セイコーエプソン株式会社
ロボット
21日前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
1か月前
コネクテッドロボティクス株式会社
保持システム
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
12日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ