TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025122771
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018401
出願日
2024-02-09
発明の名称
ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250815BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】小さなスペースで効率よく作業を行うことが可能な、ロボットを提供する。
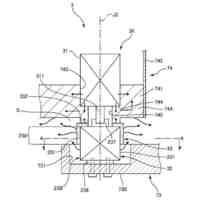
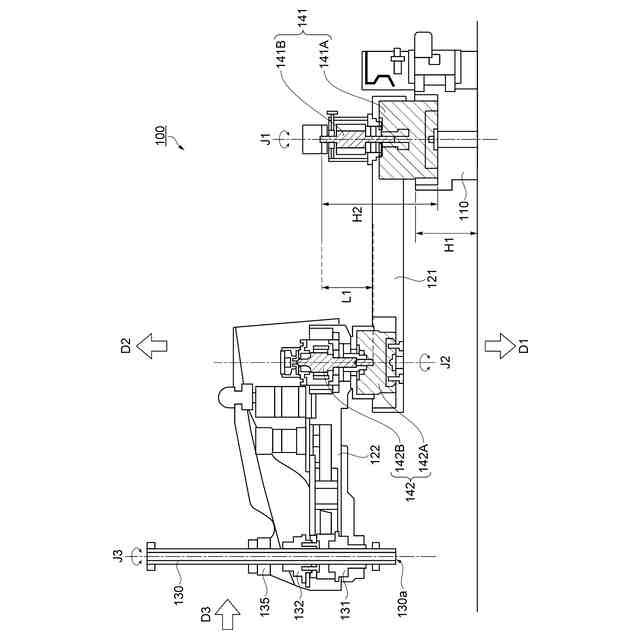
【解決手段】基台110と、第1アーム121と、第2アーム122と、を有し、第1関節部141は、第1モーター141Bと第1減速機141Aとを備え、第2関節部142は、第2モーター142Bと第2減速機142Aとを備え、第1方向及び第2方向と直交する第3方向から第1アーム121を見たとき、第1モーター141B及び第2モーター142Bは、第1方向又は第2方向のうち同じ側に配置されている。
【選択図】図2
特許請求の範囲
【請求項1】
基台と、
前記基台に第1関節部を介して接続され、第1回転軸周りに回転する第1アームと、
前記第1アームに第2関節部を介して接続され、第2回転軸周りに回転する第2アームと、を有し、
前記第1回転軸及び前記第2回転軸は、第1方向と、前記第1方向とは反対側の第2方向に沿っており、
前記第1関節部は第1モーターを備え、
前記第2関節部は第2モーターを備え、
前記第1モーター及び前記第2モーターは、前記第1アームに対して、前記第1方向又は前記第2方向のうち同じ側に配置されている、ロボット。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のロボットであって、
前記第1方向及び前記第2方向と直交し、前記第1アームが伸びる方向を第3方向とし、
前記第1モーター及び前記第2モーターは、前記第3方向から前記第1モーター及び前記第2モーターを見たとき、少なくとも一部が重なって配置されている、ロボット。
【請求項3】
請求項1に記載のロボットであって、
前記第1関節部は、前記第1モーターから駆動力を受ける第1減速機を有し、
前記同じ側は、前記第1アームに対し前記基台と逆側であり、
前記第1減速機の出力側は、前記基台に収容され、
前記第1減速機の入力側、及び、前記第1モーターの一部は、前記第1アームに収容されている、ロボット。
【請求項4】
請求項3に記載のロボットであって、
前記基台の高さは、前記第1減速機から前記第1モーターまでの高さよりも低い、ロボット。
【請求項5】
請求項3に記載のロボットであって、
前記第2関節部は、前記第2モーターから駆動力を受ける第2減速機を有し、
前記第1減速機及び前記第2減速機は、遊星歯車減速機である、ロボット。
【請求項6】
請求項3に記載のロボットであって、
前記第2関節部は、前記第2モーターに取付けられた第2減速機を有し、
前記第1減速機は、遊星歯車減速機であり、
前記第2減速機は、波動歯車減速機である、ロボット。
【請求項7】
請求項1に記載のロボットであって、
前記第1関節部は、前記第1モーターに取付けられた第1減速機を有し、
前記同じ側は、前記第1アームに対して前記基台側であって、
前記第1減速機の出力側は、前記第1アームに収容され、
前記第1減速機の入力側、及び、前記第1モーターは、前記基台に収容され、
前記第2アームは、前記第1アームに対して前記基台側に配置されている、ロボット。
【請求項8】
請求項7に記載のロボットであって、
前記第1モーター及び前記第2モーターは、第3方向から前記第1モーター及び前記第2モーターを見たとき、少なくとも一部が重なって配置されている、ロボット。
【請求項9】
請求項7に記載のロボットであって、
前記第2関節部は、前記第2モーターに取付けられた第2減速機を有し、
前記第1減速機および前記第2減速機は、遊星歯車減速機である、ロボット。
【請求項10】
請求項7に記載のロボットであって、
前記第2関節部は、前記第2モーターに取付けられた第2減速機を有し、
前記第1減速機は、遊星歯車減速機であり、
前記第2減速機は、波動歯車減速機である、ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、モーターと減速機とを有し第1のアームを支持する第1のアーム用駆動装置と、モーターと減速機とを有し第2のアームを支持する第2のアーム用駆動装置と、を備えたロボットの構成が開示されている。2つのモーターのうち一方のモーターは、第1のアームに対して、第2のアーム側に配置されている。他方のモーターは、第1のアームに対して、基台側に配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-307636号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の構成では、2つのモーターが第1のアームに対して異なる方向に配置されているため、2つのモーターと接続される第1のアーム及び第2のアームを含むロボット全体の高さが高くなる。言い換えれば、作業環境によって狭いスペースで作業を行うような場合、ロボットの全高を低くしたいという要望がある。
【課題を解決するための手段】
【0005】
ロボットは、基台と、前記基台に第1関節部を介して接続され、第1回転軸周りに回転する第1アームと、前記第1アームに第2関節部を介して接続され、第2回転軸周りに回転する第2アームと、を有し、前記第1回転軸及び前記第2回転軸は、第1方向と、前記第1方向とは反対側の第2方向に沿っており、前記第1関節部は第1モーターを備え、前記第2関節部は第2モーターを備え、前記第1モーター及び前記第2モーターは、前記第1アームに対して、前記第1方向又は前記第2方向のうち同じ側に配置されている。
【図面の簡単な説明】
【0006】
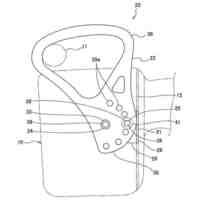
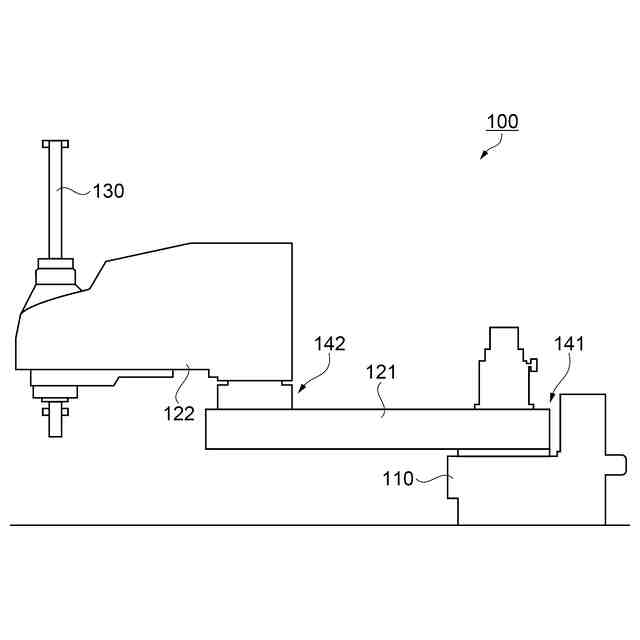
第1実施形態のロボットの構成を示す側面図。
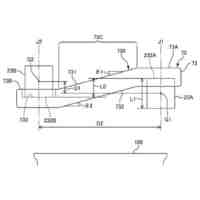
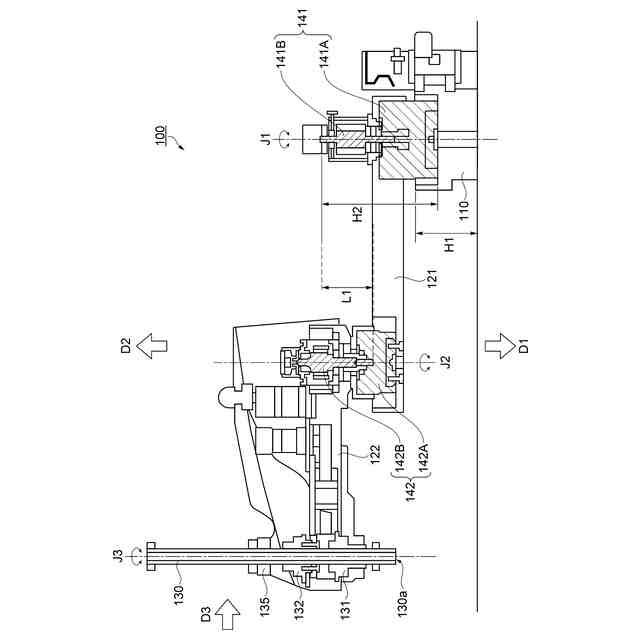
ロボットの内部構造を示す断面図。
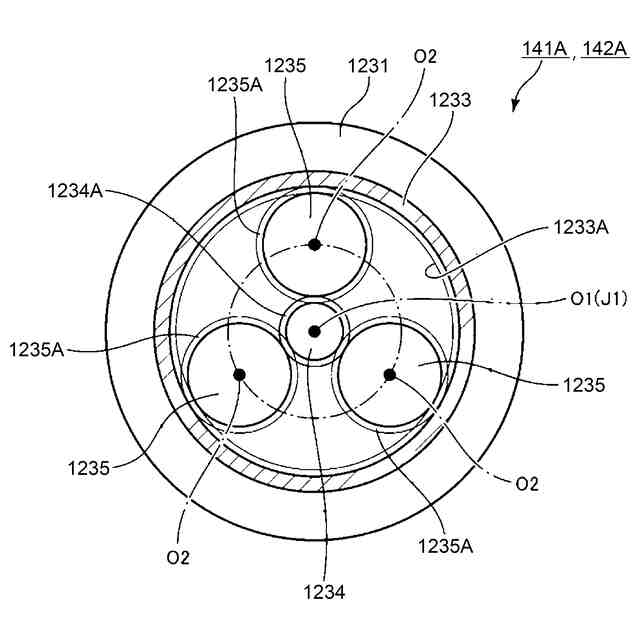
遊星歯車減速機の構成を示す平面図。
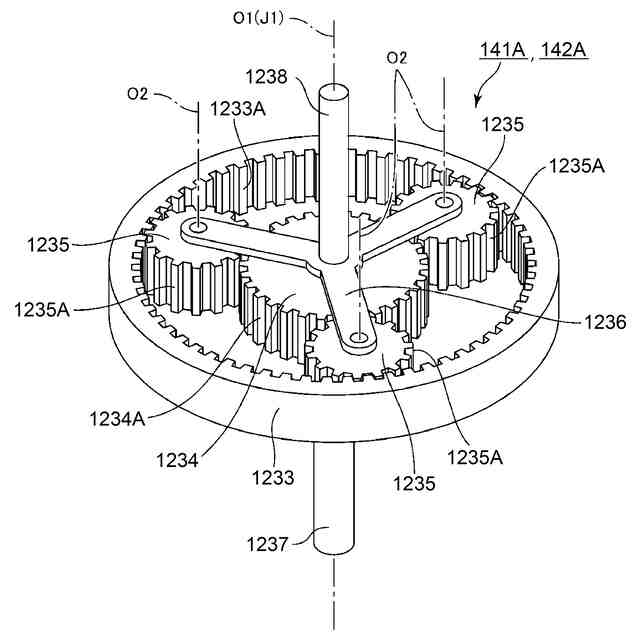
遊星歯車減速機の構成を示す斜視図。
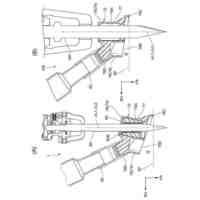
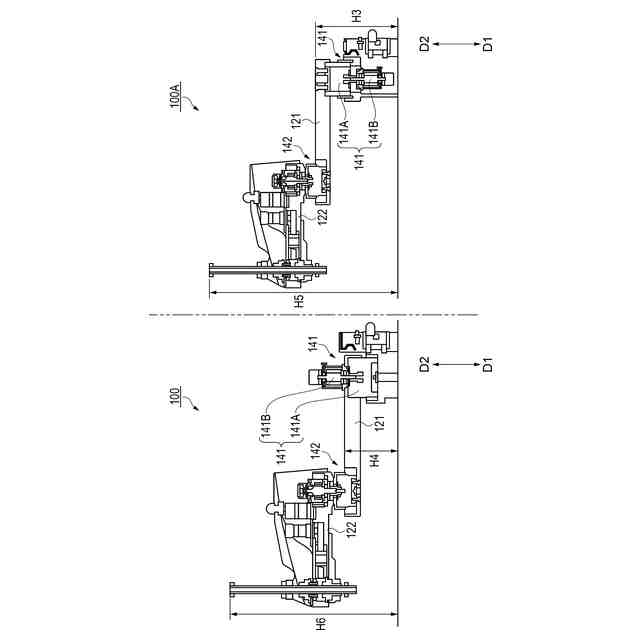
2台のロボットの全高を比較して示す断面図。
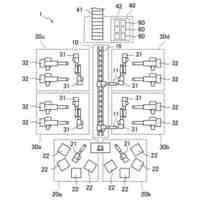
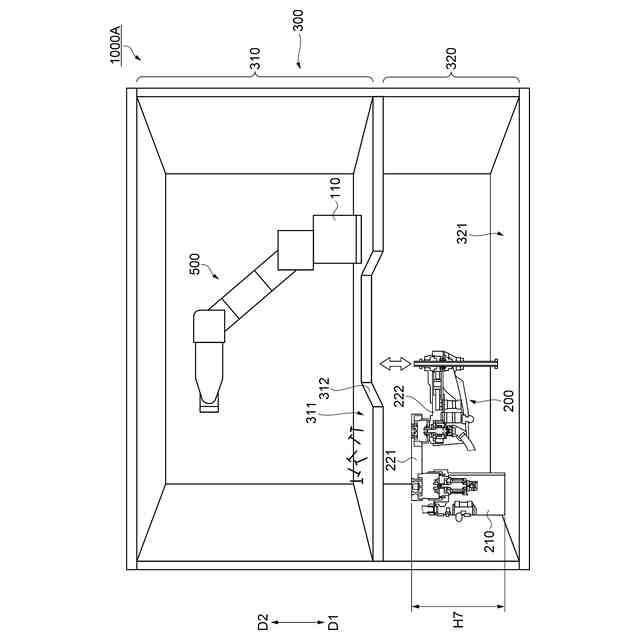
ロボットの作業状態を示す概略図。
第2実施形態のロボットの構成を示す断面図。
ロボットの作業状態を示す概略図。
【発明を実施するための形態】
【0007】
図1を参照しながら、第1実施形態のロボット100の構成を説明する。なお、図1における上下方向は、鉛直方向と一致しており、図1の上側を「上」、下側を「下」とも言う。
【0008】
図1に示すように、第1実施形態のロボット100は、例えば、電子部品等のワークの保持、ネジ締め、搬送、組立、加工、塗装、及び検査等の各作業(以下、これらを総称して「作業」と言う。)で用いられる。ただし、作業の種類等は、特に限定されない。
【0009】
ロボット100は、スカラロボットである。ロボット100は、基台110と、基台110に連結される第1アーム121と、第1アーム121に連結される第2アーム122と、を有する。第2アーム122の先端部には、鉛直方向に可動するシャフト130が配置されている。
【0010】
基台110と第1アーム121とは、第1関節部141を介して連結されている。第1アーム121と第2アーム122とは、第2関節部142を介して連結されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
10日前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
株式会社ダイヘン
搬送装置
2か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社不二越
ロボットシステム
4日前
日本精工株式会社
締結用工具
7日前
川崎重工業株式会社
ロボット
1か月前
ARMA株式会社
ジョイントフレーム
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
カプラ接続治具
14日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
26日前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
5日前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
2か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
20日前
セイコーエプソン株式会社
ロボット
4日前
セイコーエプソン株式会社
ロボット
10日前
セイコーエプソン株式会社
ロボット
今日
コネクテッドロボティクス株式会社
保持システム
28日前
川崎重工業株式会社
作業設備
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
タイガー産業株式会社
アタッチメント
18日前
セコム株式会社
ロボット
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ