TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149371
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049974
出願日
2024-03-26
発明の名称
位置推定システム、位置推定方法、及び位置推定プログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
5/02 20100101AFI20251001BHJP(測定;試験)
要約
【課題】通信機が3台未満であっても対象端末の位置を推定できる位置推定システム、位置推定方法、及び位置推定プログラムを提供する。
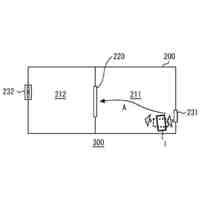
【解決手段】位置推定システム(1)は、第1の対象端末(100A)と、通信機(120)との間の第1の三次元距離を測定する第1の測距部(102)と、第2の対象端末(102B)と通信機(120)との間の第2の三次元距離を測定する第2の測距部と、第1の三次元距離を、第1の二次元距離に変換し、第2の三次元距離を、第2の二次元距離に変換し、軌道に対する第1の対象端末(100A)の移動方向と、第1の二次元距離と、第2の二次元距離とに基づいて、軌道を第1の軸、及び、第1の軸に直交する第2の軸からなる二次元における座標系における第1の対象端末(100A)の位置を推定する位置推定部(142)と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
水平面に投影した場合に予め定められた軌道に対して垂直に配置されると共に前記軌道に沿って移動する第1の対象端末に設けられ、前記第1の対象端末と、移動方向における前記第1の対象端末の前方に設置された通信機との間の三次元における距離である第1の三次元距離を測定する第1の測距部と、
前記水平面に投影した場合に前記第1の対象端末と所定の距離を保った状態で、前記軌道に対して垂直に配置されると共に前記軌道に沿って移動する第2の対象端末に設けられ、前記第2の対象端末と前記通信機との間の三次元における距離である第2の三次元距離を測定する第2の測距部と、
前記第1の対象端末が存在する位置の高さを示す第1の対象端末高さと、前記通信機が存在する位置の高さを示す通信機高さとに基づいて、前記第1の三次元距離を、前記水平面における二次元の距離である第1の二次元距離に変換し、前記第2の対象端末が存在する位置の高さを示す第2の対象端末高さと、前記通信機高さとに基づいて、前記第2の三次元距離を、前記水平面における二次元の距離である第2の二次元距離に変換し、前記軌道に対する前記第1の対象端末の移動方向と、前記第1の二次元距離と、前記第2の二次元距離とに基づいて、前記軌道を第1の軸、及び、前記第1の軸に直交する第2の軸からなる二次元における座標系における前記第1の対象端末の位置を推定する位置推定部と、
を備えることを特徴とする位置推定システム。
続きを表示(約 2,300 文字)
【請求項2】
前記推定された位置が、前記座標系において予め定められたエリアである期待エリア内に含まれるか否かを判定する存在判定部をさらに備えること
を特徴とする請求項1に記載の位置推定システム。
【請求項3】
前記第1の測距部は、前記通信機と、前記第1の対象端末との間の三次元における距離である第3の三次元距離と、前記通信機と異なる前記第1の対象端末の前方の位置に設けられた他の通信機と、前記第1の対象端末との間の三次元における距離である第4の三次元距離とを測定し、
前記第2の測距部は、前記通信機と、前記第2の対象端末との間の三次元における距離である第5の三次元距離と、前記他の通信機と、前記第2の対象端末との間の三次元における距離である第6の三次元距離とを測定し、
前記位置推定部は、前記第3の三次元距離、前記第4の三次元距離、前記第5の三次元距離、及び前記第6の三次元距離の各々を、第3の二次元距離、第4の二次元距離、第5の二次元距離、及び第6の二次元距離に変換し、
前記第3の二次元距離と前記第5の二次元距離とに基づいて推定した前記第1の対象端末の第1の位置から前記所定の距離にある前記第2の対象端末の第1の位置を推定し、前記第4の二次元距離と前記第6の二次元距離とに基づいて推定した前記第1の対象端末の第2の位置から前記所定の距離にある前記第2の対象端末の第2の位置を推定し、
前記第1の対象端末の第2の位置と前記通信機との距離である第1の検算距離、前記第2の対象端末の第2の位置と前記通信機との距離である第2の検算距離、前記第1の対象端末の第1の位置と前記他の通信機との距離である第3の検算距離、及び前記第2の対象端末の第1の位置と前記他の通信機との距離である第4の検算距離の各々を算出し、
前記第1の検算距離と前記第3の二次元距離とで第1の検算判定を、前記第2の検算距離と前記第5の二次元距離とで第2の検算判定を、前記第3の検算距離と前記第4の二次元距離とで第3の検算判定を、前記第4の検算距離と前記第6の二次元距離とで第4の検算判定を各々行い、前記第1の検算判定、前記第2の検算判定、前記第3の検算判定、及び前記第4の検算判定の各々の判定結果に基づいて前記第1の対象端末の第1の位置、及び前記第1の対象端末の第2の位置のいずれか一方を、誤差を含まない位置として推定する誤差推定部をさらに備えること
を特徴とする請求項2に記載の位置推定システム。
【請求項4】
コンピュータによって実行される位置算出方法であって、
水平面に投影した場合に予め定められた軌道に対して垂直に配置されると共に前記軌道に沿って移動する第1の対象端末と、移動方向における前記第1の対象端末の前方に設置された通信機との間の三次元における距離である第1の三次元距離を測定するステップと、
前記水平面に投影した場合に前記第1の対象端末と所定の距離を保った状態で、前記軌道に対して垂直に配置されると共に前記軌道に沿って移動する第2の対象端末と前記通信機との間の三次元における距離である第2の三次元距離を測定するステップと、
前記第1の対象端末が存在する位置の高さを示す第1の対象端末高さと、前記通信機が存在する位置の高さを示す通信機高さとに基づいて、前記第1の三次元距離を、前記水平面における二次元の距離である第1の二次元距離に変換するステップと、
前記第2の対象端末が存在する位置の高さを示す第2の対象端末高さと、前記通信機高さとに基づいて、前記第2の三次元距離を、前記水平面における二次元の距離である第2の二次元距離に変換するステップと、
前記軌道に対する前記第1の対象端末の移動方向と、前記第1の二次元距離と、前記第2の二次元距離とに基づいて、前記軌道を第1の軸、及び、前記第1の軸に直交する第2の軸からなる二次元における座標系における前記第1の対象端末の位置を推定するステップと、
を有する位置推定方法。
【請求項5】
水平面に投影した場合に予め定められた軌道に対して垂直に配置されると共に前記軌道に沿って移動する第1の対象端末と、移動方向における前記第1の対象端末の前方に設置された通信機との間の三次元における距離である第1の三次元距離を測定するステップと、
前記水平面に投影した場合に前記第1の対象端末と所定の距離を保った状態で、前記軌道に対して垂直に配置されると共に前記軌道に沿って移動する第2の対象端末と前記通信機との間の三次元における距離である第2の三次元距離を測定するステップと、
前記第1の対象端末が存在する位置の高さを示す第1の対象端末高さと、前記通信機が存在する位置の高さを示す通信機高さとに基づいて、前記第1の三次元距離を、前記水平面における二次元の距離である第1の二次元距離に変換するステップと、
前記第2の対象端末が存在する位置の高さを示す第2の対象端末高さと、前記通信機高さとに基づいて、前記第2の三次元距離を、前記水平面における二次元の距離である第2の二次元距離に変換するステップと、
前記軌道に対する前記第1の対象端末の移動方向と、前記第1の二次元距離と、前記第2の二次元距離とに基づいて、前記軌道を第1の軸、及び、前記第1の軸に直交する第2の軸からなる二次元における座標系における前記第1の対象端末の位置を推定するステップと、
をコンピュータに実行させる位置推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置推定システム、位置推定方法、及び位置推定プログラムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
特許文献1には、対象端末の三次元位置を推定するシステムとして、対象端末との距離を、UWB(Ultra Wide Band)を用いた無線信号によって測距可能な4台の通信機を用いるシステムが開示されている。かかるシステムは、対象端末と、少なくとも3台以上の通信機との間の距離から対象端末の三次元位置を算出する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/031550号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術は、三次元位置を推定するため、対象端末との距離が確保された少なくとも3台以上の通信機を要する。対象端末との距離が確保された状態で通信機を設置できる場所は限られるので、対象端末との距離を測定可能な3台以上の通信機を設置できない状況では、対象端末の三次元位置を推定することができないという問題点があった。
【0005】
本開示は、通信機が3台未満であっても対象端末の位置を推定できる位置推定システム、位置推定方法、及び位置推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の位置推定システムは、水平面に投影した場合に予め定められた軌道に対して垂直に配置されると共に前記軌道に沿って移動する第1の対象端末に設けられ、前記第1の対象端末と、移動方向における前記第1の対象端末の前方に設置された通信機との間の三次元における距離である第1の三次元距離を測定する第1の測距部と、前記水平面に投影した場合に前記第1の対象端末と所定の距離を保った状態で、前記軌道に対して垂直に配置されると共に前記軌道に沿って移動する第2の対象端末に設けられ、前記第2の対象端末と前記通信機との間の三次元における距離である第2の三次元距離を測定する第2の測距部と、前記第1の対象端末が存在する位置の高さを示す第1の対象端末高さと、前記通信機が存在する位置の高さを示す通信機高さとに基づいて、前記第1の三次元距離を、前記水平面における二次元の距離である第1の二次元距離に変換し、前記第2の対象端末が存在する位置の高さを示す第2の対象端末高さと、前記通信機高さとに基づいて、前記第2の三次元距離を、前記水平面における二次元の距離である第2の二次元距離に変換し、前記軌道に対する前記第1の対象端末の移動方向と、前記第1の二次元距離と、前記第2の二次元距離とに基づいて、前記軌道を第1の軸、及び、前記第1の軸に直交する第2の軸からなる二次元における座標系における前記第1の対象端末の位置を推定する位置推定部と、を備える。
【0007】
本開示の位置推定方法は、コンピュータによって実行される位置算出方法であって、
水平面に投影した場合に予め定められた軌道に対して垂直に配置されると共に前記軌道に沿って移動する第1の対象端末と、移動方向における前記第1の対象端末の前方に設置された通信機との間の三次元における距離である第1の三次元距離を測定するステップと、前記水平面に投影した場合に前記第1の対象端末と所定の距離を保った状態で、前記軌道に対して垂直に配置されると共に前記軌道に沿って移動する第2の対象端末と前記通信機との間の三次元における距離である第2の三次元距離を測定するステップと、前記第1の対象端末が存在する位置の高さを示す第1の対象端末高さと、前記通信機が存在する位置の高さを示す通信機高さとに基づいて、前記第1の三次元距離を、前記水平面における二次元の距離である第1の二次元距離に変換するステップと、前記第2の対象端末が存在する位置の高さを示す第2の対象端末高さと、前記通信機高さとに基づいて、前記第2の三次元距離を、前記水平面における二次元の距離である第2の二次元距離に変換するステップと、前記軌道に対する前記第1の対象端末の移動方向と、前記第1の二次元距離と、前記第2の二次元距離とに基づいて、前記軌道を第1の軸、及び、前記第1の軸に直交する第2の軸からなる二次元における座標系における前記第1の対象端末の位置を推定するステップと、を有する。
【0008】
本開示の位置推定プログラムは、水平面に投影した場合に予め定められた軌道に対して垂直に配置されると共に前記軌道に沿って移動する第1の対象端末と、移動方向における前記第1の対象端末の前方に設置された通信機との間の三次元における距離である第1の三次元距離を測定するステップと、前記水平面に投影した場合に前記第1の対象端末と所定の距離を保った状態で、前記軌道に対して垂直に配置されると共に前記軌道に沿って移動する第2の対象端末と前記通信機との間の三次元における距離である第2の三次元距離を測定するステップと、前記第1の対象端末が存在する位置の高さを示す第1の対象端末高さと、前記通信機が存在する位置の高さを示す通信機高さとに基づいて、前記第1の三次元距離を、前記水平面における二次元の距離である第1の二次元距離に変換するステップと、前記第2の対象端末が存在する位置の高さを示す第2の対象端末高さと、前記通信機高さとに基づいて、前記第2の三次元距離を、前記水平面における二次元の距離である第2の二次元距離に変換するステップと、前記軌道に対する前記第1の対象端末の移動方向と、前記第1の二次元距離と、前記第2の二次元距離とに基づいて、前記軌道を第1の軸、及び、前記第1の軸に直交する第2の軸からなる二次元における座標系における前記第1の対象端末の位置を推定するステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、通信機が3台未満であっても対象端末の位置を推定できる位置推定システム、位置推定方法、及び位置推定プログラムを提供することが可能となる。
【図面の簡単な説明】
【0010】
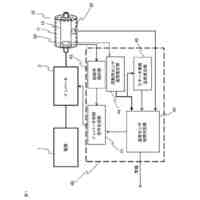
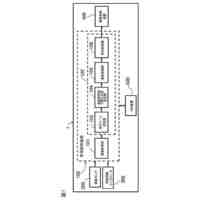
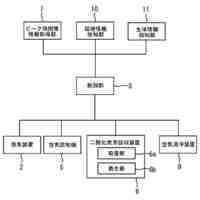
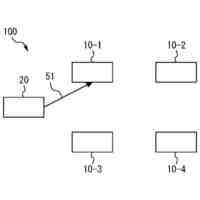
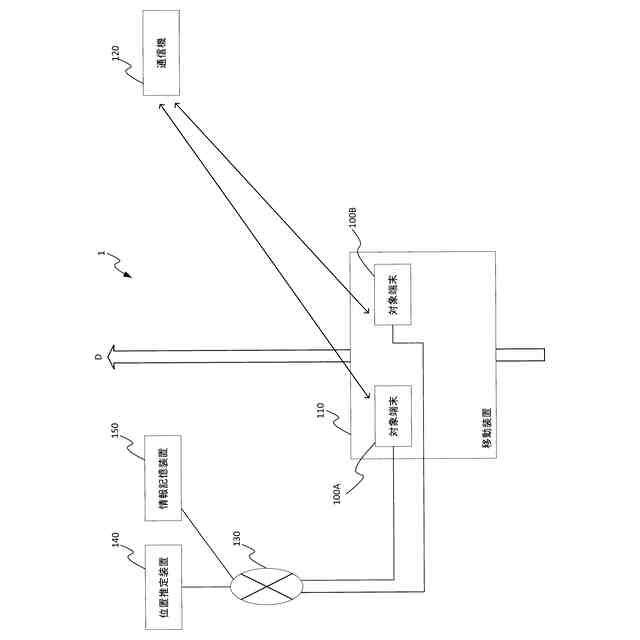
実施の形態1に係る位置推定システムの構成を概略的に示すブロック図である。
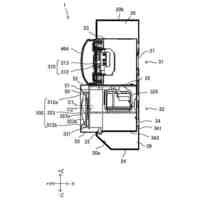
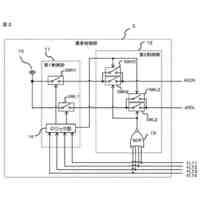
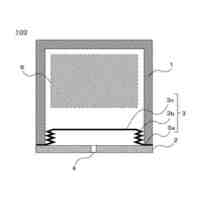
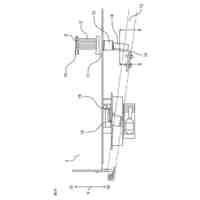
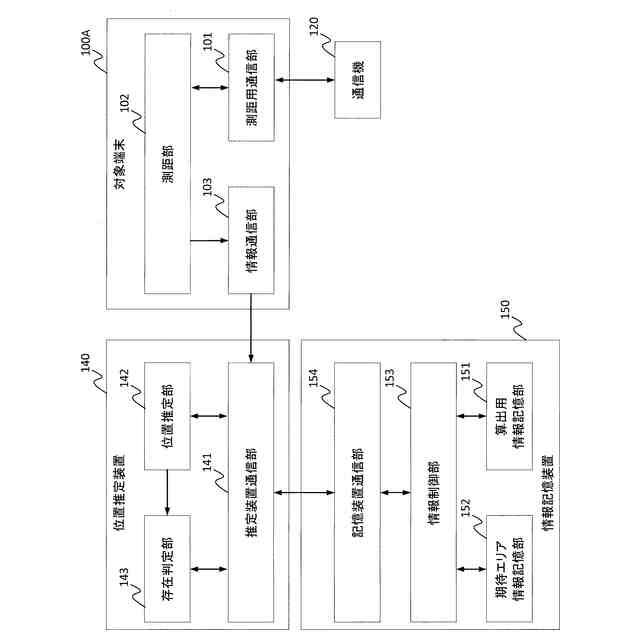
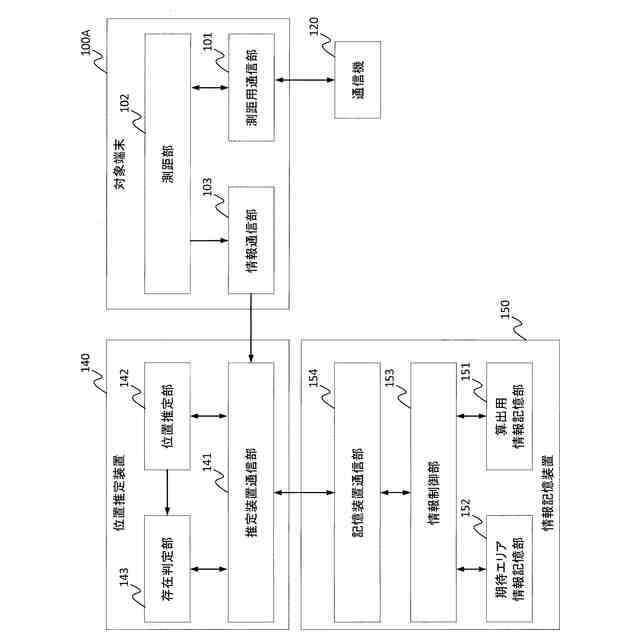
実施の形態1に係る対象端末、位置推定装置及び情報記憶装置の構成を概略的に示すブロック図である。
(A)及び(B)は、ハードウェア構成例を示すブロック図である。
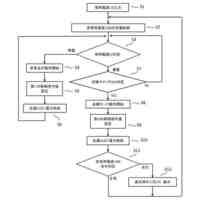
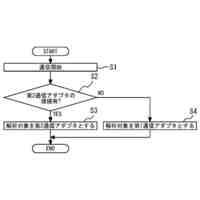
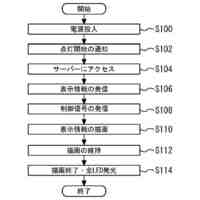
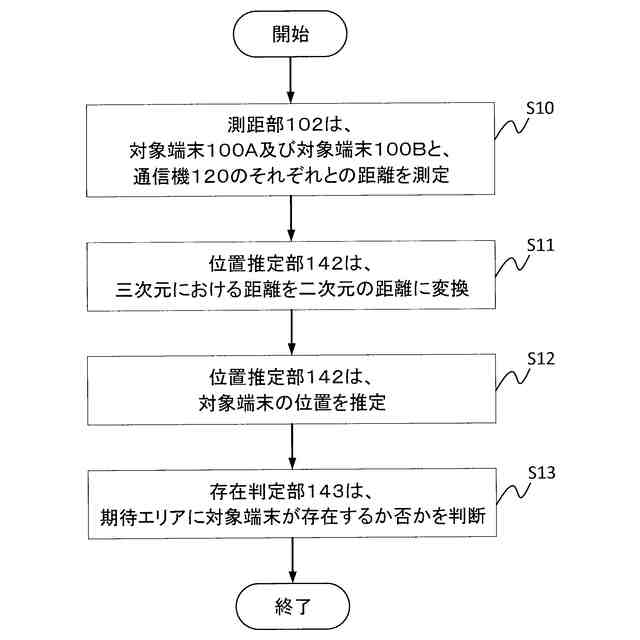
実施の形態1に係る位置推定システムにより、対象端末が特定エリアに存在するか否かを判定する動作を示すフローチャートである。
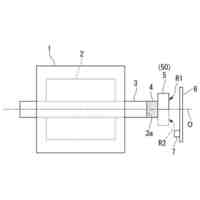
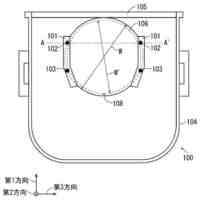
三次元距離を二次元距離に変換する処理を説明するための概略図である。
対象端末の位置を推定する処理を説明するための概略図である。
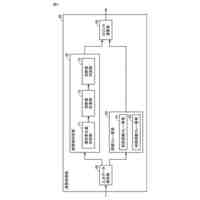
実施の形態2に係る位置推定システムの構成を概略的に示すブロック図である。
実施の形態2に係る対象端末、位置推定装置及び情報記憶装置の構成を概略的に示すブロック図である。
実施の形態2に係る位置推定システムにより、対象端末が特定エリアに存在するか否かを判定する動作を示すフローチャートである。
(A)及び(B)は、対象端末の誤差を含む位置を推定する処理を説明するための概略図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
回転電機
1か月前
三菱電機株式会社
回転電機
11日前
三菱電機株式会社
照明装置
21日前
三菱電機株式会社
回転電機
21日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
加熱調理器
14日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
15日前
三菱電機株式会社
給湯システム
14日前
三菱電機株式会社
回転電機装置
1か月前
三菱電機株式会社
照明システム
1日前
三菱電機株式会社
貯湯式給湯機
11日前
三菱電機株式会社
空気調和装置
22日前
三菱電機株式会社
ネジ取出機構
22日前
三菱電機株式会社
電力変換装置
21日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
車両制御装置
23日前
三菱電機株式会社
電動機制御装置
7日前
三菱電機株式会社
非常用照明装置
14日前
三菱電機株式会社
送電線保護装置
21日前
三菱電機株式会社
給湯機システム
1か月前
三菱電機株式会社
屋外設置用筐体
1か月前
三菱電機株式会社
風力発電システム
11日前
三菱電機株式会社
換気空調システム
11日前
三菱電機株式会社
変圧器の診断方法
29日前
三菱電機株式会社
照明制御システム
8日前
三菱電機株式会社
空気清浄システム
14日前
三菱電機株式会社
ウエハテスト装置
21日前
三菱電機株式会社
照明制御システム
21日前
三菱電機株式会社
情報処理システム
1か月前
三菱電機株式会社
電流切替型DAC
1日前
三菱電機株式会社
コントロールセンタ
21日前
三菱電機株式会社
半導体装置の製造方法
29日前
三菱電機株式会社
照明器具及び照明装置
21日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ