TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150302
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051114
出願日
2024-03-27
発明の名称
モデル画像登録方法、画像処理方法、並びに、容器搬送装置
出願人
靜甲株式会社
代理人
個人
主分類
G06T
7/00 20170101AFI20251002BHJP(計算;計数)
要約
【課題】 画像処理において参照するモデル画像を、作業現場において、画像処理のソフトウェアに習熟していない作業者であっても簡便に、しかも、コストをかけずに登録できるモデル画像登録方法と、前記モデル画像を用いた画像処理方法、並びに、前記画像処理方法を実行する容器搬送装置を提供する。
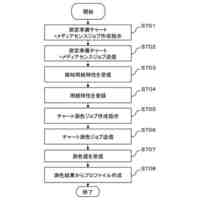
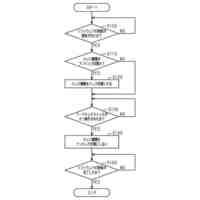
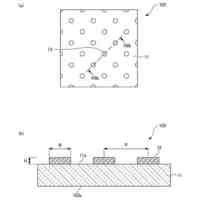
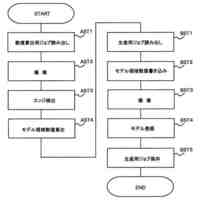
【解決手段】 ワークの撮像から前記ワークのエッジEを検出し、モデル画像を生成するための前記エッジEを含んだ矩形の画像領域を特定する少なくともX-Y座標幅とその基準となる始点座標の数値を算出する第1工程ASTと、前記ワークの撮像から前記数値に示す画像領域MAを切り取り、ワークの品種に対応するモデル画像として記憶部8に登録する第2工程BSTとを有する。
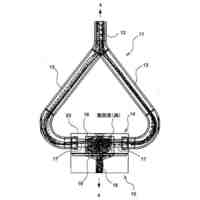
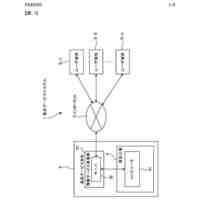
【選択図】 図2
特許請求の範囲
【請求項1】
ワークの識別用撮像から、モデル画像を用いて対象となるワークを識別し、識別された前記ワークに対して所定の作業処理を行う際に参照する前記モデル画像を記憶部に登録する方法であって、
前記ワークの撮像から前記ワークのエッジを検出し、前記モデル画像を生成するための前記エッジを含んだ矩形の画像領域を特定する少なくともX-Y座標とその基準となる始点座標の数値を算出する第1工程と、
前記ワークの撮像から前記数値に示す領域の画像を切り取り、前記ワークの品種に対応するモデル画像として前記記憶部に登録する第2工程と
を有することを特徴とするモデル画像登録方法。
続きを表示(約 990 文字)
【請求項2】
前記第1工程は、前記ワークを撮像する第1撮像工程、前記第1撮像工程で得られた撮像から前記ワークのエッジを検出する工程、前記モデル画像を生成するための前記エッジを含む矩形の画像領域を特定する少なくともX-Y座標の数値を算出するモデル領域算出工程を有し、
前記第2工程は、前記ワークを撮像する第2撮像工程、前記第2撮像工程で得られた撮像から前記数値に示す領域の画像を切り取り、前記ワークの品種に対応するモデル画像として前記メモリに登録するモデル登録工程と
を有することを特徴とする請求項1に記載のモデル画像登録方法。
【請求項3】
撮像装置によるワークの識別用撮像から、識別対象の前記ワークに対応する登録されたモデル画像を用いて対象となるワークを識別し、識別された前記ワークに対して所定の作業処理を行う際に実行される画像処理方法であって、
前記モデル画像は、請求項2に記載のモデル画像登録方法により登録された、識別対象のワークの横倒状態における2次元画像であり、前記識別用撮像は搬送経路上に横倒状態で搬送されるワークの撮像であり、
撮像装置の画像処理部は、前記作業処理の実行時に、前記モデル画像に基づいて前記識別用撮像内のワークの位置・姿勢を検出する画像処理を実行することを特徴とする画像処理方法。
【請求項4】
ワークの識別用撮像から、識別対象の前記ワークに対応する登録されたモデル画像を用いて対象となるワークを識別し、識別された前記ワークを所定の姿勢に整えて後続へ送り出す整列搬送プログラムを実行する生産装置としての容器搬送装置であって、
前記整列搬送プログラムの実行を指示する入力手段と、
前記ワークとしての容器を搬送経路上に搬送する搬送装置と、
前記搬送経路を搬送される容器の前記識別用撮像を取得可能に配設され、請求項3に記載の画像処理方法を実行する画像処理部を有する撮像装置と、
前記画像処理部において識別された容器を捕捉し、所定の姿勢に整えて後続へ送り出すピックアップロボットと、
前記整列搬送プログラムの実行時に前記搬送装置、前記撮像装置、前記ピックアップロボットの駆動を制御する制御装置と
を備えることを特徴とする容器搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル画像の登録方法と、前記モデル画像を利用した画像処理方法、並びに、撮像装置でワークを撮像し、その撮像中に予め登録されている前記ワークとしての容器のモデル画像と同一と判断される画像を認識して前記容器を特定し、搬送する容器搬送装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ワークの画像処理を介して、特定のピックアップや良否の検査などの処理が行われることがある。例えば、製品の製造ラインにおける搬送経路途中で、製品とされるワークをカメラ等の撮像装置で撮像し、その撮像中に予め登録されている該ワークのモデル画像と同一と判断された画像を認識して前記ワークを特定し、その特定されたワークに関する位置情報に従い、前記搬送経路を搬送されるワークをピックアップロボットでピックアップすることがある。
【0003】
また、ワークのモデル画像と、実際のワークの撮像との同一・類似性や差異を判断して、良品/不良品を振り分けることもある。
【0004】
このように、所定のワークの撮像を予め登録されているモデル画像と照合してワークを認識するためには、その作業・処理に先立って、モデル画像を画像処理装置内に登録する必要がある。
【0005】
つまり、先ず、モデル画像の登録を行ない(モデル画像の登録処理)、その後の特定の作業の実行時には、登録しておいたモデル画像を特定し、前記モデル画像を用いた画像処理に基づいて前記特定の作業を実行していた(画像処理による実作業)。
【先行技術文献】
【特許文献】
【0006】
特開2021-039457号公報
特開平9-12836号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来のモデル画像の登録処理は、モデル画像登録のための専用のソフトウェアを用いるため、該ソフトウェアの習熟が必要となり、製品の生産現場でのオペレータの教育に時間とコストを要する。
【0008】
また、モデル画像を登録するための環境も、専用のソフトウェアを用いるため、一般的なPLC(制御装置)やタッチパネルでは実行できず、専用の制御端末を追加したり、PLC自体を変更する必要があり、コストを要していた。
【0009】
そこで、本発明は、画像処理において参照するモデル画像を、作業現場において、画像処理のソフトウェアに習熟していない作業者であっても簡便に、しかも、コストをかけずに登録できるモデル画像登録方法と、前記モデル画像を用いた画像処理方法、並びに、前記画像処理方法を実行する容器搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
前述した目的を達成するため、本願のモデル画像登録方法は、ワークの識別用撮像から、モデル画像を用いて対象となるワークを識別し、識別された前記ワークに対して所定の作業処理を行う際に参照する前記モデル画像を記憶部に登録する方法であって、前記ワークの撮像から前記ワークのエッジを検出し、前記モデル画像を生成するための前記エッジを含んだ矩形の画像領域を特定する少なくともX-Y座標幅とその基準となる始点座標の数値を算出する第1工程と、 前記ワークの撮像から前記数値に示す領域の画像を切り取り、前記ワークの品種に対応するモデル画像として前記記憶部に登録する第2工程と、を有することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
靜甲株式会社
高圧損発生ユニット並びに充填装置
1か月前
靜甲株式会社
モデル画像登録方法、画像処理方法、並びに、容器搬送装置
15日前
個人
詐欺保険
10日前
個人
縁伊達ポイン
10日前
個人
地球保全システム
23日前
個人
QRコードの彩色
14日前
個人
残土処理システム
16日前
個人
農作物用途分配システム
9日前
個人
知的財産出願支援システム
17日前
個人
タッチパネル操作指代替具
3日前
個人
スケジュール調整プログラム
2日前
個人
携帯端末障害問合せシステム
2日前
株式会社キーエンス
受発注システム
22日前
株式会社キーエンス
受発注システム
22日前
個人
食品レシピ生成システム
22日前
株式会社キーエンス
受発注システム
22日前
個人
帳票自動生成型SaaSシステム
17日前
キヤノン株式会社
表示システム
22日前
個人
音声・通知・再配達UX制御構造
17日前
トヨタ自動車株式会社
通知装置
今日
キヤノン株式会社
印刷システム
2日前
エッグス株式会社
情報処理装置
3日前
大同特殊鋼株式会社
棒材計数方法
15日前
株式会社キーエンス
製品受発注システム
22日前
株式会社カネカ
製造工場の管理システム
17日前
個人
マーケティング活動支援装置
21日前
トヨタ自動車株式会社
車両
1日前
太陽誘電株式会社
表示装置
今日
TOTO株式会社
衛生評価システム
15日前
株式会社オカムラ
電力供給システム
14日前
株式会社PIPS
2次元可視コード
7日前
TOTO株式会社
姿勢評価システム
15日前
株式会社梓総合研究所
冷却システム
21日前
株式会社栗本鐵工所
触覚提示システム
15日前
日本電気株式会社
異常検知装置
1日前
ワキ製薬株式会社
配置薬管理システム
21日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ