TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158494
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061075
出願日
2024-04-04
発明の名称
廃棄物処理システム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B07C
5/342 20060101AFI20251009BHJP(固体相互の分離;仕分け)
要約
【課題】廃棄物をロボットにより効率よく仕分けることが可能な廃棄物処理システムを提供する。
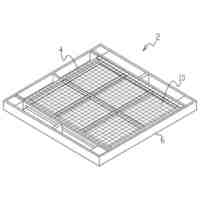
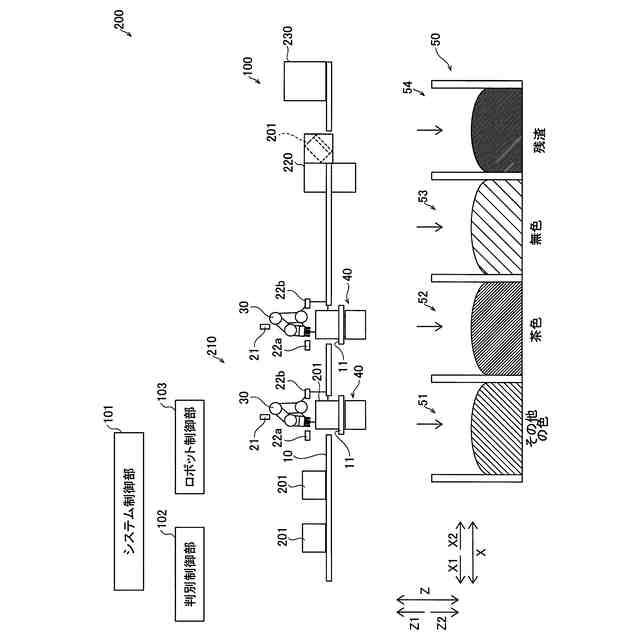
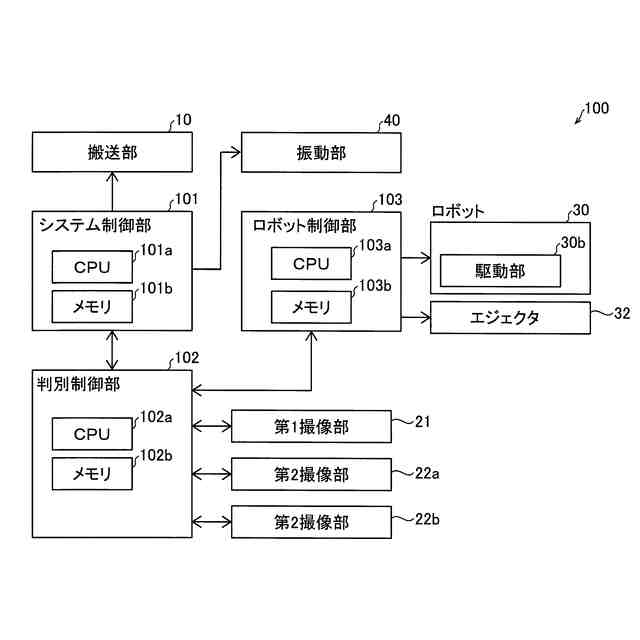
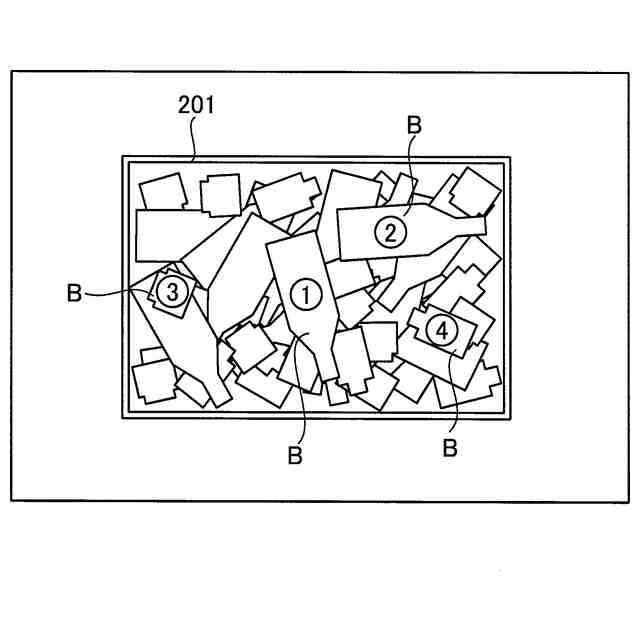
【解決手段】この廃棄物処理システム100は、複数種類の廃棄物が収容されたコンテナ201を搬送する搬送部10と、コンテナ201内の廃棄物を取り出して仕分けるロボット30と、搬送部10により搬送されたコンテナ201内の廃棄物、または、ロボット30によりコンテナ201から取り出された廃棄物を撮像する撮像部と、撮像部により撮像された廃棄物の画像に基づいて、廃棄物を判別して、ロボット30により廃棄物の仕分けを行わせる制御を行う制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
複数種類の廃棄物が収容されたコンテナを搬送する搬送部と、
前記コンテナ内の廃棄物を取り出して仕分けるロボットと、
前記搬送部により搬送された前記コンテナ内の廃棄物、または、前記ロボットにより前記コンテナから取り出された廃棄物を撮像する撮像部と、
前記撮像部により撮像された廃棄物の画像に基づいて、廃棄物を判別して、前記ロボットにより廃棄物の仕分けを行わせる制御を行う制御部と、を備える、廃棄物処理システム。
続きを表示(約 1,100 文字)
【請求項2】
前記ロボットは、前記搬送部により搬送されて停止した状態の前記コンテナ内の廃棄物を仕分ける、請求項1に記載の廃棄物処理システム。
【請求項3】
前記撮像部は、前記コンテナ内の廃棄物を撮像する第1撮像部を含み、
前記制御部は、前記第1撮像部により撮像した前記コンテナ内の廃棄物の画像に基づいて、前記ロボットにより前記コンテナ内から廃棄物を取り出す制御を行う、請求項1に記載の廃棄物処理システム。
【請求項4】
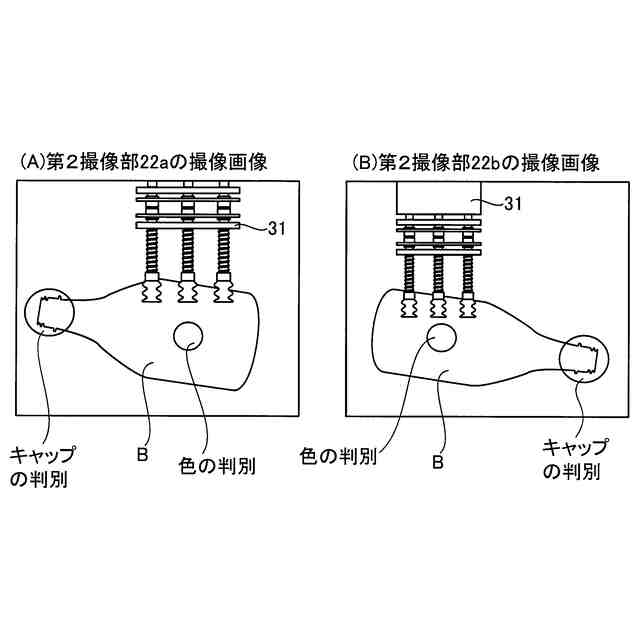
前記撮像部は、前記ロボットにより保持されて前記コンテナから取り出された廃棄物を撮像する第2撮像部を含み、
前記制御部は、前記第2撮像部により撮像した前記ロボットに保持された廃棄物の画像に基づいて、廃棄物の選別不適物が付いているか否かを判別して、前記ロボットにより前記コンテナ内の廃棄物の仕分けを行わせる制御を行う、請求項1に記載の廃棄物処理システム。
【請求項5】
前記制御部は、前記第2撮像部により撮像した廃棄物の画像に基づいて、キャップ、栓、異物、汚れおよび内容物のうち少なくとも1つを含む前記選別不適物が廃棄物としての容器に付いているか否かを判別する、請求項4に記載の廃棄物処理システム。
【請求項6】
前記第2撮像部は、前記コンテナから取り出された廃棄物を互いに異なる方向から撮像する、複数のカメラを含み、
前記制御部は、前記第2撮像部の前記複数のカメラの撮像結果に基づいて、廃棄物に前記選別不適物が付いているか否かを判別する、請求項4に記載の廃棄物処理システム。
【請求項7】
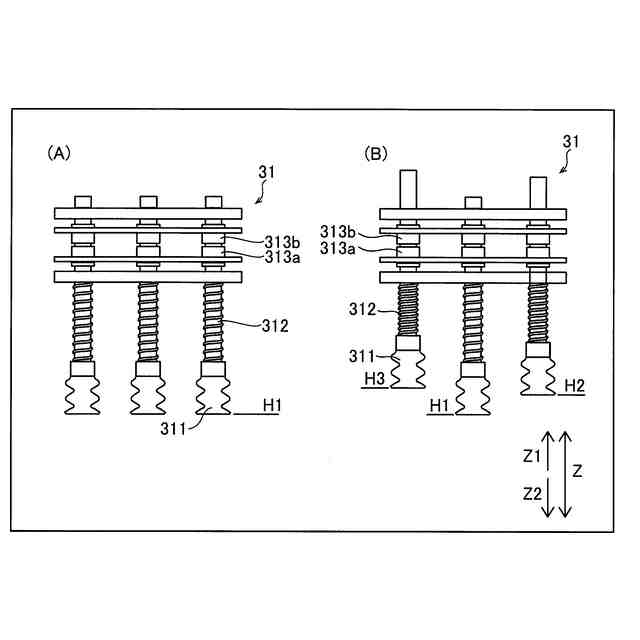
前記ロボットは、ロボットアームと、前記ロボットアームの先端に接続され、廃棄物を吸着する複数の吸着パッドを有する吸着ハンドと、を含み、
前記吸着ハンドは、前記複数の吸着パッドの吸着高さ位置を互いに独立して固定する固定部を有する、請求項1に記載の廃棄物処理システム。
【請求項8】
前記制御部は、前記吸着ハンドによる廃棄物の吸着を失敗した場合に、吸着対象の廃棄物を切り替える制御を行う、請求項7に記載の廃棄物処理システム。
【請求項9】
前記制御部は、前記吸着ハンドによる廃棄物の吸着を連続して失敗した場合に、前記コンテナを振動させる制御を行う、請求項7に記載の廃棄物処理システム。
【請求項10】
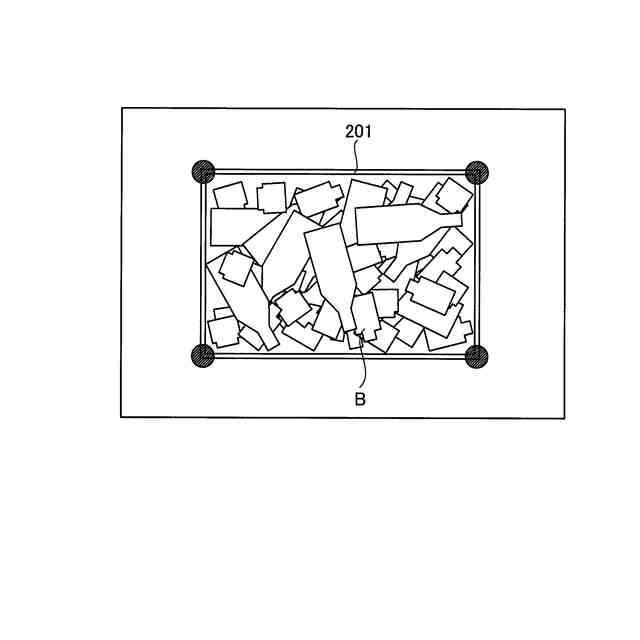
前記制御部は、前記第1撮像部により撮像した前記コンテナの画像に基づいて、前記コンテナの外周部を取得して、前記ロボットの動作範囲を設定する、請求項3に記載の廃棄物処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
廃棄物処理システムに関し、特に、廃棄物の仕分けを行うロボットを備える廃棄物処理システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、廃棄物の仕分けを行うロボットを備える廃棄物処理システムが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、複数種類の廃棄物を搬送するベルトコンベアと、ベルトコンベア上の廃棄物を仕分けるロボットとを備える廃棄物選別装置(廃棄物処理システム)が開示されている。この特許文献1の廃棄物選別装置では、ベルトコンベアの上方から仕分けられる廃棄物が投入されて供給される。
【先行技術文献】
【特許文献】
【0004】
特開2021-137738号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1の廃棄物選別装置(廃棄物処理システム)では、上記のように、ベルトコンベアの上方から仕分けられる廃棄物が投入されて供給される。このため、廃棄物がベルトコンベアに投入された際の衝撃に起因して割れた場合には、廃棄物が仕分けにくくなるという不都合がある。その結果、ロボットによる廃棄物の回収率が減るという問題点がある。
【0006】
上記のような課題を解決するためになされたものであり、1つの目的は、割れの少ない状態で廃棄物をロボットにより仕分けることが可能で、回収率が上がり、資源化率を向上することが可能な廃棄物処理システムを提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、一の局面による廃棄物処理システムは、複数種類の廃棄物が収容されたコンテナを搬送する搬送部と、コンテナ内の廃棄物を取り出して仕分けるロボットと、搬送部により搬送されたコンテナ内の廃棄物、または、ロボットによりコンテナから取り出された廃棄物を撮像する撮像部と、撮像部により撮像された廃棄物の画像に基づいて、廃棄物を判別して、ロボットにより廃棄物の仕分けを行わせる制御を行う制御部と、を備える。
【0008】
一の局面による廃棄物処理システムでは、上記のように構成することにより、廃棄物が収容されたコンテナから廃棄物を直接取り出して仕分けられることから、コンベアに廃棄物を投入してからコンベア上の廃棄物を仕分ける場合と異なり、投入に起因する衝撃が廃棄物に加わることを抑制することができる。その結果、廃棄物が割れることを抑制できるため、廃棄物の割れに起因して廃棄物が仕分けにくくなることを抑制することができる。これにより、割れの少ない状態で廃棄物をロボットにより仕分けることができるとともに、回収率が上がり、資源化率を向上することができる。
【発明の効果】
【0009】
上記のように、割れの少ない状態で廃棄物をロボットにより仕分けることができるとともに、回収率が上がり、資源化率を向上することができる。
【図面の簡単な説明】
【0010】
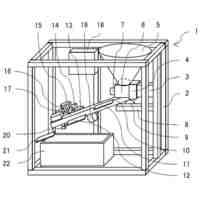
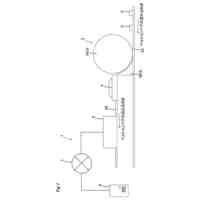
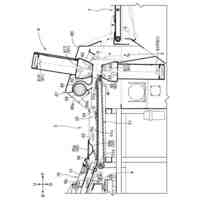
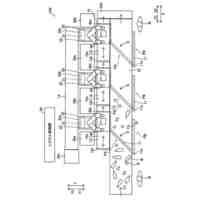
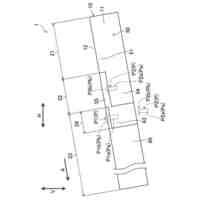
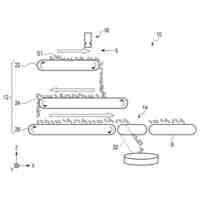
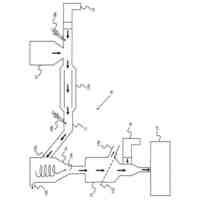
一実施形態による廃棄物処理システムが設けられた廃棄物処理施設の全体構成を示した図である。
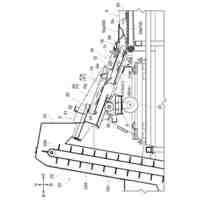
一実施形態による廃棄物処理システムの概略を示した平面図である。
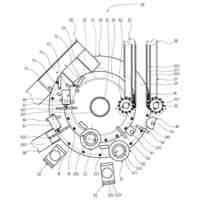
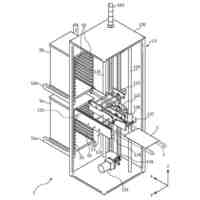
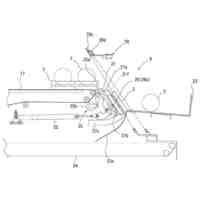
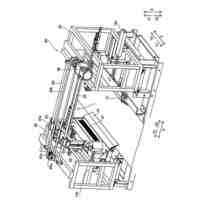
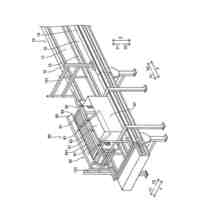
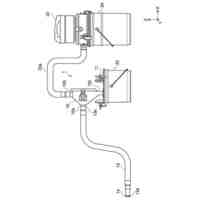
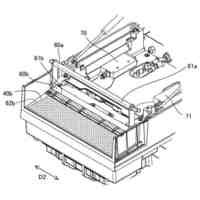
一実施形態による廃棄物処理システムの搬送部およびロボットを示した斜視図である。
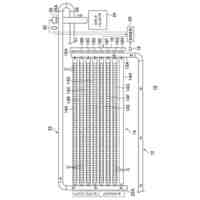
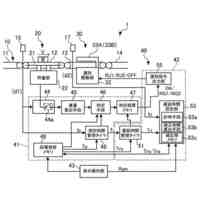
一実施形態による廃棄物処理システムの制御的な構成を示したブロック図である。
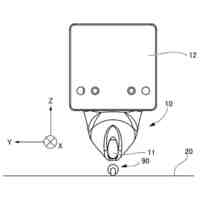
一実施形態による廃棄物処理システムのロボットの吸着ハンドを示した側面図である。
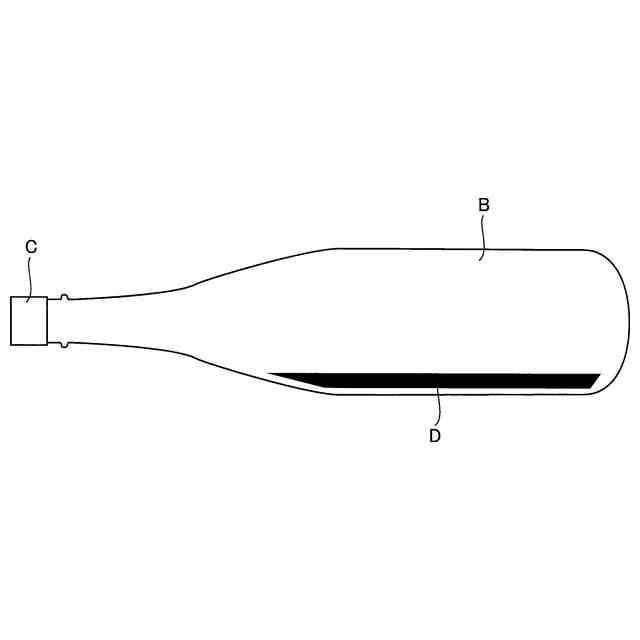
一実施形態による廃棄物処理システムにより仕分ける廃棄物の一例を示した図である。
一実施形態による廃棄物処理システムの第1撮像部により撮像した画像の第1処理例を示した図である。
一実施形態による廃棄物処理システムの第1撮像部により撮像した画像の第2処理例を示した図である。
一実施形態による廃棄物処理システムの第2撮像部により撮像した画像の処理例を示した図である。
一実施形態による廃棄物処理システムのキャップの判別を説明するための図である。
一実施形態による廃棄物処理システムのビンの判別を説明するための図である。
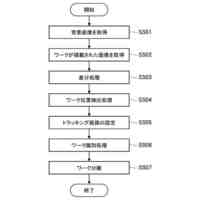
一実施形態による廃棄物処理システムの廃棄物取り出し処理を説明するためのフロー図である。
一実施形態による廃棄物処理システムの廃棄物選別処理を説明するためのフロー図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
廃棄物処理システム
2日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
9日前
川崎重工業株式会社
ポペット弁装置、及びそれを備える液圧駆動システム
5日前
川崎重工業株式会社
摩擦攪拌ツールの制御方法及び摩擦攪拌装置
5日前
川崎重工業株式会社
状態監視装置、状態監視方法及び状態監視プログラム
5日前
個人
穀物選別機
5か月前
日東精工株式会社
検査装置
4か月前
日清製粉株式会社
篩
3か月前
個人
ゴミ分別システム
1か月前
株式会社タケエイ
振動篩装置
3か月前
株式会社レクザム
基板アンローダ
3か月前
株式会社クボタ
豆類選別機
5日前
株式会社クボタ
豆類選別機
5日前
株式会社クボタ
豆類選別機
5日前
シブヤ精機株式会社
農産物選別装置
5か月前
川崎重工業株式会社
廃棄物処理システム
2日前
シブヤ精機株式会社
農産物選別システム
5か月前
シブヤ精機株式会社
農産物の集出荷装置
9日前
川崎重工業株式会社
廃棄物処理システム
4か月前
川崎重工業株式会社
廃棄物処理システム
5か月前
川崎重工業株式会社
廃棄物処理システム
5か月前
コネクテッドロボティクス株式会社
処理方法
2か月前
セキ工業株式会社
部品分別装置
5か月前
キヤノン株式会社
分別装置及び分別方法
2か月前
アンリツ株式会社
物品検査装置
4か月前
アンリツ株式会社
物品検査装置
4か月前
キヤノン株式会社
分別装置及び分別方法
4か月前
新東工業株式会社
分級装置及び粉塵固化システム
6か月前
東芝ライテック株式会社
搬送システム
4か月前
株式会社栗本鐵工所
ローラスクリーン
5日前
株式会社栗本鐵工所
ローラスクリーン
5か月前
株式会社クボタ
豆類選別機
5日前
株式会社クボタ
豆類選別機
5日前
株式会社シンセイ
砂乾燥選別装置
3か月前
株式会社クボタ
豆類選別機
5日前
株式会社サタケ
測定装置および選別装置
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ