TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025158627
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061355
出願日
2024-04-05
発明の名称
走行制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/06 20060101AFI20251009BHJP(車両一般)
要約
【課題】目標位置に対する横ずれと車両の向きとを収束できる技術を提供する。
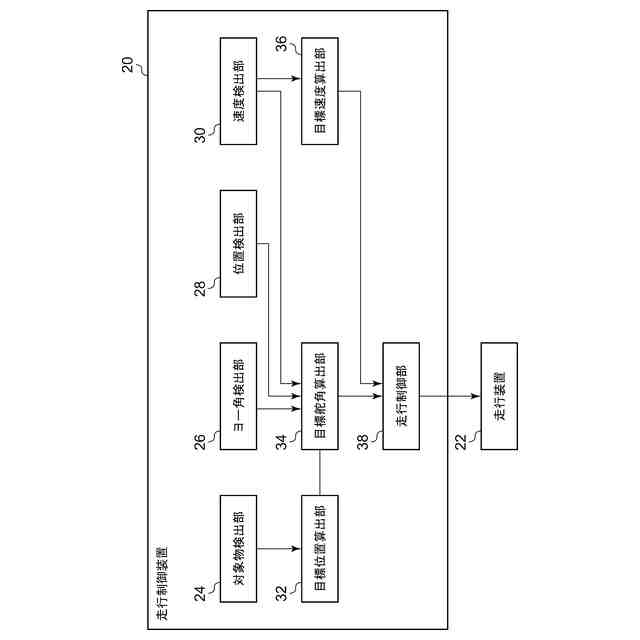
【解決手段】駐停車時または幅寄せ時に車両を自動運転制御によって目標位置に移動させる走行制御装置は、車両の前輪軸または後輪軸の中心位置情報を検出する位置検出部と、車両のヨー角を検出するヨー角検出部と、前輪または後輪の車輪速をもとに車両の速度を検出する速度検出部と、前輪および後輪の目標舵角を算出する目標舵角算出部と、算出した目標舵角に応じて前輪および後輪を転舵する走行制御部と、を備える。目標舵角算出部は、式(1)によって前輪の目標舵角を算出し、式(2)によって後輪の目標舵角を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
駐停車時または幅寄せ時に車両を自動運転制御によって目標位置に移動させる走行制御装置であって、
前記車両の前輪軸または後輪軸の中心位置情報を検出する位置検出部と、
前記車両のヨー角を検出するヨー角検出部と、
前輪または後輪の車輪速をもとに前記車両の速度を検出する速度検出部と、
前記前輪および前記後輪の目標舵角を算出する目標舵角算出部と、
算出した目標舵角に応じて前記前輪および前記後輪を転舵する走行制御部と、を備え、
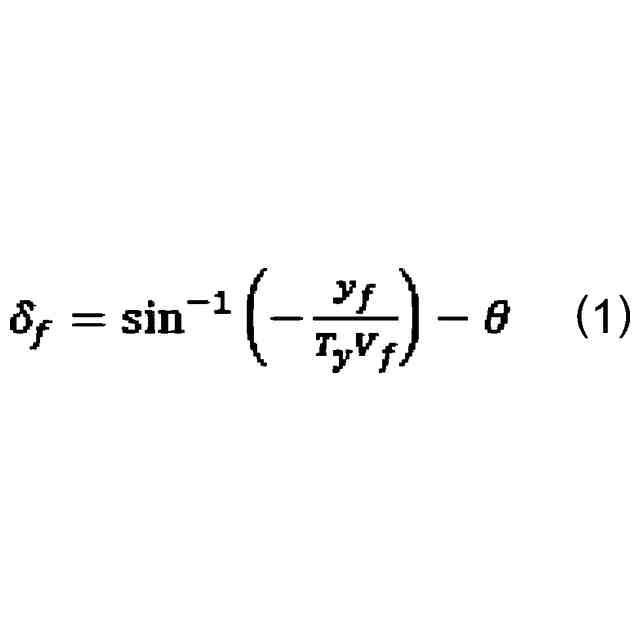
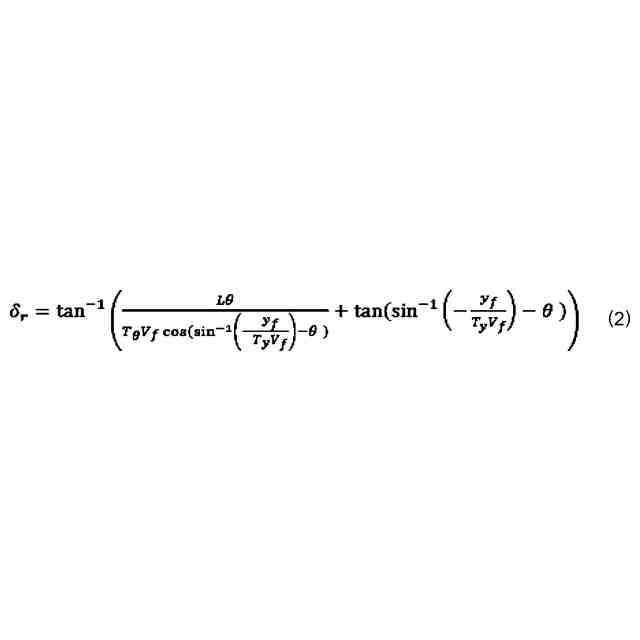
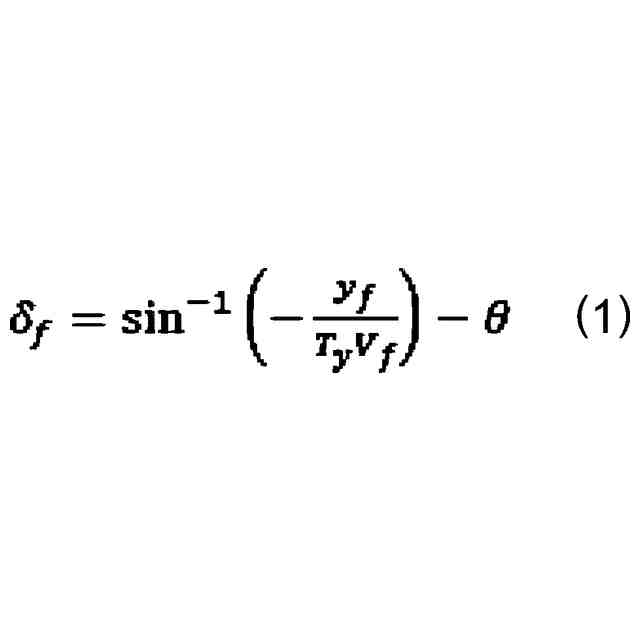
前記目標舵角算出部は、下記式(1)によって前記前輪の目標舵角を算出し、下記式(2)によって前記後輪の目標舵角を算出し、
前記目標舵角算出部は、目標位置を軸にしてヨー方向に回転して目標位置での前記車両の向きを変更可能であり、
前記目標舵角算出部は、前記後輪軸の回転速度をもとに検出された前記車両の速度を用いて目標舵角を算出可能であり、
前記走行制御部は、前記車両の速度を所定車速以下になるよう制御し、
前記目標舵角算出部は、下記式(1)および下記式(2)に含まれる第1時定数T
y
および第2時定数T
θ
の少なくともいずれか一方を前記車両の速度に応じて設定し、
前記目標舵角算出部は、下記式(1)および下記式(2)に示す(y
f
/T
y
V)を-1<(y
f
/T
y
V)<1の範囲に収まるように制限し、
前記目標舵角算出部は、下記式(1)および下記式(2)に示す前記前輪軸または前記後輪軸の中心位置情報を補正して目標位置を変更可能であり、
前記目標舵角算出部は、下記式(1)および下記式(2)に示すヨー角を補正して目標位置での前記車両の向きを変更可能であり、
前記目標舵角算出部は、V
f
cos(δ
f
)=V
r
cos(δ
r
)の式をもとに、下記式(1)および下記式(2)に含まれる前記前輪を基準とした前記車両の速度を前記後輪の車輪速をもとにした前記車両の速度から算出可能であり、
前記目標舵角算出部は、前記車両の前進または後退するときに目標舵角を算出することを特徴とする走行制御装置。
TIFF
2025158627000004.tif
31
164
TIFF
2025158627000005.tif
32
164
δ
f
は前輪の目標舵角であり、δ
r
は後輪の目標舵角であり、y
f
は目標位置に対する前輪軸の中心位置であり、V
f
は前輪の車輪速をもとにした車両の速度であり、T
y
は第1時定数であり、T
θ
は第2時定数であり、θは車両のヨー角である。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を自律的に走行させる自動運転制御を実行する技術に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、車両の周囲環境を検出して駐車位置と駐車経路を演算し、駐車経路に沿って車両を駐車位置へ自動的に移動する自動駐車装置が開示されている。この自動駐車装置は、現在地の駐車経路からの外れ量を検出し、外れ量に応じて前輪操舵を固定して後輪操舵によって修正操舵を行なう。
【先行技術文献】
【特許文献】
【0003】
特開平10-264839号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術において、修正操舵が実行されると車両の向きが変わるため、駐車位置での車両の向きが駐車経路の走行方向に対して傾くおそれがある。
【0005】
本発明の目的は、目標位置に対する横ずれと車両の向きとを収束できる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様は、駐停車時または幅寄せ時に車両を自動運転制御によって目標位置に移動させる走行制御装置であって、車両の前輪軸または後輪軸の中心位置情報を検出する位置検出部と、車両のヨー角を検出するヨー角検出部と、前輪または後輪の車輪速をもとに車両の速度を検出する速度検出部と、前輪および後輪の目標舵角を算出する目標舵角算出部と、算出した目標舵角に応じて前輪および後輪を転舵する走行制御部と、を備える。目標舵角算出部は、式(1)によって前輪の目標舵角を算出し、式(2)によって後輪の目標舵角を算出する。
【発明の効果】
【0007】
本発明によれば、目標位置に対する横ずれと車両の向きとを収束できる技術を提供できる。
【図面の簡単な説明】
【0008】
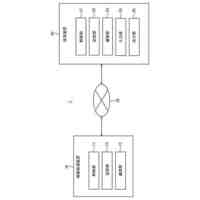
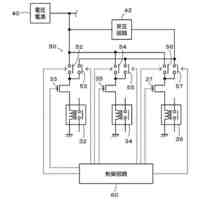
実施例の走行制御システムの機能構成を示す図である。
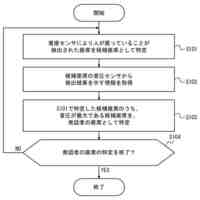
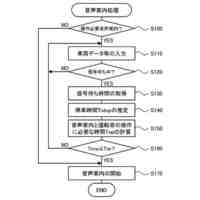
自動運転制御中での待機処理について説明するための図である。
【発明を実施するための形態】
【0009】
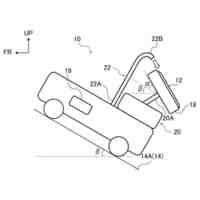
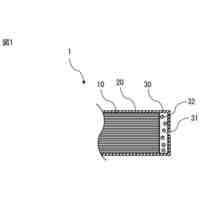
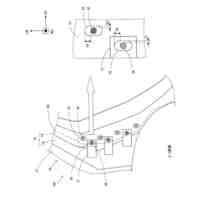
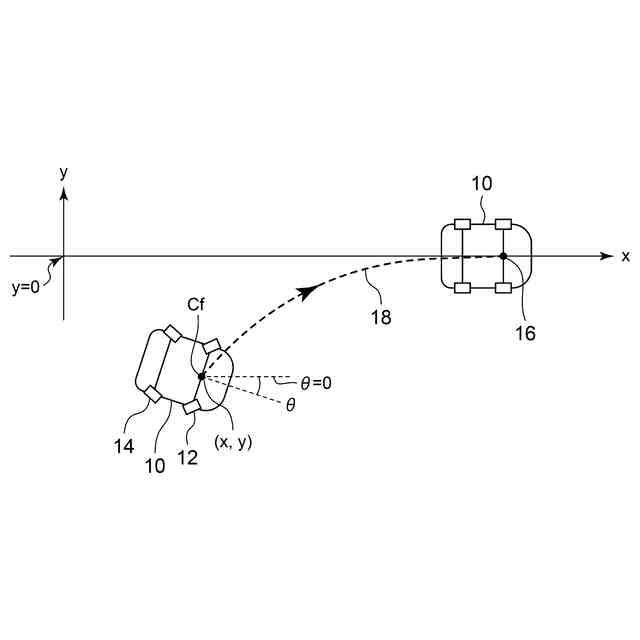
図1は、実施例の走行制御装置の動作を説明するための図である。図1では、車両10が走行経路18を通って目標位置16に向かって移動している様子を示す。車両10に搭載された走行制御装置は、駐車時や幅寄せ時に低速走行で車両10を自律的に走行する自動運転制御を実行する。目標位置16は、例えば駐車位置や停車位置であり、駐車位置へ到達する途中の中間地点であってよい。中間地点は、駐車時に車両10が前進または後退に切り返す地点であってよい。
【0010】
車両10の前輪12および後輪14は、それぞれ転舵可能である。一対の前輪12を連結する前輪軸の中心位置C
f
は、グローバル座標系で座標(x
f
,y
f
)で表される。目標位置16の座標は(0,0)で表されるため、中心位置C
f
の座標(x
f
,y
f
)は、目標位置16に対する車両10の位置を示す。y
f
は、目標位置16に対する横ずれ量である。車両のヨー角θは、目標位置16で目標とする車両10の向きを基準に表される。目標位置16で目標とする車両10の向きを目標ヨー角とし、目標ヨー角はゼロである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
椅子
10日前
トヨタ自動車株式会社
電池
17日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車体
3日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
固定子
15日前
トヨタ自動車株式会社
電動機
今日
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
電磁弁
10日前
トヨタ自動車株式会社
正極層
今日
トヨタ自動車株式会社
自動車
1日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
加熱器
14日前
トヨタ自動車株式会社
ケース
16日前
トヨタ自動車株式会社
飛行体
7日前
トヨタ自動車株式会社
乾燥装置
7日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
通話装置
14日前
トヨタ自動車株式会社
電源装置
7日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
塗工装置
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ