TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025158833
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061733
出願日
2024-04-05
発明の名称
検出装置、プログラム、及び算出方法
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01L
5/169 20200101AFI20251009BHJP(測定;試験)
要約
【課題】回転体に作用する荷重の算出精度を向上できる検出装置、プログラム、及び算出方法を提供する。
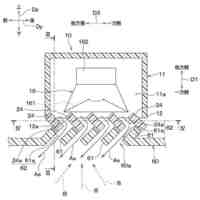
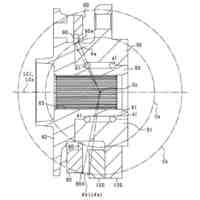
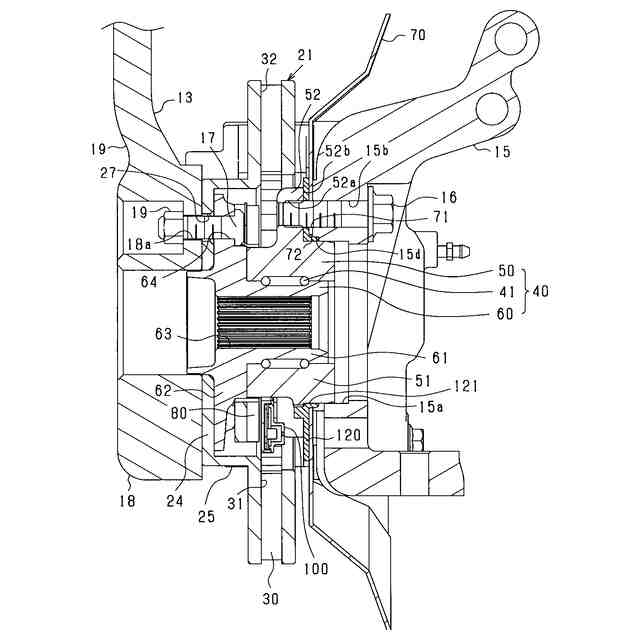
【解決手段】検出装置は、車輪ユニットに適用される。車輪ユニットは、外輪部材50、内輪部材60及び転動体41を備えるハブベアリング40を備えている。検出装置は、内輪部材60に設けられ、内輪部材60の回転中心を中心にして内輪部材60の周方向に延びる円環状のターゲット部材80と、自身に対するターゲット部材80の相対変位に応じた電圧信号を検出するセンサ基板100と、算出部とを備える。算出部は、検出された電圧信号に基づいて、車輪に対する特定方向における相対変位を算出する。算出部は、算出した特定方向における相対変位と、車輪に対して作用する荷重に関係する算出パラメータとに基づいて、車輪に作用する荷重を算出する。
【選択図】 図3
特許請求の範囲
【請求項1】
回転体(11,14)を備える機械装置(10)に適用される検出装置において、
前記機械装置は、前記回転体をベース部(15)に対して回転可能に支持する軸受部材(40)を備え、
前記軸受部材は、
前記軸受部材の回転中心軸線が延びる方向である軸線方向に延びるとともに、前記ベース部に対して固定される第1軸受部(50)と、
前記軸線方向と直交する径方向において前記第1軸受部と対向する位置に設けられ、前記回転体が固定される第2軸受部(60)と、
前記第1軸受部及び前記第2軸受部の間に設けられた転動体(41)と、
を有し、前記ベース部に対して前記第2軸受部を回転可能に支持し、
前記第1軸受部及び前記第2軸受部のうちいずれか一方に設けられ、前記軸受部材の回転中心を中心にして周方向に延びる円環状の検出対象部(80)と、
前記軸線方向において前記検出対象部と対向する位置に設けられた信号検出部(100)と、
算出部(117)と、
を備え、
前記信号検出部は、自身に対する前記検出対象部の相対変位に応じた電圧信号を検出し、
前記算出部は、
検出された前記電圧信号に基づいて、前記回転体に対する特定方向における前記相対変位を算出し、
算出した前記特定方向における前記相対変位と、前記回転体に対して作用する荷重に関係する算出パラメータとに基づいて、前記回転体に対して前記特定方向に作用する荷重を算出する、検出装置。
続きを表示(約 2,100 文字)
【請求項2】
前記算出部は、
検出された前記電圧信号に基づいて、前記特定方向と直交する方向である交差方向における前記相対変位を算出し、
前記算出パラメータとして、算出した前記交差方向における前記相対変位を用いる、請求項1に記載の検出装置。
【請求項3】
前記機械装置は、前記回転体として、車両の左右の車輪を備え、
左右の前記車輪のそれぞれに対して、前記検出対象部及び前記信号検出部が設けられており、
前記算出部は、
左右の前記車輪のうち、一方の車輪である第1の車輪に設けられた前記信号検出部により検出された前記電圧信号に基づいて、前記第1の車輪における前記特定方向の前記相対変位を算出し、
左右の前記車輪のうち、他方の車輪である第2の車輪に設けられた前記信号検出部により検出された前記電圧信号に基づいて、前記第2の車輪における前記相対変位を算出し、
前記第1の車輪に対して前記特定方向に作用する荷重を算出するために、前記算出パラメータとして、さらに、前記第2の車輪における算出した前記相対変位を用いる、請求項2に記載の検出装置。
【請求項4】
前記算出部は、
前記第2の車輪に設けられた前記信号検出部により検出された前記電圧信号に基づいて、前記第2の車輪における前記軸線方向の前記相対変位を算出し、
前記算出パラメータとして、前記第2の車輪における算出した前記軸線方向の前記相対変位を用いる、請求項3に記載の検出装置。
【請求項5】
前記機械装置は、前記回転体として、車両の車輪を備え、
前記算出部は、前記算出パラメータとして、さらに、前記車両の加速度を検出する加速度センサの検出値を用いる、請求項2に記載の検出装置。
【請求項6】
回転体(11,14)と検出装置とを備える機械装置(10)に適用されるプログラムにおいて、
前記機械装置は、前記回転体をベース部(15)に対して回転可能に支持する軸受部材(40)を備え、
前記軸受部材は、
前記軸受部材の回転中心軸線が延びる軸線方向に延びるとともに、前記ベース部に対して固定される第1軸受部(50)と、
前記軸線方向と直交する径方向において前記第1軸受部と対向する位置に設けられ、前記回転体が固定される第2軸受部(60)と、
前記第1軸受部及び前記第2軸受部の間に設けられた転動体(41)と、
を有し、前記ベース部に対して前記第2軸受部を回転可能に支持し、
前記検出装置は、
前記第1軸受部及び前記第2軸受部のうちいずれか一方に設けられ、前記軸受部材の回転中心を中心にして周方向に延びる円環状の検出対象部(80)と、
前記軸線方向において前記検出対象部と対向する位置に設けられた信号検出部(100)と、
を備え、
前記信号検出部は、自身に対する前記検出対象部の相対変位に応じた電圧信号を検出し、
コンピュータ(117)に、
検出された前記電圧信号に基づいて、前記回転体に対する特定方向における前記相対変位を算出する処理と、
算出した前記特定方向における前記相対変位と、前記回転体に対して作用する荷重に関係する算出パラメータとに基づいて、前記回転体に対して前記特定方向に作用する荷重を算出する処理と、
を含む処理を実行させる、プログラム。
【請求項7】
回転体(11,14)と検出装置とを備える機械装置(10)に適用される算出方法において、
前記機械装置は、前記回転体をベース部(15)に対して回転可能に支持する軸受部材(40)を備え、
前記軸受部材は、
前記軸受部材の回転中心軸線が延びる軸線方向に延びるとともに、前記ベース部に対して固定される第1軸受部(50)と、
前記軸線方向と直交する径方向において前記第1軸受部と対向する位置に設けられ、前記回転体が固定される第2軸受部(60)と、
前記第1軸受部及び前記第2軸受部の間に設けられた転動体(41)と、
を有し、前記ベース部に対して前記第2軸受部を回転可能に支持し、
前記検出装置は、
前記第1軸受部及び前記第2軸受部のうちいずれか一方に設けられ、前記軸受部材の回転中心を中心にして周方向に延びる円環状の検出対象部(80)と、
前記軸線方向において前記検出対象部と対向する位置に設けられた信号検出部(100)と、
を備え、
前記信号検出部は、自身に対する前記検出対象部の相対変位に応じた電圧信号を検出し、
検出された前記電圧信号に基づいて、前記回転体に対する特定方向における前記相対変位を算出するステップと、
算出した前記特定方向における前記相対変位と、前記回転体に対して作用する荷重に関係する算出パラメータとに基づいて、前記回転体に対して前記特定方向に作用する荷重を算出するステップと、
を含む、算出方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、検出装置、プログラム、及び算出方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、ハブベアリングの外輪部材に対する内輪部材の相対変位を利用して変位を検出するセンサ付きハブベアリングが知られている。なお、センサ付きハブベアリングは、例えば特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-275508号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転体を備える機械装置に適用される検出装置が知られている。機械装置は、軸受部材を備えている。軸受部材は、第1軸受部(例えば外輪部材)と、第2軸受部(例えば内輪部材)と、転動体とを備えている。第1軸受部は、ベース部に対して固定されている。第2軸受部には、回転体が固定されている。第1軸受部と第2軸受部との間には、転動体が設けられている。これにより、軸受部材は、回転体をベース部に対して回転可能に支持する。
【0005】
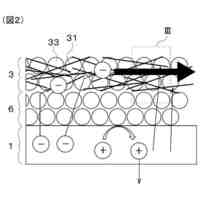
検出装置は、変位又は力を検出するための構成として、検出対象部と、センサ基板とを備えている。検出対象部は、円環状をしており、第1軸受部の回転中心を中心にして軸受部材の周方向に延びている。センサ基板は、検出対象部と軸受部材の軸方向に対向する位置に設けられている。センサ基板は、センサ基板に対する検出対象部の相対変位に応じた電圧信号を出力する。出力された電圧信号に基づいて、変位が算出される。算出された変位に基づいて、回転体に作用する荷重が算出される。
【0006】
回転体に作用する荷重の算出精度を向上する技術が望まれている。
【0007】
本開示の主たる目的は、回転体に作用する荷重の算出精度を向上できる検出装置、プログラム、及び算出方法を提供することである。
【課題を解決するための手段】
【0008】
本開示は、
回転体を備える機械装置に適用される検出装置において、
前記機械装置は、前記回転体をベース部に対して回転可能に支持する軸受部材を備え、
前記軸受部材は、
前記軸受部材の回転中心軸線が延びる方向である軸線方向に延びるとともに、前記ベース部に対して固定される第1軸受部と、
前記軸線方向と直交する径方向において前記第1軸受部と対向する位置に設けられ、前記回転体が固定される第2軸受部と、
前記第1軸受部及び前記第2軸受部の間に設けられた転動体と、
を有し、前記ベース部に対して前記第2軸受部を回転可能に支持し、
前記第1軸受部及び前記第2軸受部のうちいずれか一方に設けられ、前記軸受部材の回転中心を中心にして周方向に延びる円環状の検出対象部と、
前記軸線方向において前記検出対象部と対向する位置に設けられた信号検出部と、
算出部と、
を備え、
前記信号検出部は、自身に対する前記検出対象部の相対変位に応じた電圧信号を検出し、
前記算出部は、
検出された前記電圧信号に基づいて、前記回転体に対する特定方向における前記相対変位を算出し、
算出した前記特定方向における前記相対変位と、前記回転体に対して作用する荷重に関係する算出パラメータとに基づいて、前記回転体に対して前記特定方向に作用する荷重を算出する。
【0009】
本開示では、回転体に対する特定方向の相対変位と、回転体に作用する荷重に関係する算出パラメータとに基づいて、回転体に対して特定方向に作用する荷重が算出される。これにより、回転体に荷重が作用することに伴い軸受部材の状態が変化することを考慮して、回転体に対して特定方向に作用する荷重を算出することができる。その結果、回転体に作用する荷重の算出精度を向上することができる。
【図面の簡単な説明】
【0010】
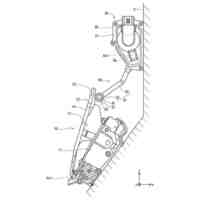
車輪ユニットの斜視図。
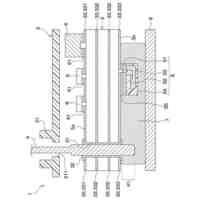
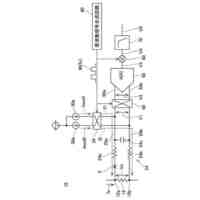
車輪ユニットの縦断面図。
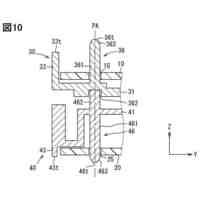
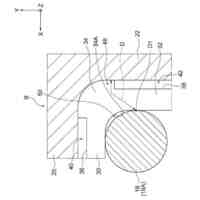
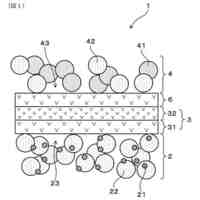
車輪ユニットのハブベアリング近傍の部分拡大図。
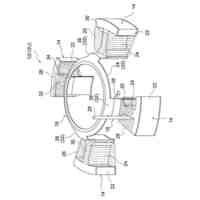
車輪ユニットの分解斜視図。
車輪ユニットの分解斜視図。
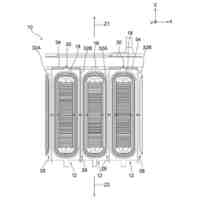
ターゲット部材の平面図。
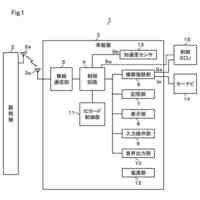
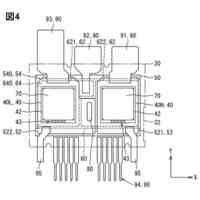
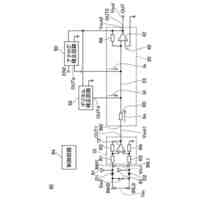
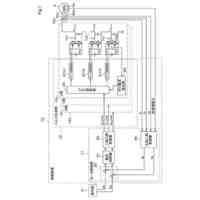
センサ基板及び処理部の電気的構成を示す図。
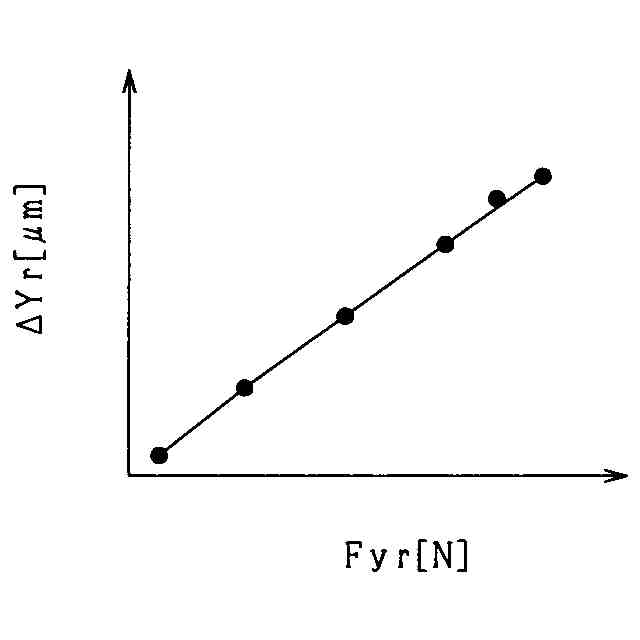
車両の静止状態における横力と軸方向変位との関係を示す図。
車両の静止状態における垂直荷重と上下方向変位との関係を示す図。
種々の走行モードにおける横力と軸方向変位との関係を示す図。
種々の走行モードにおける垂直荷重と上下方向変位との関係を示す図。
変位に対して荷重のばらつきが生じる要因を説明するための図。
ハブベアリングの変形方向を説明するための図。
ハブベアリングの状態の変化を説明するための図。
重回帰分析で設定する目的変数及び説明変数を示す図。
重回帰分析の結果の一例を示す図。
処理部により実行される処理の手順を示すフローチャート。
左前輪に作用する横力の算出結果の一例を示す図。
左前輪に作用する垂直荷重の算出結果の一例を示す図。
その他の実施形態に係る算出パラメータの一例を示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
4日前
株式会社デンソー
車載器
17日前
株式会社デンソー
回転機
4日前
株式会社デンソー
接合体
1か月前
株式会社デンソーエレクトロニクス
発音装置
1か月前
株式会社デンソーエレクトロニクス
発音装置
21日前
株式会社デンソー
反力装置
11日前
株式会社デンソー
電子装置
11日前
株式会社デンソー
電子装置
12日前
株式会社デンソー
太陽電池
1か月前
株式会社デンソー
ステータ
17日前
株式会社デンソー
ステータ
17日前
株式会社デンソー
電子装置
21日前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
ねじ部材
17日前
株式会社デンソー
検出装置
3日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
農業用装置
13日前
株式会社デンソー
レーダ装置
21日前
株式会社デンソー
半導体装置
17日前
株式会社デンソーテン
インバータ
11日前
株式会社デンソー
電流センサ
4日前
株式会社デンソー
車載システム
11日前
株式会社デンソー
車載システム
11日前
株式会社デンソー
電気化学セル
21日前
株式会社デンソー
通信システム
21日前
株式会社デンソー
車両制御装置
11日前
株式会社デンソー
電圧変換回路
1か月前
株式会社デンソー
衝突予測装置
12日前
株式会社デンソー
電子制御装置
21日前
株式会社デンソー
運転支援装置
12日前
株式会社デンソー
衝突予測装置
12日前
株式会社デンソー
光位相変調器
1か月前
株式会社デンソー
電力変換装置
13日前
株式会社デンソー
電圧検出回路
13日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ