TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159143
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2025135788,2022012132
出願日
2025-08-18,2022-01-28
発明の名称
連続体ロボット制御システム及び連続体ロボット制御方法
出願人
キヤノン株式会社
代理人
個人
主分類
A61B
1/00 20060101AFI20251009BHJP(医学または獣医学;衛生学)
要約
【課題】連続体ロボットの湾曲部が被検者等の被検体の内部に差し入れられた後にツールチャネルに異なる複数のツールを挿抜する手技を行う際に、その手技に要する手間を減らせる仕組みを提供する。
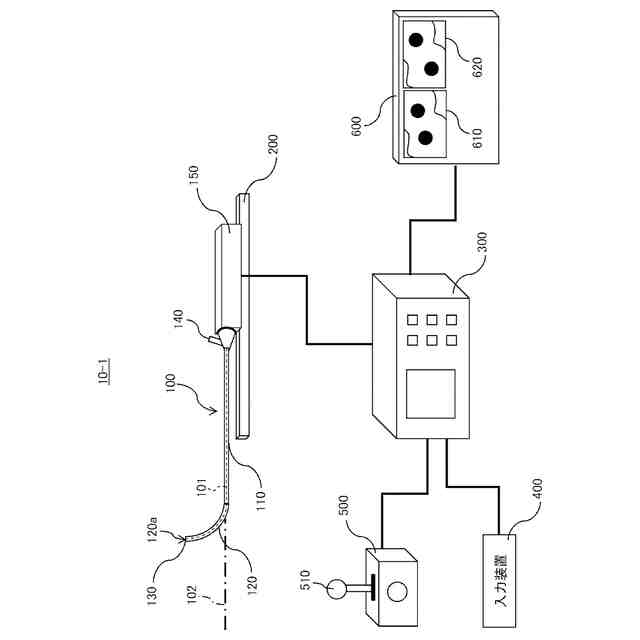
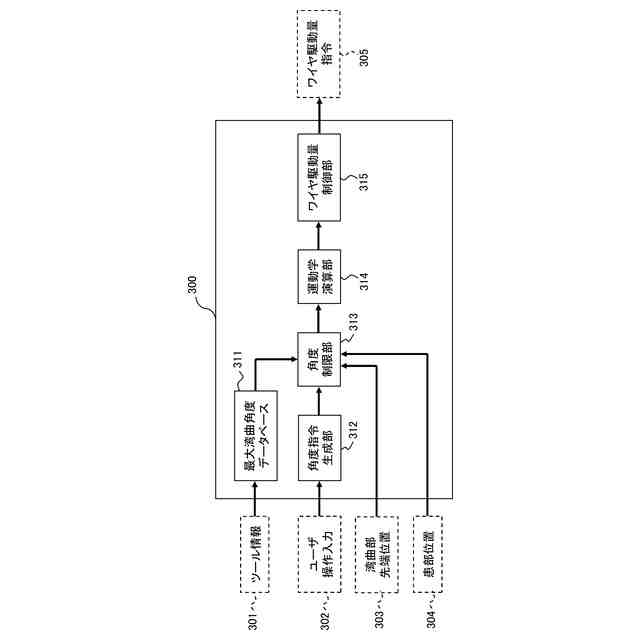
【解決手段】制御装置300は、ツールチャネル101に挿抜される複数の互いに異なるツールごとにツールチャネル101を通過可能な湾曲角度の最大値を取得し、当該取得した複数の湾曲角度の最大値のうち最小のものを最大湾曲角度として設定し、設定した最大湾曲角度の範囲内で湾曲部120が湾曲するように駆動ユニット150を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
線状部材が駆動されることによって基準軸に対して湾曲する湾曲部と、前記線状部材を駆動する駆動部と、前記湾曲部の内部を貫通する管状の経路であってツールを挿抜するためのツールチャネルと、を備える連続体ロボットと、
前記連続体ロボットの動作を制御する制御装置と、
を有する連続体ロボット制御システムであって、
前記制御装置は、前記ツールチャネルに挿抜される複数の互いに異なるツールごとに前記ツールチャネルを通過可能な湾曲角度の最大値を取得し、当該取得した複数の湾曲角度の最大値のうち最小のものを最大湾曲角度として設定し、前記最大湾曲角度の範囲内で前記湾曲部が湾曲するように前記駆動部を制御することを特徴とする連続体ロボット制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、前記湾曲部の先端位置と被検体の関心領域の位置との距離が閾値以下である場合に、前記最大湾曲角度の範囲内で前記湾曲部が湾曲するように前記駆動部を制御することを特徴とする請求項1に記載の連続体ロボット制御システム。
【請求項3】
前記制御装置は、ユーザの操作入力に基づく前記湾曲部の湾曲角度指令値が前記最大湾曲角度よりも小さい場合には前記湾曲角度指令値を前記湾曲部の目標湾曲角度として前記駆動部を制御し、前記湾曲角度指令値が前記最大湾曲角度以上の場合には前記最大湾曲角度を前記湾曲部の目標湾曲角度として前記駆動部を制御することを特徴とする請求項1または2に記載の連続体ロボット制御システム。
【請求項4】
前記連続体ロボットを被検体に対して前進移動および後進移動させる移動装置を更に有し、
前記制御装置は、前記被検体の関心領域の位置と当該関心領域の位置に到達するまでの前記湾曲部の目標経路と前記最大湾曲角度とに基づいて、前記移動装置による前記連続体ロボットの最大移動量を算出し、前記最大移動量の範囲内で前記連続体ロボットが移動するように前記移動装置を制御することを特徴とする請求項1乃至3のいずれか1項に記載の連続体ロボット制御システム。
【請求項5】
前記連続体ロボットは、複数の前記湾曲部を備えており、
前記複数の湾曲部は、前記連続体ロボットが被検体に対して前進移動する際に先頭となる第1の湾曲部と、前記前進移動する際に前記第1の湾曲部に追従して前進する第2の湾曲部と、を含み、
前記制御装置は、前記第1の湾曲部が所定の位置に到達したときに前記最大湾曲角度の範囲内で前記第1の湾曲部が湾曲するように前記駆動部を制御した場合、前記第2の湾曲部が前記所定の位置に到達したときに前記最大湾曲角度の範囲内で前記第2の湾曲部が湾曲するように前記駆動部を制御することを特徴とする請求項1乃至4のいずれか1項に記載の連続体ロボット制御システム。
【請求項6】
線状部材が駆動されることによって基準軸に対して湾曲する湾曲部と、前記線状部材を駆動する駆動部と、前記湾曲部の内部を貫通する管状の経路であってツールを挿抜するためのツールチャネルと、を備える連続体ロボットと、
前記連続体ロボットの動作を制御する制御装置と、
を有する連続体ロボット制御システムによる連続体ロボット制御方法であって、
前記制御装置が、前記ツールチャネルに挿抜される複数の互いに異なるツールごとに前記ツールチャネルを通過可能な湾曲角度の最大値を取得し、当該取得した複数の湾曲角度の最大値のうち最小のものを最大湾曲角度として設定し、前記最大湾曲角度の範囲内で前記湾曲部が湾曲するように前記駆動部を制御することを特徴とする連続体ロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、湾曲部の内部を貫通する管状の経路であってツールを挿抜するためのツールチャネルを備える連続体ロボットの制御を行う連続体ロボット制御システム及び連続体ロボット制御方法に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、患者等の被検者の負担を低減し治療・検査後のQOLを向上させるための低侵襲医療が注目を集めている。低侵襲医療の代表例として、内視鏡を用いた手術・検査が挙げられる。例えば、腹腔鏡手術は、従来の開腹手術と比べて手術創を小さくすることが可能となるため、術後に必要な入院期間を短縮できるだけでなく、美容上も優れているというメリットがある。
【0003】
低侵襲医療に用いられる内視鏡として、軟性内視鏡が知られている。この軟性内視鏡は、被検者の内部に挿入する挿入部が湾曲可能な部材で構成されているため、食道や大腸、肺などの湾曲する器官であっても、組織を圧迫することなく被検者の内部に挿入し、被検者の負担を低減することができる。さらに、アクチュエータを用いて軟性内視鏡の挿入部を駆動し、被検者の内部の経路に沿うように挿入部の姿勢を自動的に制御すれば、被検者の負担をより低減することが期待できる。また、軟性内視鏡の中には、生検や治療用の術具を含むツールを挿通することができるツールチャネルを備えるものがある。このような内視鏡を使うことで、被検者の体内の深部にある患部を観察するだけでなく組織を採取したり、治療を行ったりすることが可能となる。これらのことから、軟性内視鏡として利用可能な連続体ロボットの機構とその制御方法の研究開発が盛んに行われている。
【0004】
この連続体ロボットの挿入部であってアクチュエータ等の駆動部によって湾曲可能な湾曲部は、細径であることが望ましい。それは、挿入部である湾曲部が細径であれば、管腔を圧迫することなく被検者の体内の深部まで到達できるためである。加えて、挿入部である湾曲部が細径になれば、肺のように末梢に行くほど管腔の径が小さくなる臓器ではその深部にまで到達できるようになるため、より広い部位を診断または治療することができるようになる。
【0005】
特許文献1には、挿入部を細径化することが可能な軟性内視鏡の一例が記載されている。従来の軟性内視鏡は、管腔を観察するための撮像装置が挿入部に組み込まれていが、特許文献1に記載の軟性内視鏡は、観察に必要なときにのみツールチャネルから撮像ツールを挿入して使用する。そして、特許文献1に記載の軟性内視鏡では、患部の治療や患部から組織を採取するときには、撮像ツールをツールチャネルから抜去して替わりに術具のツールを挿入し、その後、患部を再び観察するときには術具のツールを抜去して撮像ツールを再び挿入する。これにより、従来の軟性内視鏡で撮像装置を設置するために必要としていたスペースだけ挿入部を細径化することが可能となっている。
【先行技術文献】
【特許文献】
【0006】
特開2010-82435号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
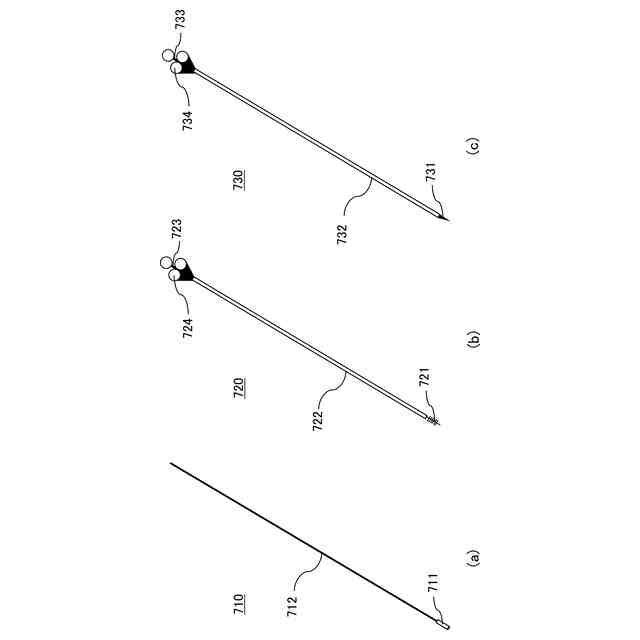
しかしながら、撮像ツールや術具のツールの中には、これらのツールの構成部品の一部に高剛性な部材を使用しているものがある。この場合、例えば特許文献1に記載の軟性内視鏡において挿入部である湾曲部を大きく湾曲させ過ぎてしまうと、ツールによっては高剛性な部材で形成されている部品がツールチャネルを通過することができなくなってしまう。そして、このような場合、ツールチャネルを通過できずに途中で詰まってしまったツールが通過可能なように湾曲部の湾曲角度を再調整する必要が生じて、手技に要する手間が増え、その結果、手技を行う医師や被検者の負担が増加してしまうことになる。
【0008】
本発明は、この問題点に鑑みてなされたものであり、連続体ロボットの湾曲部が被検者等の被検体の内部に差し入れられた後にツールチャネルに異なる複数のツールを挿抜する手技を行う際に、その手技に要する手間を減らせる仕組みを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の連続体ロボット制御システムは、線状部材が駆動されることによって基準軸に対して湾曲する湾曲部と、前記線状部材を駆動する駆動部と、前記湾曲部の内部を貫通する管状の経路であってツールを挿抜するためのツールチャネルと、を備える連続体ロボットと、前記連続体ロボットの動作を制御する制御装置と、を有する連続体ロボット制御システムであって、前記制御装置は、前記ツールチャネルに挿抜される複数の互いに異なるツールごとに前記ツールチャネルを通過可能な湾曲角度の最大値を取得し、当該取得した複数の湾曲角度の最大値のうち最小のものを最大湾曲角度として設定し、前記最大湾曲角度の範囲内で前記湾曲部が湾曲するように前記駆動部を制御する。
また、本発明は、上述した連続体ロボット制御システムによる連続体ロボット制御方法を含む。
【発明の効果】
【0010】
本発明によれば、連続体ロボットの湾曲部が被検体の内部に差し入れられた後にツールチャネルに異なる複数のツールを挿抜する手技を行う際に、その手技に要する手間を減らすことが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
トナー
11日前
キヤノン株式会社
トナー
16日前
キヤノン株式会社
トナー
11日前
キヤノン株式会社
トナー
11日前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
電子機器
20日前
キヤノン株式会社
定着装置
10日前
キヤノン株式会社
撮像装置
24日前
キヤノン株式会社
電子機器
18日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
現像容器
9日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
定着装置
1か月前
キヤノン株式会社
現像容器
9日前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
撮影装置
9日前
キヤノン株式会社
発光装置
23日前
キヤノン株式会社
表示装置
23日前
キヤノン株式会社
現像装置
2日前
キヤノン株式会社
記録装置
16日前
キヤノン株式会社
測距装置
4日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
定着装置
24日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
収容装置
24日前
キヤノン株式会社
モジュール
11日前
キヤノン株式会社
半導体装置
18日前
キヤノン株式会社
光学センサ
11日前
キヤノン株式会社
現像剤容器
17日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
表示システム
17日前
キヤノン株式会社
画像形成装置
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ