TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025162977
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2025043034
出願日
2025-03-18
発明の名称
経路データセット生成
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20251021BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】経路生成ニューラルネットワークをトレーニングするためのロボット動作プログラムのデータセットを生成するための方法を実現する。
【解決手段】大言語モデルは、ロボットタスクライブラリ及びアセットジオメトリデータベースを入力として使用する。大言語モデルは、タスクをステップに分解し、ロボット及びオブジェクトの動作を記述するコードを生成し、タスクを完了する。生成されたコードは、タスクのためのロボット動作を生成し、対応するロボット動作プログラムが作成され、シミュレーションで実行される。ロボット動作プログラムは、RRT及び/または最適化を介して無衝突ロボット経路を生成するために使用され、無衝突経路は、ロボット到達可能性及びオブジェクト配置成功のために検証される。検証された動作プログラムは、経路生成ニューラルネットワークをトレーニングするために使用されデータセットに追加される。
【選択図】図3
特許請求の範囲
【請求項1】
ロボット経路データセット生成のための方法であって、
タスクライブラリ、オブジェクトアセットライブラリ、及びタスクのためのテキスト命令を、プロセッサ及びメモリを有するコンピュータ上で実行される大言語モデル(LLM)に提供することと、
前記LLMにより、ロボットが前記タスクを実行するためのプログラミング命令を含むコードを生成することと、
前記コードを使用して前記タスクを実行する前記ロボットのシミュレーションを実行することと、
衝突回避経路生成アルゴリズムを使用した前記シミュレーションから無衝突ロボット経路を生成することと、
一連の経路品質基準に対して前記ロボット経路を検証することと、
前記ロボット経路が前記経路品質基準を満たす場合、前記経路データセットに障害物環境を定義する前記ロボット経路及びデータを追加することと、
を備える、方法。
続きを表示(約 980 文字)
【請求項2】
前記タスクライブラリは、前記タスクを実行するために組み合わせ可能なプリミティブタスク及びタスクサブ組み合わせの定義を含む、請求項1に記載の方法。
【請求項3】
前記オブジェクトアセットライブラリは、ワークピースとロボットアーム部品とグリッパと固定具と障害物を含む、前記タスクに関与するオブジェクトの3次元モデルを含む、請求項1に記載の方法。
【請求項4】
前記コードを生成することは、前記タスクを実行するために必要な、ロボットアームの端部におけるツール中心点の動作を定義するプログラミング命令を書き込むことを含む、請求項1に記載の方法。
【請求項5】
前記LLMは、まず、前記テキスト命令に基づいて前記タスクを実行するために必要なステップの物語を書き込み、次いで、前記ステップの物語に対応する前記プログラミング命令を書き込む、請求項4に記載の方法。
【請求項6】
前記シミュレーションを実行することは、前記ツール中心点の動作に対応する前記ロボットの全ての部分の動作を計算することを含む、請求項4に記載の方法。
【請求項7】
前記ロボットの全ての部分の動作を計算することは、逆運動学計算アルゴリズムを使用することを含む、請求項6に記載の方法。
【請求項8】
前記無衝突ロボット経路を生成することは、前記ロボットのシミュレーションを初期経路として使用することと、前記無衝突ロボット経路を生成するために高速探索ランダムツリー(RRT)アルゴリズムまたは最適化ベースのアルゴリズムのいずれかを使用することとを含む、請求項1に記載の方法。
【請求項9】
前記ロボット経路を検証することは、前記ロボット経路が衝突のないことと、前記ロボット経路内の前記ロボットの全ての動作が実行可能であることと、前記タスクが成功裏に完了したことを検証することと、を含む、請求項1に記載の方法。
【請求項10】
前記経路データセットは、複数の検証されたロボット経路が追加され、その各々は前記テキスト命令、開始点及び目標点、並びに前記障害物環境の異なる組合せに基づいて生成される、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般に、産業用ロボット動作プログラミングの分野に関し、より詳細には、経路生成ニューラルネットワークをトレーニングするために使用することができるロボット動作プログラムのデータセットを生成するための方法に関し、タスク環境を構成しロボットシミュレーションを作成するコードを生成するために大言語モデルを使用し、シミュレーションされたロボット動作プログラムを衝突回避のためにチェックし、検証されたロボット動作プログラムをデータセットに追加する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
関連技術の議論
広範囲の製造、組み立て、及び材料移動作業を行うための産業用ロボットの使用は周知である。ロボットに開始点から目標点へ移動するように教示するための様々な技術が存在する。しかしながら、開始点と目標点との間に障害物が存在する場合、既存の経路生成技術は全て、特定の欠点を示す。
【0003】
経路生成のための1つの既知の技術は、ティーチングペンダントを使用することである。ティーチングペンダントは、ロボットコントローラと通信し、人間のオペレータによって操作されて、「X方向のジョグ」または「ローカルZ軸を中心にグリッパを回転させる」といったようなインクリメンタルな動きをロボットに指示する。しかしながら、複雑な障害物環境においてロボットをプログラミングするためのティーチングペンダントの使用は、困難であり、誤りを起こしやすく、時間がかかることがしばしば分かっている。経路生成のための別の知られている技術は「リードスルー(lead-through)」プロセスにおいて協調ロボットを使用することであり、これは、人間のオペレータがロボットアームの端部を手動で把持し、ツールまたはワークピースを開始点から目標点まで移動させる。リードスルー処理は、経路を選択する際に人間の専門知識を獲得するという利点を有し、また、動作中のロボットの全ての部分の衝突回避評価を可能にする。残念ながら、オペレータが複雑な障害物環境における衝突を回避するためにロボット全体を操作することは不可能であり得る。
【0004】
また、人間のデモンストレーションによるロボット教示も知られており、人間のデモンストレータはワークピースを手動で把持し、視覚モーションキャプチャを用いて開始位置から目標位置まで移動させる。しかしながら、人間のデモンストレーションによる経路生成はワークの正確な移動に必要な位置精度を欠いている可能性があり、人間のデモンストレーションによる経路生成は、ロボットアーム自体と作業空間内の障害物との衝突回避を考慮していない。
【0005】
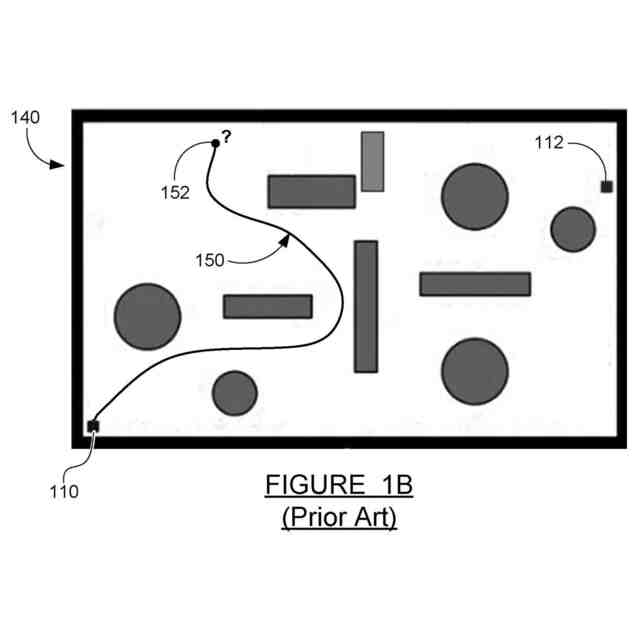
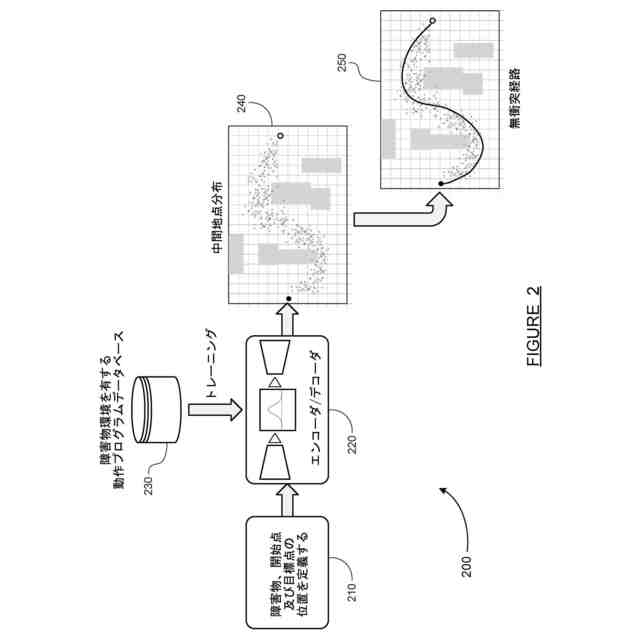
自動経路生成技術も知られており、開始点及び目標点が、環境内の障害物の幾何学的定義とともに提供され、経路生成計算が実行される。1つの経路生成技術は、エンコーダ/デコーダニューラルネットワークモデルを使用して、障害物環境及び経路開始点/終了点に基づいて中間地点(waypoint)を計算する。しかしながら、エンコーダ/デコーダニューラルネットワークをトレーニングするために必要な動作プログラムのデータベースは、作成するのが困難であり時間がかかる。
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の事情に鑑みて、エンコーダ/デコーダニューラルネットワークをトレーニングするために使用されるデータセットを追加(populate)するために、多数の無衝突経路(衝突の無い経路:collision-free paths)を自動的に生成することができる、改善されたロボット経路生成技術が必要とされている。
【課題を解決するための手段】
【0007】
本開示は、経路生成ニューラルネットワークをトレーニングするために使用することができるロボット動作プログラムのデータセットを自動的に生成するための方法を説明する。大言語モデルは、タスク環境を分解(break down)して構成しロボットシミュレーションを作成するコードを生成するために使用される。大言語モデルは、ロボットタスクライブラリ及びアセットジオメトリデータベースを入力として使用する。タスク及びアセット入力及びタスク命令に基づいて、大言語モデルは、タスクをステップに分解し、次いで、ロボット及びオブジェクトの動作を記述するコードを生成してタスクを完了する。生成されたコードは、タスクのためのロボット動作を生成し、対応するロボット動作プログラムが作成され、シミュレーションで実行される。シミュレーションされたロボット動作プログラムは、RRTまたは最適化ベースの計算を介して無衝突ロボット経路を生成するために使用され、ロボット到達可能性及びオブジェクト配置成功のために無衝突経路が検証される。検証されたロボット動作プログラムは、経路生成ニューラルネットワークの後続のトレーニングに使用されるデータセットに追加される。
【0008】
本開示のデバイス及び方法のさらなる特徴は、添付の図面と併せて、以下の説明及び添付の請求項から明らかになるのであろう。
【図面の簡単な説明】
【0009】
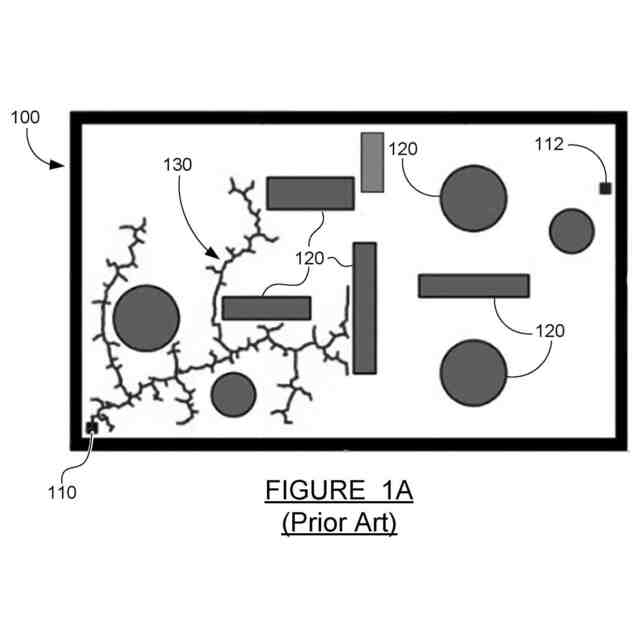
図1Aは、高速探索ランダムツリー(RRT:rapidly-exploring random tree)技術を使用した自動経路生成を例示する図である。
図1Bは、当技術分野で知られているように最適化ベースの技術を使用した自動経路生成を例示する図である。
図2は、先行の開示の実施形態による、ロボット経路生成のためのシステムを例示するブロック図である。
図3は、本開示の実施形態による、大言語モデルを使用してロボットタスクをシミュレーションするコードを生成する、自動経路データセット生成のための技術を示すフローチャートであり、ここで、検証された経路がトレーニングデータベースに追加される。
図4は、本開示の実施形態による、タスク命令とともにアセット及びタスクライブラリ入力、並びにタスク分解(task breakdown)及びコード生成出力を含む、図3の経路データセット生成パイプラインの大言語モデルの入力及び出力を例示する図である。
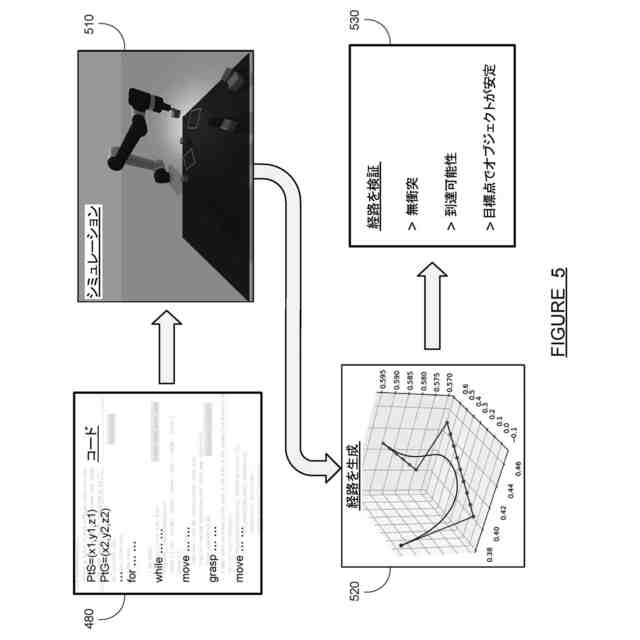
図5は、本開示の実施形態による、図3の経路データセット生成パイプラインのシミュレーション及び経路生成ステップと、生成された経路の検証とを示す図である。
図6は、本開示の実施形態による、自動経路データセット生成、生成されたデータセットを使用したエンコーダ/デコーダニューラルネットワークのトレーニング、並びにロボット経路生成及び実行のためのシステムを示すブロック図である。
【発明を実施するための形態】
【0010】
自動化されたロボット経路データセット生成のための方法を対象とする本開示の実施形態の以下の議論は、本質的に単なる例示であり、開示されたデバイス及び技術またはそれらの用途もしくは使用を限定することを決して意図しない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ファナック株式会社
経路データセット生成
3日前
ファナック株式会社
センサレスツール健全性監視
3日前
ファナック株式会社
表示装置
3日前
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
17日前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
1か月前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボット
29日前
株式会社三協システム
移載装置
1か月前
株式会社竹中工務店
補助セット
29日前
川崎重工業株式会社
ハンド
21日前
株式会社不二越
ロボット操作装置
1か月前
株式会社マキタ
ハンマドリル
4日前
太陽パーツ株式会社
アシストスーツ
1か月前
SMC株式会社
着脱装置
1か月前
株式会社マキタ
ハンマドリル
4日前
株式会社ミクロブ
把持装置
1か月前
トヨタ自動車株式会社
ロボット
24日前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
21日前
株式会社不二越
ロボットシステム
1か月前
本田技研工業株式会社
装置
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
21日前
株式会社不二越
エッジ仕上げ装置
1か月前
株式会社安川電機
ロボット
1日前
トヨタ自動車株式会社
軌道生成装置
24日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
歩行ロボット
1か月前
アネックスツール株式会社
ドライバービット
28日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
大和ハウス工業株式会社
ねじ回転工具
1か月前
ライオン株式会社
移載システム
1か月前
工機ホールディングス株式会社
作業機
21日前
トヨタ自動車株式会社
ロボットハンド
1日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ