TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163261
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2025134315,2022003570
出願日
2025-08-12,2017-05-15
発明の名称
ロボットマニピュレータシステムのためのシステムおよび方法
出願人
ヴェオリア ニュークリア ソリューションズ インコーポレイテッド
,
VEOLIA NUCLEAR SOLUTIONS INC.
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20251021BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
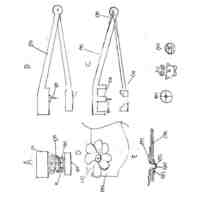
【課題】ロボットマニピュレータアームの展開および制御システムのための新規なシステムおよび方法を提供する。
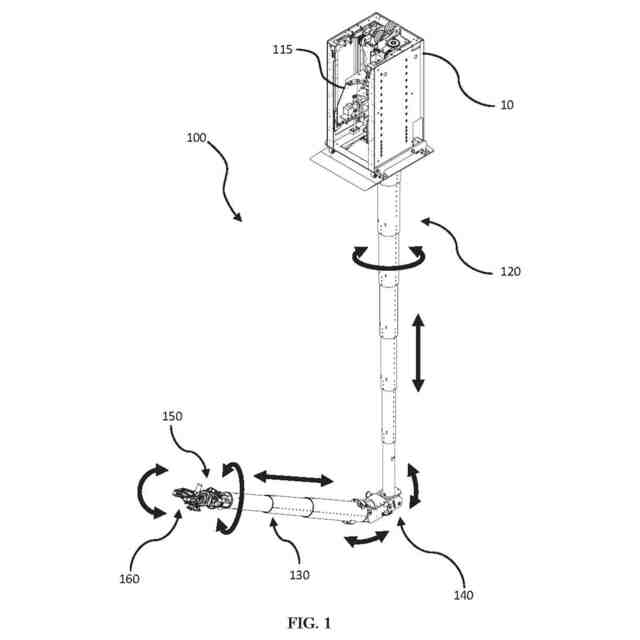
【解決手段】このシステムは、少なくとも垂直マストと、少なくとも2つのカムを備えるマスト展開システムと、肘と、アームがツールを展開するように動作可能なアームと、非接触センサを含む1つまたは複数のセンサと動的測定ユニットとを備える。カムにより、垂直マストおよびアームは、作業空間への展開中に垂直に維持される。非接触センサを、極座標で作業空間内の物体に対する範囲および方位を測定するために使用することができる。動的測定ユニットは、加速度計およびレートセンサを備え、直交座標系で動作する6自由度3軸センサとして構成される。システムは、センサから極座標および直交座標を受け取り、それらを直交座標系に変換するように動作可能なコントローラをさらに備える。
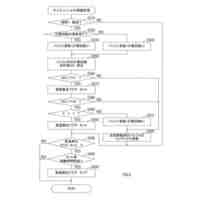
【選択図】 図1
特許請求の範囲
【請求項1】
ロボットアーム展開および制御システムであって、前記システムが、
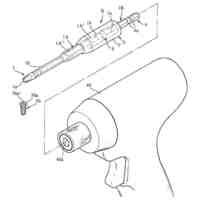
1つ以上の肘部によって連結された少なくとも2つのセグメントを備えるロボットアームであって、第1のセグメントが、伸縮式マストとして動作可能に構成され、第2のセグメントが、作業端部からツールを展開するように動作可能に構成される、ロボットアームと、
作業空間内への展開を制御するカム経路を備えるマスト展開システムと、
1つ以上のセンサと、
プロセッサベースのコントローラであって、
前記作業空間を画定する1つ以上の表面を前記1つ以上のセンサによって特定し、
前記作業空間を画定する前記1つ以上の表面に少なくとも部分的に基づいて前記作業空間の3次元マップを生成し、
前記作業空間内の前記1つ以上の表面からオフセットされた不透過性仮想障壁を確立し、前記不透過性仮想障壁のオフセットが、可変および均一の少なくとも一方であり、
前記不透過性仮想障壁からオフセットされた透過性仮想障壁を確立するように、構成されたコントローラと、
を備えるシステム。
続きを表示(約 870 文字)
【請求項2】
前記1つ以上のセンサが、動的測定ユニットおよび/または非接触センサの少なくとも一方を備え、前記非接触センサが、前記第2のセグメントの前記作業端部に取り付けられる、請求項1に記載のシステム。
【請求項3】
前記1つ以上のセンサが、ローカル直交座標系の各軸の方向に動作可能に向けられる、請求項2に記載のシステム。
【請求項4】
前記1つ以上のセンサが、少なくとも1つの動的測定ユニットおよび少なくとも1つの非接触センサを含み、前記動的測定ユニットが、前記非接触センサと併置される、請求項2に記載のシステム。
【請求項5】
前記1つ以上のセンサが、3つの加速度計および3つのレートセンサを備え、1つの加速度計および1つのレートセンサが、ローカル直交座標系の各軸の方向に向けられる、請求項1に記載のシステム。
【請求項6】
前記プロセッサベースのコントローラが、前記1つ以上のセンサから受信したデータを組み合わせるように更に動作可能に構成される、請求項1に記載のシステム。
【請求項7】
前記不透過性仮想障壁のオフセットが、作業を実施できる最小許容距離である、請求項1に記載のシステム。
【請求項8】
前記透過性仮想障壁が、前記ロボットアームが近づいたときに警告および/または触覚フィードバックの少なくとも一方を作業者に送信し、前記触覚フィードバックが、前記ロボットアームが前記不透過性仮想障壁に近づくにつれて大きくなる抵抗の形態である、請求項1に記載のシステム。
【請求項9】
前記不透過性仮想障壁が、前記ロボットアームが前記不透過性仮想障壁を越えて前進するのを防止する、請求項1に記載のシステム。
【請求項10】
前記プロセッサベースのコントローラが、作業者による前記ロボットアームの遠隔制御を可能にするように構成される、請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
[0001]著作権表示
本明細書には、著作権保護の対象となる事項が含まれている。著作権者は、米国特許商標庁の特許ファイルまたは記録に記載されているように、特許文書または特許開示のファクシミリ複製に異論を唱えないが、著作権のすべての権利を保有する。以下の表示は、以下に記載されているソフトウェア、スクリーンショット、およびデータ、ならびに以下の図面および無断転用禁止(All Rights Reserved)に適用される。
続きを表示(約 1,400 文字)
【0002】
[0002]関連出願
以下の出願は、2016年5月16日に出願された米国仮特許出願第62/337066号に対する優先権を主張し、その全体が参照により組み込まれる。
【0003】
[0003]本開示は、危険な空間および/またはアクセス困難な空間で作業を実行するように設計されたロボットシステムに関する。
【背景技術】
【0004】
[0004]ある種の産業プロジェクト環境は人体に有害であり、一般的に労働者が保護服と呼吸装置を着用して作業場に入り、作業する必要がある。また、特定のプロジェクトの空間や領域は人間の動きを念頭に置いて設計されていないことが多いため、スペースが小さすぎたり、暑すぎたり、寒すぎたり、人間が歩行することが一般的に困難または不可能な場合がある。一部の産業プロジェクト領域は非常に危険であり、アクセスすることが困難であるため、人間の進入や修復が実行不可能である。そのような領域にアクセスし、危険な状態に人間を晒すことを減らすために、遠隔ロボットマニピュレータが必要である。
【0005】
[0005]現行では、ほとんどの既製の遠隔マニピュレータは、特定のニーズに合わせて構築されており、機能と汎用性に限界がある。したがって、アクセスが困難な空間および/または危険な空間で作業を実行するための能力、汎用性、および信頼性が向上したオールインワンマニピュレータが必要とされている。
【0006】
[0006]詳細な明細書の複雑さおよび長さを低減するために、本出願の出願人は、以下の各段落で特定される以下の資料を参照により明示的に組み込む。組み込まれた資料は、必ずしも「先行技術」であるとは限らず、出願人は、組み込まれた資料の刊行日に遅れて宣誓する権利を明示的に留保する。
【0007】
[0007]2016年5月16日に出願された、米国特許出願第62/337066号明細書の「System and Method for a Robotic Manipulator Arm」は、その全体が参照により本明細書に組み込まれ、これに対し本出願は優先権を主張する。
【0008】
[0008]2016年5月2日に出願された米国特許出願第62/330330号明細書の「Tank Cleaning System」は、その全体が参照により本明細書に組み込まれる。
【0009】
[0009]2015年12月18日に出願され、2014年12月19日の優先日を有する、米国特許出願第14/975544号明細書の「Systems and Methods for Chain Joint Cable Routing」は、その全体が参照により本明細書に組み込まれる。
【0010】
[0010]2016年11月2日に出願され、2015年11月3日の優先日を有する、米国特許出願第15/341985号明細書の「System and Method for Inspection and Maintenance of Hazardous Spaces」は、その全体が参照により本明細書に組み込まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
21日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
25日前
株式会社マキタ
ハンマドリル
8日前
株式会社マキタ
ハンマドリル
8日前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
28日前
工機ホールディングス株式会社
作業機
25日前
株式会社安川電機
ロボット
5日前
本田技研工業株式会社
装置
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
川崎重工業株式会社
塗装システム
25日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
28日前
トヨタ自動車株式会社
ロボットハンド
5日前
アネックスツール株式会社
ドライバービット
1か月前
工機ホールディングス株式会社
作業機
25日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
川崎重工業株式会社
ワーク搬送ロボット
25日前
株式会社不二越
ロボットに用いる伝送路
18日前
株式会社マキタ
現場用作業機
14日前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
回転打撃工具
28日前
山九株式会社
レンチ保持治具
28日前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
NTN株式会社
ハンド
1か月前
セイコーエプソン株式会社
ロボット
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
NTN株式会社
把持装置
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
11日前
川崎重工業株式会社
ロボット
1か月前
学校法人立命館
ロボットハンド制御システム
14日前
NTN株式会社
作業装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ