TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025163786
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024067305
出願日
2024-04-18
発明の名称
チャック装置およびチャックシステム
出願人
SMC株式会社
代理人
弁理士法人桐朋
主分類
B25J
15/08 20060101AFI20251023BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】チャック装置の高さ方向の寸法を抑えつつ第1可動部および第2可動部の最大開き幅を広くすることができるチャック装置およびチャックシステムを提供する。
【解決手段】チャック装置は、ワークWを把持するための第1可動部14および第2可動部16と、第1可動部と第2可動部とを互いに近接および離間させるためのシリンダ装置18と、を備え、第1可動部および第2可動部が互いに近接および離間する可動方向において、シリンダ装置は、第1可動部と第2可動部との間に配置されている。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを把持するための第1可動部および第2可動部と、
前記第1可動部と前記第2可動部とを互いに近接および離間させるためのシリンダ装置と、
を備え、
前記第1可動部および前記第2可動部が互いに近接および離間する可動方向において、前記シリンダ装置は、前記第1可動部と前記第2可動部との間に配置されている、チャック装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載のチャック装置であって、
前記シリンダ装置は、
前記可動方向に延在するシリンダ孔を有するシリンダボディと、
前記シリンダ孔に摺動可能に配置された第1ピストン部および第2ピストン部と、
前記第1ピストン部と前記第1可動部とを互いに連結する第1ロッドと、
前記第2ピストン部と前記第2可動部とを互いに連結する第2ロッドと、
を有し、
前記第1ピストン部と前記第2ピストン部とは、前記可動方向に並設されている、チャック装置。
【請求項3】
請求項2に記載のチャック装置であって、
前記第1可動部が前記第2可動部に近接する第1方向の前記第1ピストン部の第1推力は、前記第2可動部が前記第1可動部に近接する第2方向の前記第2ピストン部の第2推力よりも大きい、チャック装置。
【請求項4】
請求項3に記載のチャック装置であって、
前記第1ピストン部は、圧縮流体によって前記第1方向に押圧される第1受圧面を有し、
前記第2ピストン部は、圧縮流体によって前記第2方向に押圧される第2受圧面を有し、
前記第1受圧面の面積は、前記第2受圧面の面積よりも大きい、チャック装置。
【請求項5】
請求項4に記載のチャック装置であって、
前記シリンダボディには、前記シリンダ孔を前記シリンダボディの軸方向に仕切る中間壁部が取り付けられ、
前記中間壁部には、前記第1ロッドが挿通し、
前記第1ピストン部は、
前記中間壁部と前記第2ピストン部との間に位置した状態で前記第1ロッドに取り付けられた内側ピストンと、
前記中間壁部に対して前記内側ピストンとは反対方向に位置した状態で前記第1ロッドに取り付けられた外側ピストンと、
を含む、チャック装置。
【請求項6】
請求項4に記載のチャック装置であって、
前記第1受圧面の面積が前記第2受圧面の面積よりも大きくなるように、前記第1ロッドの外径が前記第2ロッドの外径よりも小さく形成されている、チャック装置。
【請求項7】
請求項3に記載のチャック装置であって、
前記第1可動部に接触して前記第1可動部の前記第1方向の移動限界位置を調整可能なアジャスタを取り付けるためのアジャスタ取付部を備える、チャック装置。
【請求項8】
請求項2に記載のチャック装置であって、
前記シリンダボディから前記第2可動部とは反対方向に向かって突出した第1支持部と、
前記第1支持部に設けられて前記第1可動部を案内する第1ガイド部と、
前記シリンダボディから前記第1可動部とは反対方向に向かって突出した第2支持部と、
前記第2支持部に設けられて前記第2可動部を案内する第2ガイド部と、
を備え、
前記第1支持部、前記シリンダボディおよび前記第2支持部は、一体成形品である、チャック装置。
【請求項9】
請求項8に記載のチャック装置であって、
前記シリンダ装置を駆動させるための圧縮流体を流通させるためのポートが前記第1支持部の外面と前記第2支持部の外面との各々に開口している、チャック装置。
【請求項10】
請求項3~9のいずれか1項に記載のチャック装置と、
前記シリンダ装置を駆動させるための圧縮流体を前記チャック装置に供給するための流体回路と、
を備える、チャックシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、チャック装置およびチャックシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特開2002-079486号公報には、ワークを把持するための第1可動部および第2可動部と、第1可動部および第2可動部を近接および離間させるためのシリンダ装置とを備えたチャック装置が開示されている。第1可動部および第2可動部は、シリンダ装置に対して、第1可動部および第2可動部が互いに近接および離間する可動方向と直交する方向(チャック装置の高さ方向)に配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2002-079486号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
チャック装置の高さ方向の寸法を抑えつつ第1可動部および第2可動部の最大開き幅を広くすることができるチャック装置およびチャックシステムが待望されている。
【0005】
本開示は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本開示の第1の態様は、ワークを把持するための第1可動部および第2可動部と、前記第1可動部と前記第2可動部とを互いに近接および離間させるためのシリンダ装置と、を備え、前記第1可動部および前記第2可動部が互いに近接および離間する可動方向において、前記シリンダ装置は、前記第1可動部と前記第2可動部との間に配置されている、チャック装置である。
【0007】
本開示の第2の態様は、第1の態様によるチャック装置と、前記シリンダ装置を駆動させるための圧縮流体を前記チャック装置に供給するための流体回路と、を備える、チャックシステムである。
【発明の効果】
【0008】
本開示によれば、シリンダ装置の高さ方向の寸法を抑えつつ第1可動部および第2可動部の最大開き幅を広くすることができる。
【図面の簡単な説明】
【0009】
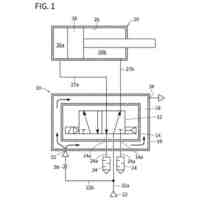
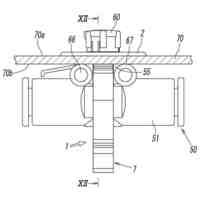
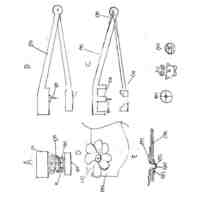
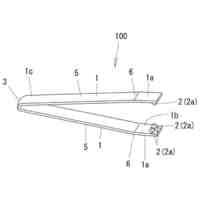
図1は、実施形態に係るチャック装置に第1把持部材および第2把持部材を取り付けた状態の斜視図である。
図2は、チャック装置の一部分解斜視図である。
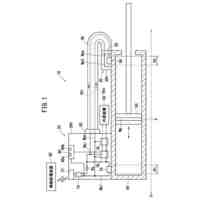
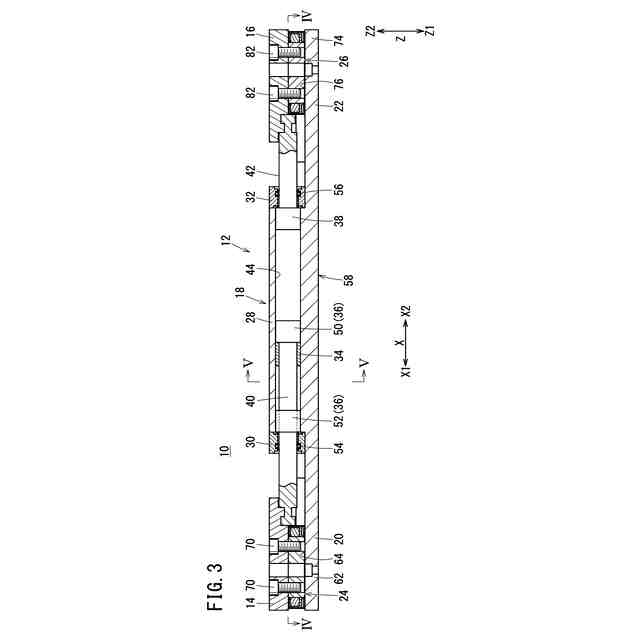
図3は、チャック装置の断面図である。
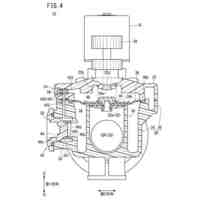
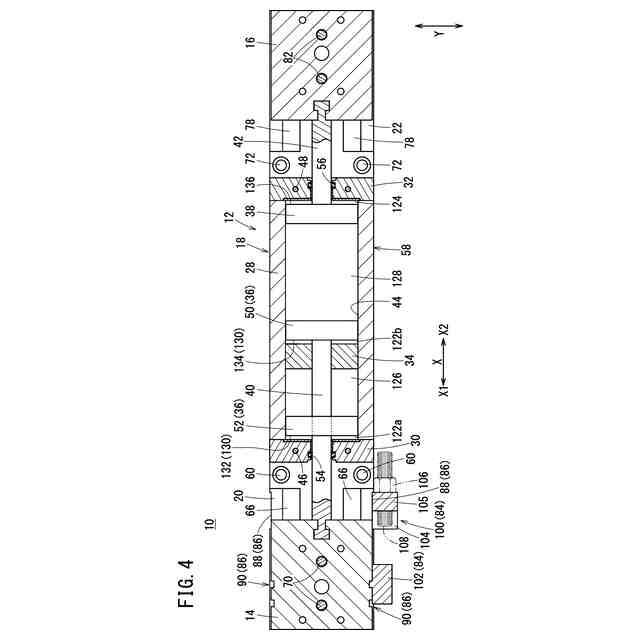
図4は、図3のIV-IV線に沿った断面図である。
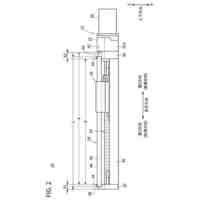
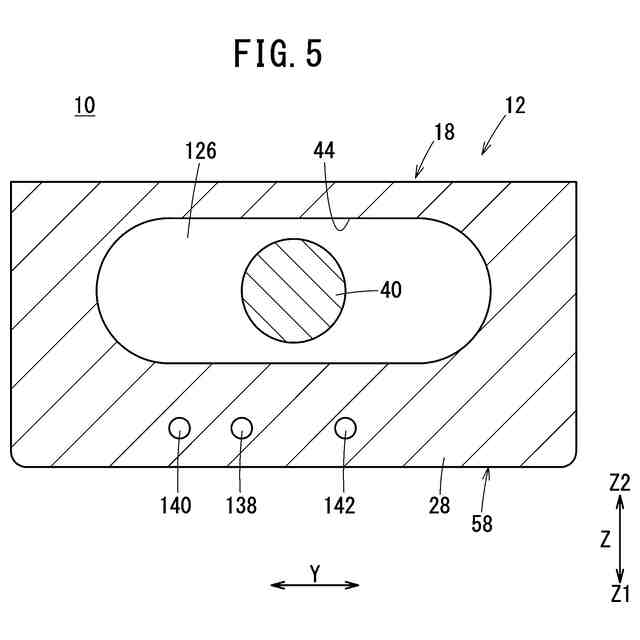
図5は、図3のV-V線に沿った断面図である。
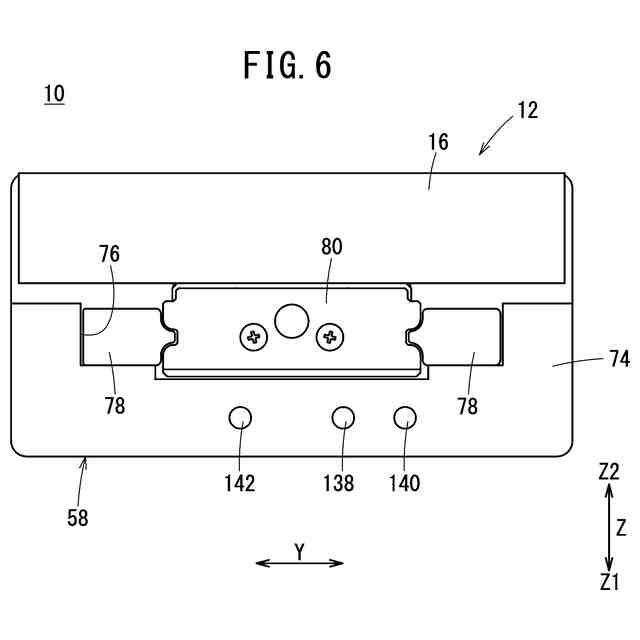
図6は、チャック装置の側面図である。
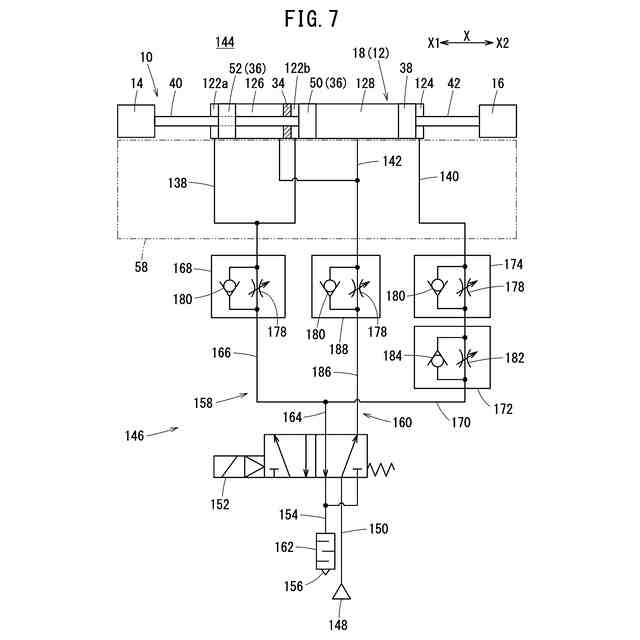
図7は、チャックシステムの模式図である。
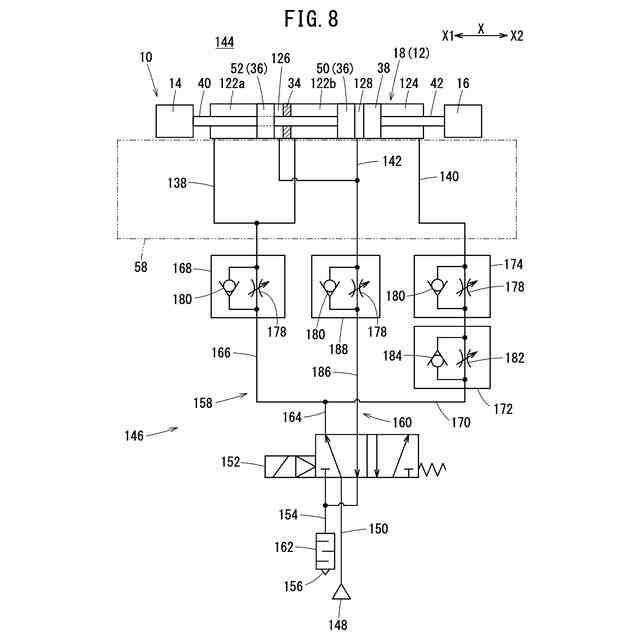
図8は、チャックシステムの模式図である。
図9は、チャック装置の動作説明図である。
図10は、チャック装置の動作説明図である。
図11は、チャック装置の動作説明図である。
図12は、チャック装置の動作説明図である。
図13は、変形例に係るシリンダ装置を備えたチャック装置の断面図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態に係るチャック装置10およびチャックシステム144について添付の図面を参照しながら説明する。図1は、実施形態に係るチャック装置10に第1把持部材300および第2把持部材302を取り付けた状態の斜視図である。図2は、チャック装置10の一部分解斜視図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
SMC株式会社
着脱装置
1か月前
SMC株式会社
バルブユニット
1か月前
SMC株式会社
電動アクチュエータ
1か月前
SMC株式会社
バルブユニット及び増圧弁
20日前
SMC株式会社
位置検出装置およびアクチュエータ
1か月前
SMC株式会社
チャック装置およびチャックシステム
7日前
SMC株式会社
アダプタ及びこれを用いた流量制御弁の取付構造
2か月前
SMC株式会社
イオナイザ用取付具、それを有するイオナイザ、及びそれを用いた取付構造
2日前
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
23日前
個人
手持ち挟持具
1日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
製函機
1か月前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
CKD株式会社
把持装置
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット操作装置
2か月前
川崎重工業株式会社
ハンド
27日前
SMC株式会社
着脱装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社マキタ
ハンマドリル
10日前
株式会社マキタ
ハンマドリル
10日前
株式会社ミクロブ
把持装置
1か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
27日前
トヨタ自動車株式会社
ロボット
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社安川電機
ロボット
7日前
川崎重工業株式会社
塗装システム
27日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
本田技研工業株式会社
装置
1か月前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
歩行ロボット
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ