TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025164539
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068570
出願日
2024-04-19
発明の名称
ロボット教示システムおよびロボット教示方法
出願人
パナソニックIPマネジメント株式会社
代理人
個人
主分類
B25J
9/22 20060101AFI20251023BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者の手指またはマーカペン等を用いた教示において、教示位置の位置精度を向上する。
【解決手段】ロボット教示システムは、ロボットの教示データの表示に用いられる教示点に対応する教示点データを記憶し、実環境と、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得し、表示装置に対して所定の位置関係となるように教示点を表示するための表示画像を生成して表示装置に出力し、ワークに対して作業者の空中操作を検出し、空中操作により指定された指定位置がワークの特徴点の近傍に指定された場合に教示点を表示するための表示画像を生成する。
【選択図】図3
特許請求の範囲
【請求項1】
実環境に存在するロボットの教示データを記憶する教示データ記憶部と、
前記教示データの表示に用いられる教示点に対応する教示点データを記憶する教示点記憶部と、
作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置と、
前記実環境と前記表示装置との相対的な位置関係を取得する位置関係取得部と、
前記相対的な位置関係と前記教示点データとに基づいて、前記表示装置に対して所定の位置関係となるように前記教示点を表示するための表示画像を生成する画像生成部と、
前記表示画像を前記表示装置に出力する出力部と、
前記実環境に存在するワークに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出する検出部と、
前記ワークの特徴点を認識する特徴点抽出部と、を備え、
前記画像生成部は、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成する、
ロボット教示システム。
続きを表示(約 2,400 文字)
【請求項2】
前記画像生成部は、前記空中操作により前記指定位置が前記特徴点の近傍に指定された場合に、前記指定位置および前記特徴点の位置のそれぞれに前記教示点の候補を表示した候補表示画像を生成し、
前記出力部は、前記候補表示画像を前記表示装置に表示し、
前記検出部は、前記候補表示画像に対して前記作業者が行った前記空中操作を検出し、
前記画像生成部は、前記空中操作により前記候補表示画像に表示された前記指定位置および前記特徴点の位置のうちいずれか1つを選択する操作を受け付けて、前記選択された前記指定位置または前記特徴点の位置に前記教示点を表示するための前記表示画像を生成する、
請求項1に記載のロボット教示システム。
【請求項3】
前記検出部は、前記ワークに対する前記空中の作業者の手指の姿勢を検出し、
前記画像生成部は、前記手指の姿勢により指定された前記指定位置における前記ロボットの姿勢を表示するための姿勢画像を生成し、
前記出力部は、前記表示装置に出力する、
請求項1に記載のロボット教示システム。
【請求項4】
実環境に存在するワークの3次元モデルを記憶するモデル記憶部と、
前記実環境に存在するロボットの教示データを記憶する教示データ記憶部と、
前記教示データの表示に用いられる教示点に対応する教示点データを記憶する教示点記憶部と、
作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置と、
前記実環境と前記表示装置との相対的な位置関係を取得する位置関係取得部と、
前記相対的な位置関係、前記3次元モデルおよび前記教示点データに基づいて、前記表示装置に対して所定の位置関係となるように前記3次元モデルおよび前記教示点を表示するための表示画像を生成する画像生成部と、
前記表示画像を前記表示装置に出力する出力部と、
前記表示装置に表示されている前記3次元モデルに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出する検出部と、
前記ワークの特徴点を認識する特徴点抽出部と、を備え、
前記画像生成部は、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成する、
ロボット教示システム。
【請求項5】
前記画像生成部は、前記空中操作により前記指定位置が前記特徴点の近傍に指定された場合に、前記指定位置および前記特徴点の位置のそれぞれを表示した候補表示画像を生成し、
前記出力部は、前記候補表示画像を前記表示装置に表示し、
前記検出部は、前記候補表示画像に対して前記作業者が行った前記空中操作を検出し、
前記画像生成部は、前記空中操作により前記候補表示画像に表示された前記指定位置および前記特徴点の位置のうちいずれか1つを選択する操作を受け付けて、前記選択された前記指定位置または前記特徴点の位置に前記教示点を表示するための前記表示画像を生成する、
請求項4に記載のロボット教示システム。
【請求項6】
前記検出部は、前記3次元モデルに対する前記空中の作業者の手指の姿勢を検出し、
前記画像生成部は、前記手指の姿勢により指定された前記指定位置における前記ロボットの姿勢を表示するための姿勢画像を生成し、
前記出力部は、前記表示装置に出力する、
請求項4に記載のロボット教示システム。
【請求項7】
少なくとも1つのコンピュータを備えるシステムが行うロボット教示方法であって、
実環境に存在するロボットの教示データと、前記教示データの表示に用いられる教示点に対応する教示点データとを記憶し、
前記実環境と、作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得し、
前記相対的な位置関係と前記教示点データとに基づいて、前記表示装置に対して所定の位置関係となるように前記教示点を表示するための表示画像を生成して、前記表示装置に出力し、
前記実環境に存在するワークに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出し、
前記ワークの特徴点を認識して、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成して前記表示装置に出力する、
ロボット教示方法。
【請求項8】
少なくとも1つのコンピュータを備えるシステムが行うロボット教示方法であって、
実環境に存在するワークの3次元モデルと、前記実環境に存在するロボットの教示データと、前記教示データの表示に用いられる教示点に対応する教示点データとを記憶し、
前記実環境と、作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得し、
前記相対的な位置関係、前記3次元モデルおよび前記教示点データに基づいて、前記表示装置に対して所定の位置関係となるように前記3次元モデルおよび前記教示点を表示するための表示画像を生成して、前記表示装置に出力し、
前記実環境に存在する前記3次元モデルに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出し、
前記ワークの特徴点を認識して、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成して前記表示装置に出力する、
ロボット教示方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット教示システムおよびロボット教示方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、人間の実演によって操作を実施するようにロボットをプログラミングするための方法が開示されている。この方法は、人間の手によってワークに対する操作を実演し、ワークに対する操作を実演する手のカメラ画像をコンピュータによって分析して、実演データを作成し、新たなワークのカメラ画像を分析して、新たなワークの初期の位置および向きを判定し、ロボットに新たなワークに対する操作を実施させるために、実演データと、新たなワークの初期の位置および向きとに基づいてロボット運動コマンドを生成し、ロボットによって新たなワークに対する操作を実施する。
【先行技術文献】
【特許文献】
【0003】
特開2021-167060号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、作業者の手指またはマーカペン等を用いた教示において、教示位置の位置精度を向上するロボット教示システムおよびロボット教示方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本開示は、実環境に存在するロボットの教示データを記憶する教示データ記憶部と、前記教示データの表示に用いられる教示点に対応する教示点データを記憶する教示点記憶部と、作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置と、前記実環境と前記表示装置との相対的な位置関係を取得する位置関係取得部と、前記相対的な位置関係と前記教示点データとに基づいて、前記表示装置に対して所定の位置関係となるように前記教示点を表示するための表示画像を生成する画像生成部と、前記表示画像を前記表示装置に出力する出力部と、前記実環境に存在するワークに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出する検出部と、前記ワークの特徴点を認識する特徴点抽出部と、を備え、前記画像生成部は、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成する、ロボット教示システムを提供する。
【0006】
また、本開示は、実環境に存在するワークの3次元モデルを記憶するモデル記憶部と、前記実環境に存在するロボットの教示データを記憶する教示データ記憶部と、前記教示データの表示に用いられる教示点に対応する教示点データを記憶する教示点記憶部と、作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置と、前記実環境と前記表示装置との相対的な位置関係を取得する位置関係取得部と、前記相対的な位置関係、前記3次元モデルおよび前記教示点データに基づいて、前記表示装置に対して所定の位置関係となるように前記3次元モデルおよび前記教示点を表示するための表示画像を生成する画像生成部と、前記表示画像を前記表示装置に出力する出力部と、前記表示装置に表示されている前記3次元モデルに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出する検出部と、前記ワークの特徴点を認識する特徴点抽出部と、を備え、前記画像生成部は、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成する、ロボット教示システムを提供する。
【0007】
また、本開示は、少なくとも1つのコンピュータを備えるシステムが行うロボット教示方法であって、実環境に存在するロボットの教示データと、前記教示データの表示に用いられる教示点に対応する教示点データとを記憶し、前記実環境と、作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得し、前記相対的な位置関係と前記教示点データとに基づいて、前記表示装置に対して所定の位置関係となるように前記教示点を表示するための表示画像を生成して、前記表示装置に出力し、前記実環境に存在するワークに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出し、前記ワークの特徴点を認識して、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成して前記表示装置に出力する、ロボット教示方法を提供する。
【0008】
また、本開示は、少なくとも1つのコンピュータを備えるシステムが行うロボット教示方法であって、実環境に存在するワークの3次元モデルと、前記実環境に存在するロボットの教示データと、前記教示データの表示に用いられる教示点に対応する教示点データとを記憶し、前記実環境と、作業者に装着可能に構成され、画像を前記実環境の画像または前記実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得し、前記相対的な位置関係、前記3次元モデルおよび前記教示点データに基づいて、前記表示装置に対して所定の位置関係となるように前記3次元モデルおよび前記教示点を表示するための表示画像を生成して、前記表示装置に出力し、前記実環境に存在する前記3次元モデルに対して前記表示装置から離れた空中で作業者が行った操作である空中操作を検出し、前記ワークの特徴点を認識して、前記空中操作により指定された指定位置が前記特徴点の近傍に指定された場合に前記教示点を表示するための前記表示画像を生成して前記表示装置に出力する、ロボット教示方法を提供する。
【発明の効果】
【0009】
本開示によれば、作業者の手指またはマーカペン等を用いた教示において、教示位置の位置精度を向上できる。
【図面の簡単な説明】
【0010】
実施の形態に係る溶接教示システムの一例を示す図
MRデバイスおよび処理装置の内部構成例を示す図
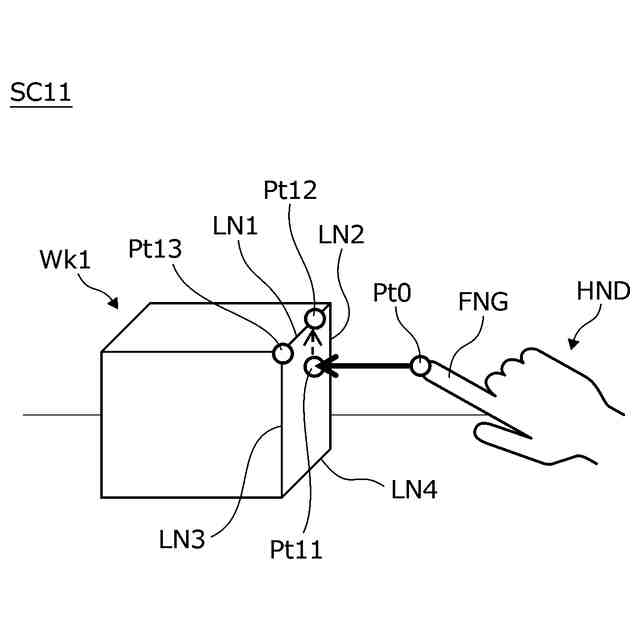
指先教示方式の一例を説明する図
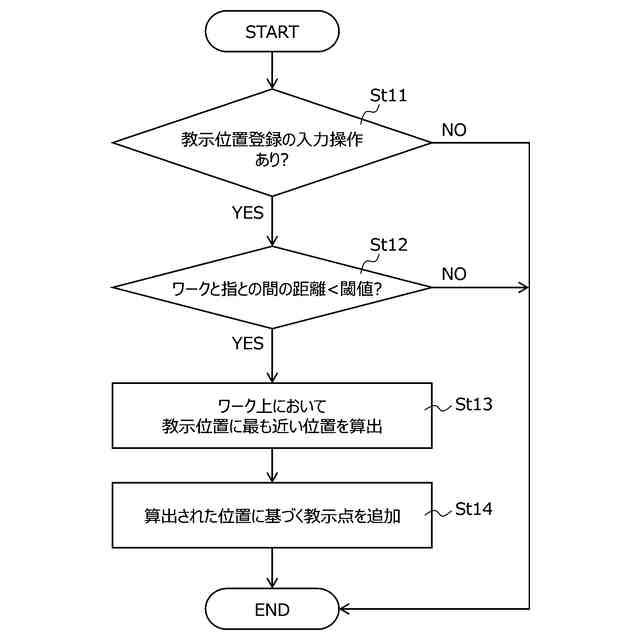
実施の形態におけるMRデバイスの指先教示方式による教示位置の教示手順例を示すフローチャート
遠隔点教示方式の一例を説明する図
教示位置の他の教示方法および他の補正方法を説明する図
教示姿勢の教示例1を説明する図
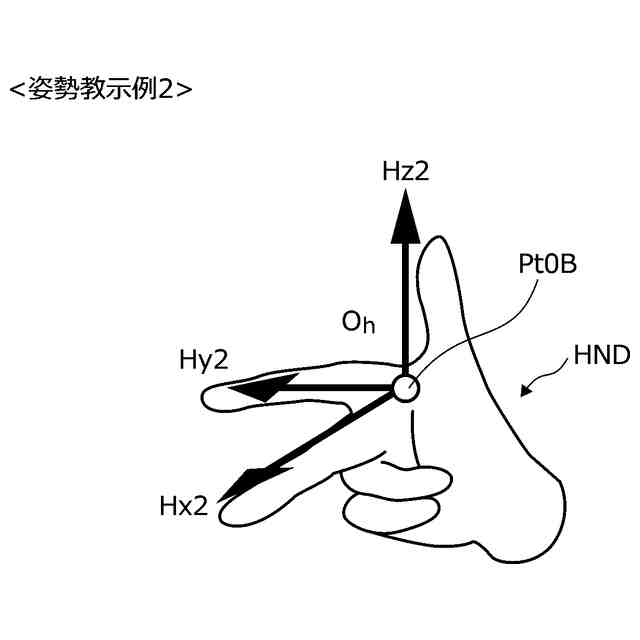
教示姿勢の教示例2を説明する図
教示姿勢の教示例3を説明する図
実施の形態におけるMRデバイスの動作手順例を示すフローチャート
実施の形態におけるMRデバイスの指先教示方式による教示手順例を示すフローチャート
実施の形態におけるMRデバイスの遠隔点教示方式による教示手順例を示すフローチャート
実施の形態におけるMRデバイスの姿勢教示処理手順例を示すフローチャート
実施の形態におけるMRデバイスの姿勢算出処理手順例を示すフローチャート
作業者が視認する複合現実空間の一例を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
18日前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
1か月前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボットシステム
2か月前
川崎重工業株式会社
ハンド
22日前
株式会社不二越
ロボット操作装置
1か月前
株式会社マキタ
ハンマドリル
5日前
SMC株式会社
着脱装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社マキタ
ハンマドリル
5日前
株式会社ミクロブ
把持装置
1か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
22日前
トヨタ自動車株式会社
ロボット
25日前
ARMA株式会社
ジョイントフレーム
2か月前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
本田技研工業株式会社
装置
1か月前
川崎重工業株式会社
塗装システム
22日前
株式会社不二越
ロボットシステム
1か月前
株式会社安川電機
ロボット
2日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
25日前
アネックスツール株式会社
ドライバービット
29日前
ダイハツ工業株式会社
移載治具
2か月前
トヨタ自動車株式会社
ロボットハンド
2日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
工機ホールディングス株式会社
作業機
22日前
ライオン株式会社
移載システム
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ