TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165117
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024068998
出願日
2024-04-22
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/16 20200101AFI20251027BHJP(車両一般)
要約
【課題】先々行車及び先行車が存在する場合に先々行車が減速したときに先行車の減速が遅れたとしても、先々行車の減速に応じて適切に車両制御が実行される可能性を高め、且つ、不要な車両制御が実行される可能性を低減できる車両制御装置を提供する。
【解決手段】車両制御装置は、物体との衝突リスクが閾値以上となったとの衝突条件が成立した場合、衝突リスクを低減するための車両制御を実行する。車両制御装置は、先行車が先々行車を追従しているとの追従条件、及び、自車両及び先行車が先々行車軌跡を走行しているとの軌跡条件、の両方が成立した場合、先々行車の衝突リスクを表す第1指標値を用いて衝突条件が成立したか否かを判定し、追従条件及び軌跡条件の少なくとも一方が成立しない場合、先行車の衝突リスクを表す第2指標値を用いて衝突条件が成立したか否かを判定する。
【選択図】 図3
特許請求の範囲
【請求項1】
物体との衝突リスクが閾値以上となったとの衝突条件が成立した場合、前記衝突リスクを低減するための車両制御を実行する車両制御装置において、
前記車両制御装置は、
前記自車両の前方に存在する先行車が前記先行車の前方に存在する先々行車を追従しているとの追従条件、及び、前記先々行車が走行した軌跡を表す先々行車軌跡を前記自車両及び前記先行車が走行しているとの軌跡条件、の両方が成立した場合、前記先々行車の衝突リスクを表す第1指標値を用いて前記衝突条件が成立したか否かを判定し、
前記追従条件及び前記軌跡条件の少なくとも一方が成立しない場合、前記先行車の衝突リスクを表す第2指標値を用いて前記衝突条件が成立したか否かを判定する、
ように構成された、車両制御装置。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記車両制御装置は、前記先行車が前記先々行車と同じ車線を走行し、且つ、前記先々行車と前記先行車との間の車間距離が閾値距離以下であるか又は前記先行車が前記車間距離を走行するのにかかる車間時間が閾値時間以下である場合、前記追従条件が成立したと判定するように構成された、車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記車両制御装置は、
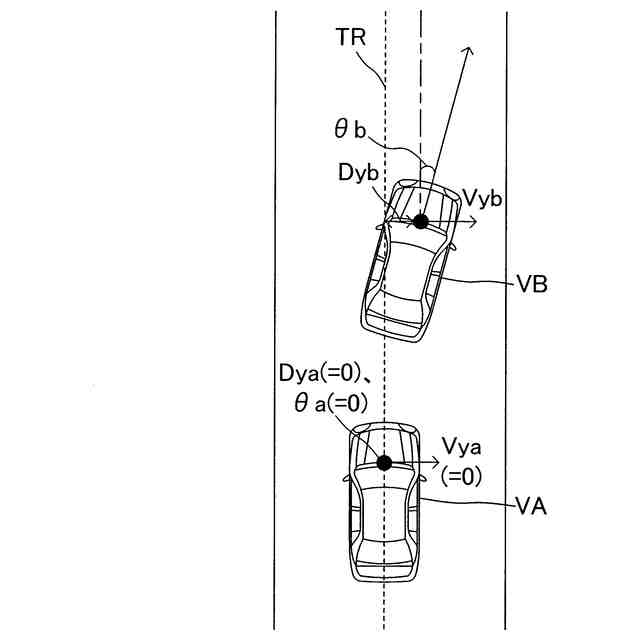
前記先行車の前記先々行車軌跡に対する横距離が閾値横距離以下であり、前記先行車の横速度が閾値横速度以下であり、且つ、前記先行車の前記先々行車軌跡に対する偏向角が閾値角以下であるとの第1条件、及び、
前記自車両の前記先々行車軌跡に対する横距離が閾値横距離以下であり、前記自車両の横速度が閾値横速度以下であり、且つ、前記自車両の前記先々行車軌跡に対する偏向角が閾値角以下であるとの第2条件、
の両方が成立した場合、前記軌跡条件が成立したと判定するように構成された、車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
前記車両制御装置は、
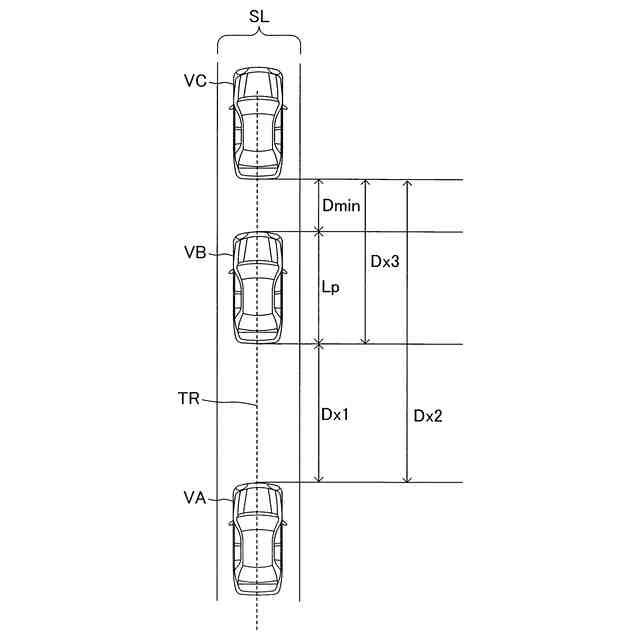
前記追従条件及び前記軌跡条件の両方が成立した場合、前記先行車の車長を表す車長値、及び、前記先行車が前記先々行車を追従している場合の最低の車間距離を表す最低車間距離値の合計値を前記自車両と前記先々行車との間の車間距離から減算した減算値を、前記先々行車の前記自車両に対する相対速度で除算した値を前記第1指標値として用い、
前記追従条件及び前記軌跡条件の少なくとも一方が成立しない場合、前記自車両と前記先行車との間の先行車車間距離を前記先行車の前記自車両に対する相対速度で除算した値を前記第2指標値として用いる、
ように構成された、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体との衝突リスクが閾値以上となったとの衝突条件が成立した場合、衝突リスクを低減するための車両制御を実行する車両制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、物体との衝突リスクが高くなった場合に、衝突リスクを低減するための車両制御(運転者への警報及び減速制御等)を実行する車両制御装置が知られている。例えば、特許文献1に記載の車両制御装置(以下、「従来装置」と称呼する。)は、先行車及び先々行車が存在する場合において、以下の条件1及び条件2の両方が成立するか否かを判定する。
条件1:先行車と先々行車との間の車間距離が閾値未満であること。
条件2:先行車速から先々行車速を減じた減算値が閾値以上であること。
【0003】
条件1及び条件2の両方が成立した場合、先行車と先々行車との間の車間距離が接近し、且つ、先行車が先々行車に急接近する可能性が高い。この場合、従来装置は、予めブレーキ油圧を高め制動準備を行う。これにより、先行車が先々行車の存在により急ブレーキをかけるような場合でもレスポンスの良いブレーキ制御が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2004-106588号公報
【発明の概要】
【0005】
先々行車が減速した場合に先々行車がレーンチェンジを行うと、先々行車の減速が先行車に伝搬しない。このような場合であっても上記条件1及び条件2が成立し得る。このため、先々行車が減速した場合に先行車がレーンチェンジを行うと、上記条件1及び条件2が成立することにより行われた上記制動準備は不要となる可能性が高い。
【0006】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、先々行車及び先行車が存在する場合に先々行車が減速したときに先行車の減速が遅れたとしても、先々行車の減速に応じて適切に車両制御が実行される可能性を高め、且つ、不要な車両制御が実行される可能性を低減できる車両制御装置を提供することにある。
【0007】
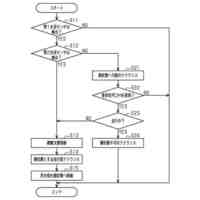
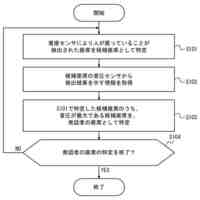
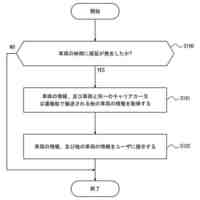
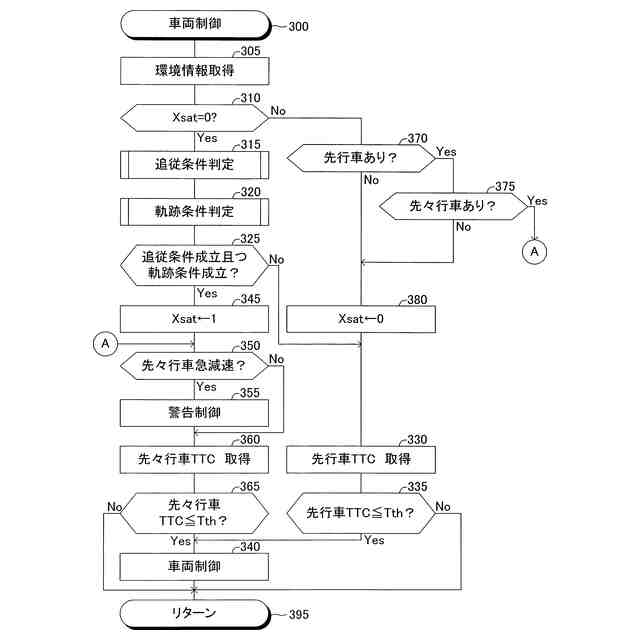
本発明の車両制御装置(以下、「本発明装置」と称呼する。)は、物体との衝突リスクが閾値以上となったとの衝突条件が成立した場合(ステップ335「Yes」、ステップ365「Yes」)、前記衝突リスクを低減するための車両制御を実行する(ステップ340)。
前記車両制御装置は、
前記自車両の前方に存在する先行車が前記先行車の前方に存在する先々行車を追従しているとの追従条件、及び、前記先々行車が走行した軌跡を表す先々行車軌跡を前記自車両及び前記先行車が走行しているとの軌跡条件、の両方が成立した場合(ステップ325「Yes」)、前記先々行車の衝突リスクを表す第1指標値(先々行車TTC)を用いて前記衝突条件が成立したか否かを判定し(ステップ365)、
前記追従条件及び前記軌跡条件の少なくとも一方が成立しない場合(ステップ325「No」)、前記先行車の衝突リスクを表す第2指標値(先行車TTC)を用いて前記衝突条件が成立したか否かを判定する(ステップ335)、
ように構成されている。
【0008】
本発明装置は、追従条件及び軌跡条件の両方が成立した場合、先々行車の衝突リスクを表す第1指標値を用いて車両制御を実行するか否かを判定する。追従条件及び軌跡条件の両方が成立した場合、先々行車が減速した場合に先行車がレーンチェンジを行わずに減速する可能性が高い。つまり、先々行車の減速が先行車に伝搬する可能性が高い。従って、本発明装置によれば、先々行車が減速した場合に、先行車がレーンチェンジを行ったために不要な車両制御を実行する可能性を低減することができる。更に、本発明装置によれば、先々行車が減速した場合に先行車が遅れて減速した場合であっても適切に車両制御を実行できる可能性を高めることができる。
【図面の簡単な説明】
【0009】
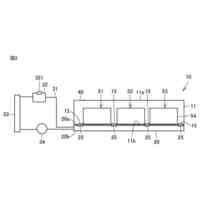
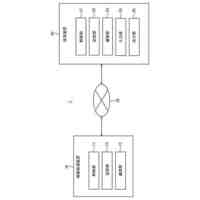
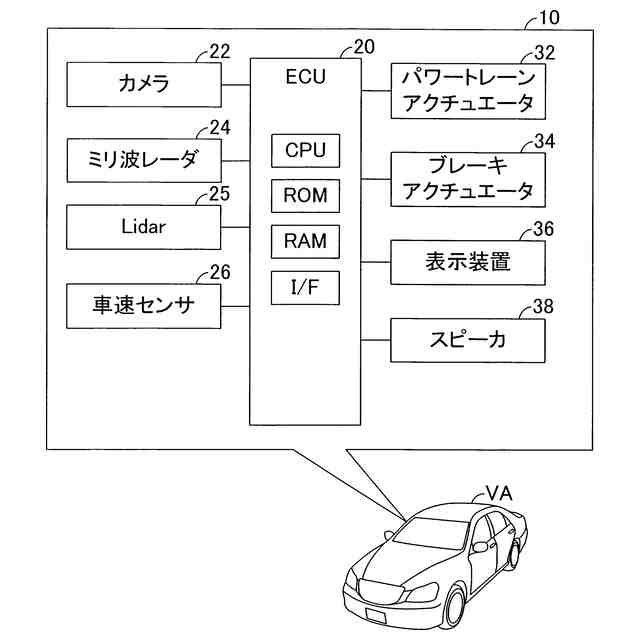
本発明の実施形態に係る車両制御装置の概略構成図である。
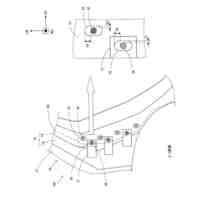
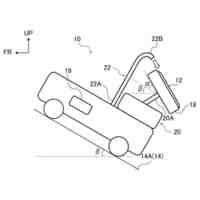
自車両、先行車及び先々行車の距離関係の説明図である。
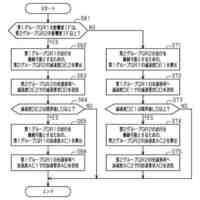
図1に示したECUのCPUが実行する車両制御ルーチンのフローチャートである。
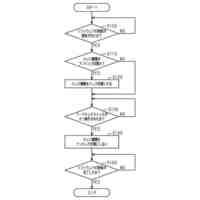
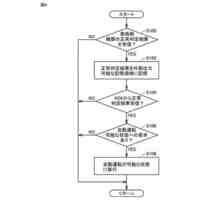
図1に示したECUのCPUが実行する追従条件判定サブルーチンのフローチャートである。
図1に示したECUのCPUが実行する軌跡条件判定サブルーチンのフローチャートである。
自車両及び先行車の横距離、偏向角及び横速度の説明図である。
【発明を実施するための形態】
【0010】
図1に示したように、本実施形態に係る車両制御装置(以下、「本装置10」と称呼する。)は、自車両VAに適用され、図1に示した構成要素を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車体
18日前
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
方法
25日前
トヨタ自動車株式会社
車体
2日前
トヨタ自動車株式会社
方法
17日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
治具
10日前
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
椅子
25日前
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
22日前
トヨタ自動車株式会社
方法
25日前
トヨタ自動車株式会社
車両
24日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電磁弁
25日前
トヨタ自動車株式会社
蓄電池
2日前
トヨタ自動車株式会社
モータ
17日前
トヨタ自動車株式会社
自動車
16日前
トヨタ自動車株式会社
電動車
25日前
トヨタ自動車株式会社
モータ
23日前
トヨタ自動車株式会社
サーバ
12日前
トヨタ自動車株式会社
正極層
15日前
トヨタ自動車株式会社
モータ
1日前
トヨタ自動車株式会社
モータ
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ