TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094664
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210358
出願日
2023-12-13
発明の名称
ショベル
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250618BHJP(水工;基礎;土砂の移送)
要約
【課題】アタッチメントの円滑な動きを実現できるショベルを提供すること。
【解決手段】ショベル100は、下部走行体1と、下部走行体1に旋回可能に搭載された上部旋回体3と、上部旋回体3に取り付けられたブーム4及びアーム5を含むアタッチメントATと、予め設定された目標軌道に沿ってバケット6の爪先6aを移動させるようにブーム4及びアーム5を動作させるコントローラ30とを備えている。コントローラ30は、目標軌道上のバケット6の爪先6aの目標移動速度に基づいてブーム4及びアーム5のそれぞれの目標動作速度を決定するように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回可能に搭載された上部旋回体と、
前記上部旋回体に取り付けられたブーム及びアームを含むアタッチメントと、
目標軌道に沿って前記アタッチメントの所定部位を移動させるように前記ブーム及び前記アームを動作させる制御装置と、を備え、
前記制御装置は、前記目標軌道上の前記アタッチメントの所定部位の目標移動速度に基づいて前記ブーム及び前記アームのそれぞれの目標動作速度を決定する、
ことを特徴とするショベル。
続きを表示(約 690 文字)
【請求項2】
前記アタッチメントを操作するための操作装置の操作内容を検出する操作内容検出装置を備え、
前記制御装置は、前記操作内容検出装置が検出した前記操作装置の操作内容に基づいて前記目標軌道上の前記アタッチメントの所定部位の目標移動速度を決定する、
請求項1に記載のショベル。
【請求項3】
作業負荷の大きさを検出する負荷検出装置を備え、
前記制御装置は、前記操作内容検出装置が検出した前記操作装置の操作内容と前記負荷検出装置が検出した作業負荷の大きさとに基づいて前記目標軌道上の前記アタッチメントの所定部位の目標移動速度を決定する、
請求項2に記載のショベル。
【請求項4】
前記制御装置は、前記負荷検出装置が検出した作業負荷が大きいほど、前記目標軌道上の前記アタッチメントの所定部位の目標移動速度を小さくする、
請求項3に記載のショベル。
【請求項5】
前記制御装置は、
駆動源が出力可能な出力パワーよりも、前記アタッチメントを動かす際に消費される消費パワーが小さいときには、前記操作装置の操作量が大きいほど、前記目標軌道上の前記アタッチメントの所定部位の目標移動速度を大きくし、
駆動源が出力可能な出力パワーよりも、前記アタッチメントを動かす際に消費される消費パワーが大きくなるときには、前記操作装置の操作量が大きくなっても、前記目標軌道上の前記アタッチメントの所定部位の目標移動速度を大きくしない、
請求項2乃至4の何れかに記載のショベル。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ショベルに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、操作者が手動でアーム閉じ操作を行ってアームシリンダを伸縮させる場合に、目標施工面とバケットの爪先とが一致するようにブームシリンダを自動的に伸縮させるショベルが知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-165253号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のショベルは、ブーム及びアームを含むアタッチメントの姿勢と目標施工面との関係によってはアームシリンダの伸縮速度に見合ったブームシリンダの伸縮速度を実現することが難しく、アタッチメントの円滑な動きを実現できなくなってしまうおそれがある。
【0005】
そこで、アタッチメントの円滑な動きを実現できるショベルを提供することが望ましい。
【課題を解決するための手段】
【0006】
本開示の実施形態に係るショベルは、下部走行体と、前記下部走行体に旋回可能に搭載された上部旋回体と、前記上部旋回体に取り付けられたブーム及びアームを含むアタッチメントと、予め設定された目標軌道に沿って前記アタッチメントの所定部位を移動させるように前記ブーム及び前記アームを動作させる制御装置と、を備え、前記制御装置は、前記目標軌道上の前記アタッチメントの所定部位の目標移動速度に基づいて前記ブーム及び前記アームのそれぞれの目標動作速度を決定する。
【発明の効果】
【0007】
上述のショベルは、アタッチメントの円滑な動きを実現できる。
【図面の簡単な説明】
【0008】
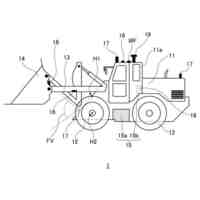
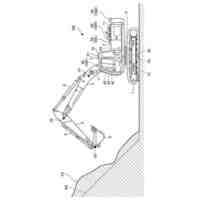
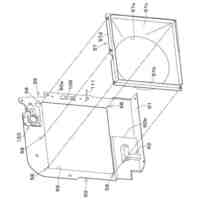
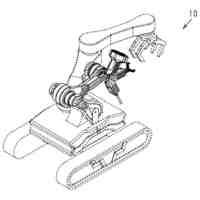
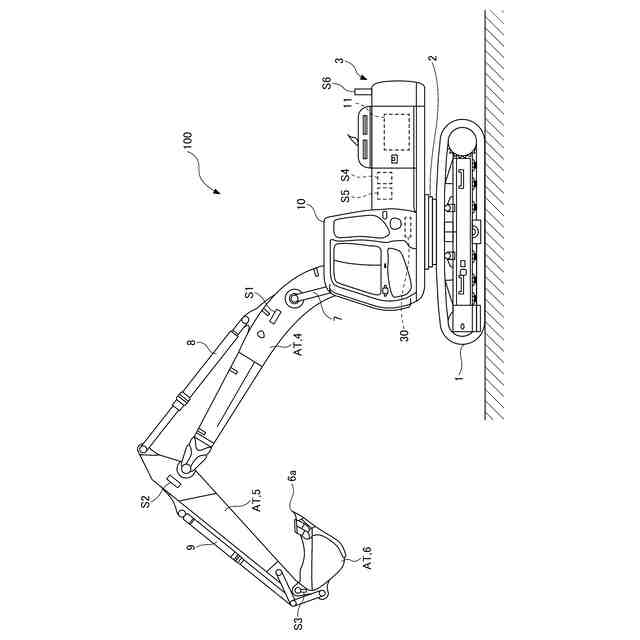
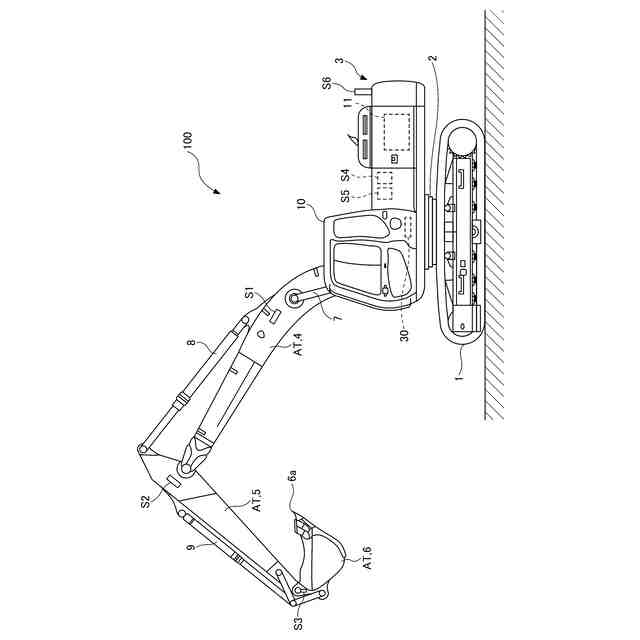
本開示の実施形態に係るショベルの側面図である。
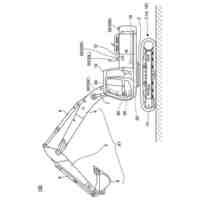
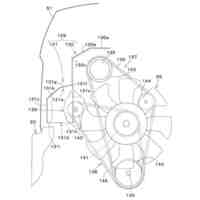
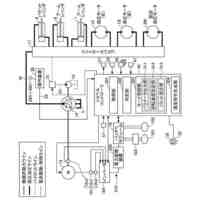
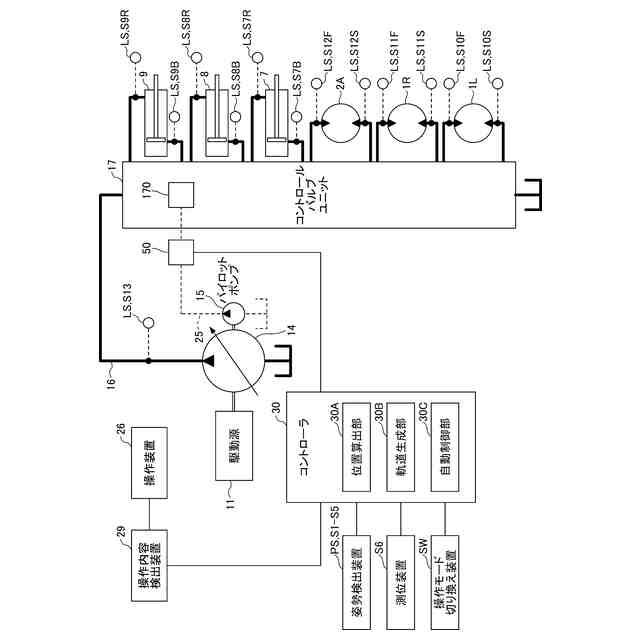
図1のショベルに搭載される駆動系の構成例を示す図である。
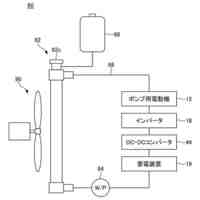
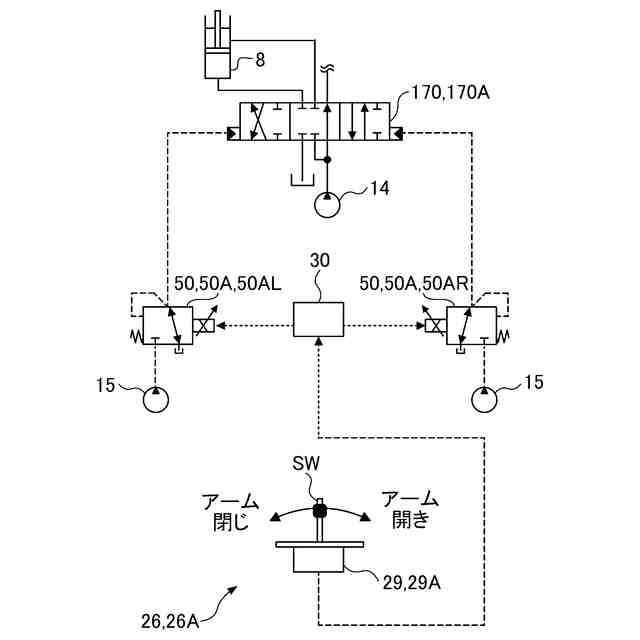
油圧アクチュエータに関する油圧回路の概略図である。
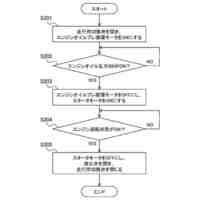
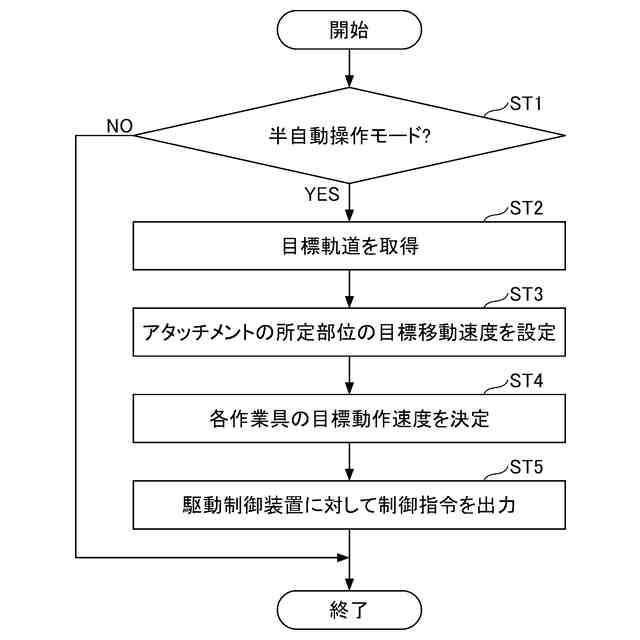
軌道速度基準制御の流れの一例を示すフローチャートである。
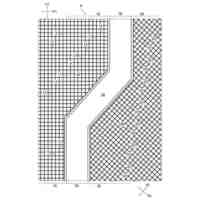
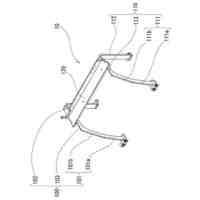
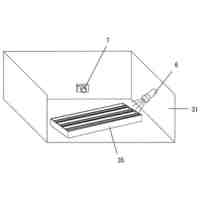
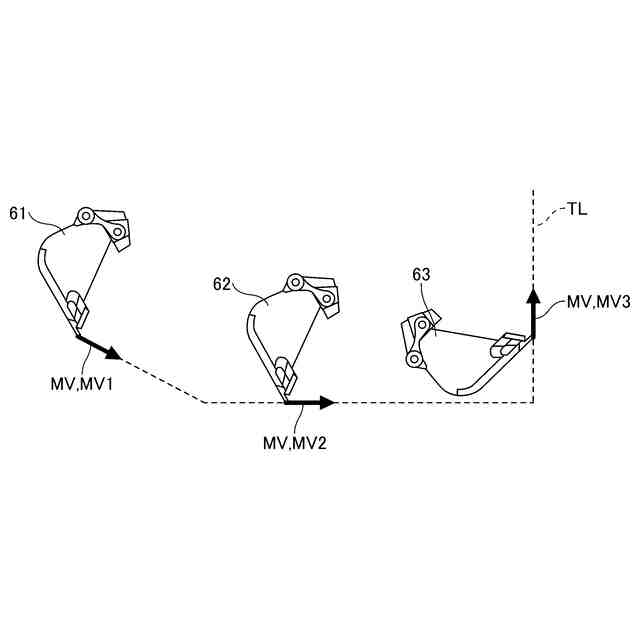
ショベルによる掘削作業が行われるときの目標軌道の一例を示す図である。
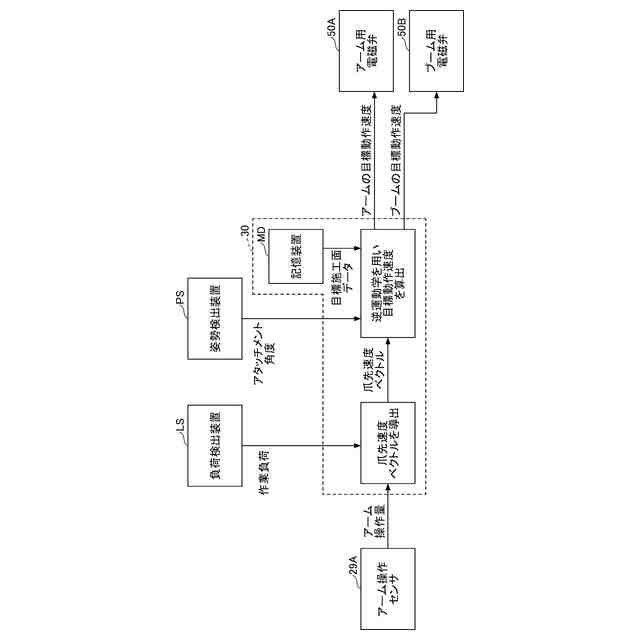
軌道速度基準制御の一例のデータフロー図である。
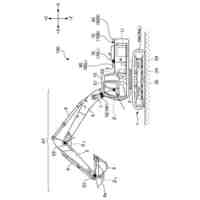
遠隔操作システムの一例を示す概略図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して発明を実施するための形態について説明する。図1は、本開示の実施形態に係る建設機械の一例である掘削機としてのショベル100の側面図である。図2は、図1のショベル100の駆動系の構成例を示す図である。図2において、機械的動力系は二重線、作動油ラインは太実線、パイロットラインは破線、電気駆動・制御系は細実線でそれぞれ示される。
【0010】
図1に示すように、ショベル100の下部走行体1には旋回機構2を介して上部旋回体3が旋回可能に搭載されている。上部旋回体3には作業具としてのブーム4が取り付けられている。ブーム4の先端には作業具としてのアーム5が取り付けられ、アーム5の先端には作業具としてのエンドアタッチメントが取り付けられている。図示例では、アーム5の先端にはエンドアタッチメントとしてバケット6が取り付けられているが、アーム5の先端にはエンドアタッチメントとしてグラップル、ブレーカ、又はリフティングマグネット等が取り付けられていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
FKS株式会社
擁壁
2日前
株式会社forch
土採取装置
3日前
戸田建設株式会社
覆土材
21日前
戸田建設株式会社
緑化覆土材
21日前
株式会社竹中工務店
杭基礎構造
10日前
株式会社大林組
作業機械
17日前
住友建機株式会社
ショベル
1日前
住友建機株式会社
ショベル
1日前
住友建機株式会社
ショベル
9日前
住友建機株式会社
ショベル
1日前
株式会社竹中工務店
建物の基礎構造
15日前
株式会社クボタ
作業機
15日前
株式会社クボタ
作業機
15日前
株式会社クボタ
作業機
15日前
株式会社クボタ
作業機
15日前
株式会社テノックス九州
地盤改良方法
8日前
株式会社クボタ
作業機
15日前
日立建機株式会社
作業機械
8日前
住友建機株式会社
電動ショベル
8日前
株式会社クボタ
作業機
15日前
ナブテスコ株式会社
ショベルカー
8日前
住友重機械工業株式会社
ショベル
2日前
エバタ株式会社
下水道施設の再構築方法
1日前
株式会社大林組
山留め工事の支援方法
15日前
大成建設株式会社
杭基礎構造
2日前
前田工繊株式会社
救助用ネット装置
21日前
日鉄建材株式会社
カゴ枠、及び河川堤防の補強構造
9日前
株式会社大林組
基礎梁の再利用方法及び建築物
4日前
ジャパンパイル株式会社
杭
4日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業車両
1日前
強化土エンジニヤリング株式会社
地盤強化工法
22日前
ヒロセ株式会社
支持杭と受桁の接合構造
21日前
大和ハウス工業株式会社
補強用鉄筋籠および作製方法
1日前
日立建機株式会社
作業機械
22日前
株式会社ジオベクトル
補強土壁工法
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ