TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097409
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2023213587
出願日
2023-12-19
発明の名称
自動走行車、自動走行車の制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/244 20240101AFI20250624BHJP(制御;調整)
要約
【課題】直進方向に延びる磁気ラインに他の磁気ラインが交差する走行路においても、指示通り直進することができる自動走行車を提供する。
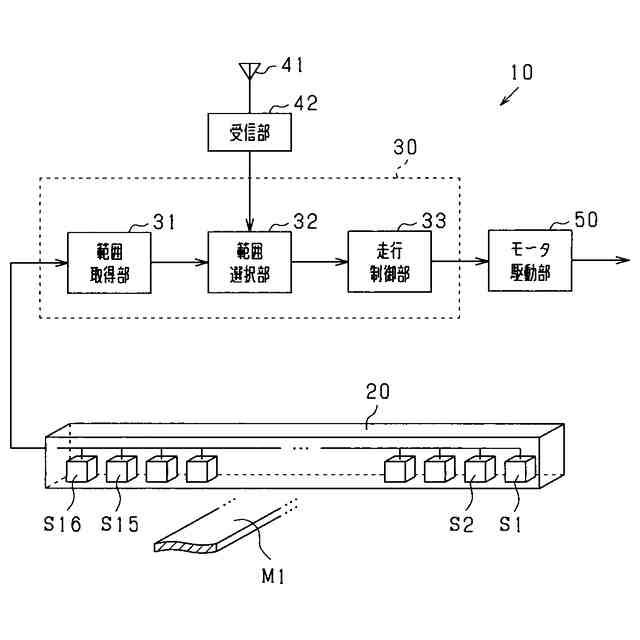
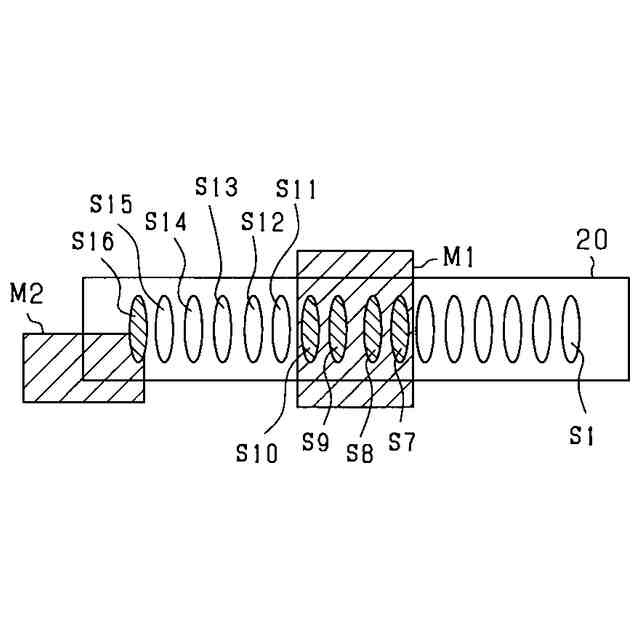
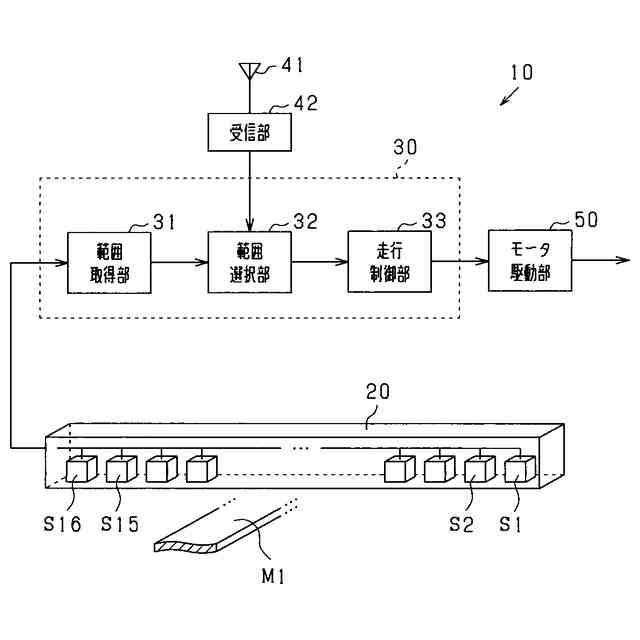
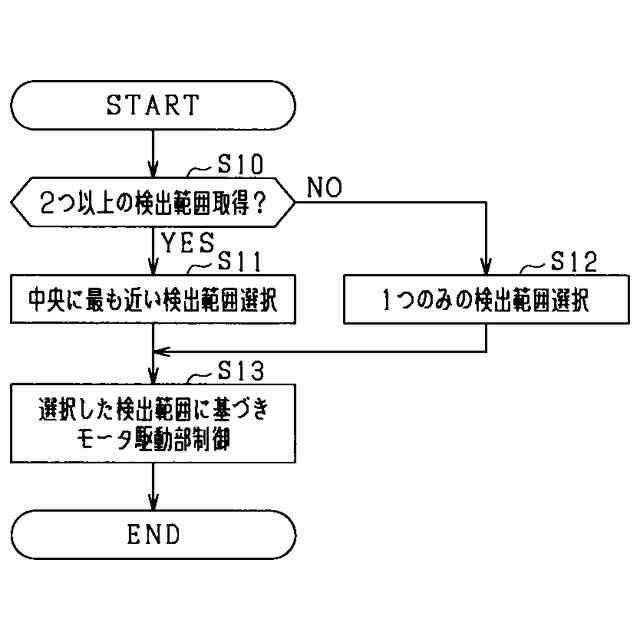
【解決手段】自動走行車(10)は、左右方向に配列された複数の磁気センサ(S1~S16)を備え、走行路に設けられた帯状の磁気ラインを複数の磁気センサにより検出した結果に基づいて、磁気ラインに沿って走行する。範囲取得部(31)は、磁気ラインを検出した磁気センサが連続している範囲である検出範囲を取得する。範囲選択部(32)は、自動走行車が直進指示されている時に範囲取得部により取得された検出範囲が複数存在する場合に、自動走行車の直進方向に延びる磁気ラインに対応すると予測した1つの検出範囲を選択する。走行制御部(33)は、範囲選択部により選択された1つの検出範囲の左右方向の中央と自動走行車の左右方向の中央とを近付けるように自動走行車の走行状態を制御する。
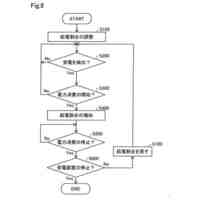
【選択図】 図8
特許請求の範囲
【請求項1】
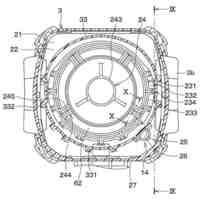
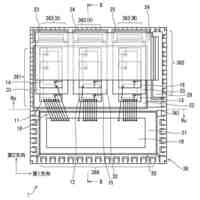
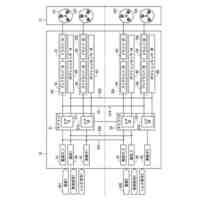
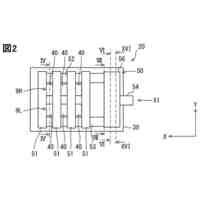
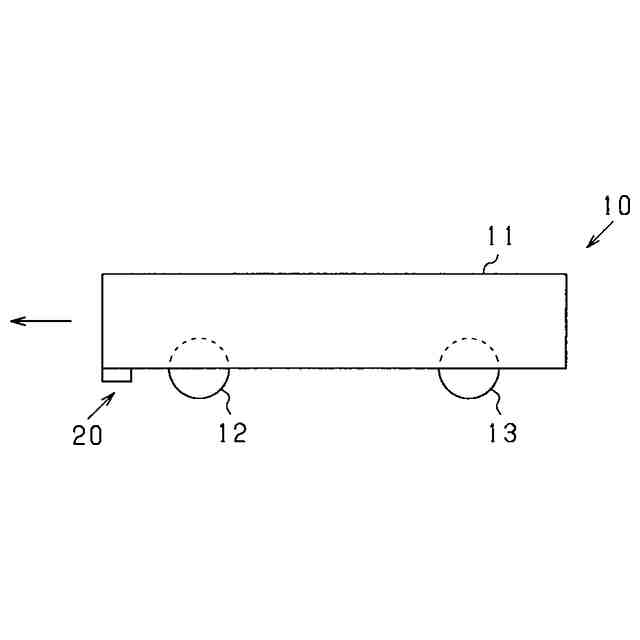
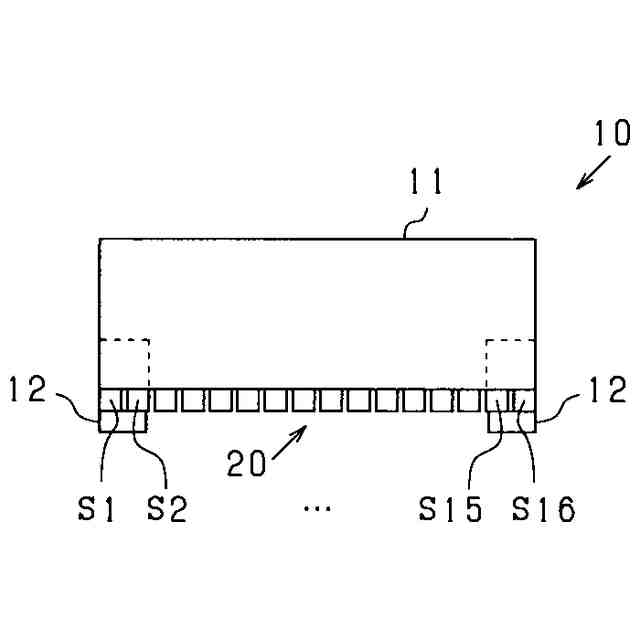
左右方向に配列された複数の磁気センサ(S1~S16)を備え、走行路に設けられた帯状の磁気ラインを前記複数の磁気センサにより検出した結果に基づいて、前記磁気ラインに沿って走行する自動走行車(10)であって、
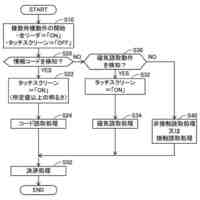
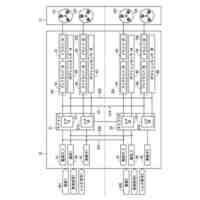
前記磁気ラインを検出した前記磁気センサが連続している範囲である検出範囲を取得する範囲取得部(31)と、
前記自動走行車が直進指示されている時に前記範囲取得部により取得された前記検出範囲が複数存在する場合に、前記自動走行車の直進方向に延びる前記磁気ラインに対応すると予測した1つの前記検出範囲を選択する範囲選択部(32)と、
前記範囲選択部により選択された前記1つの前記検出範囲の左右方向の中央と前記自動走行車の左右方向の中央とを近付けるように前記自動走行車の走行状態を制御する走行制御部(33)と、
を備える自動走行車。
続きを表示(約 1,100 文字)
【請求項2】
前記範囲選択部は、前記自動走行車が直進指示されている時に前記範囲取得部により取得された複数の前記検出範囲のうち、前記自動走行車の左右方向の中央に最も近い1つの前記検出範囲を前記予測した1つの前記検出範囲として選択する、請求項1に記載の自動走行車。
【請求項3】
前記範囲選択部は、前記自動走行車が直進指示されている時に前記範囲取得部により取得された複数の前記検出範囲のうち、前記自動走行車の左右方向の中央に最も近く且つ最も範囲が広い1つの前記検出範囲を前記予測した1つの前記検出範囲として選択する、請求項2に記載の自動走行車。
【請求項4】
前記範囲選択部は、前記自動走行車が直進指示されている時に前記範囲取得部により取得された複数の前記検出範囲のうち、前記自動走行車の左右方向の中央に最も近い1つの前記検出範囲と最も範囲が広い1つの前記検出範囲とが異なる場合に、前記自動走行車の左右方向の中央に最も近い1つの前記検出範囲を前記予測した1つの前記検出範囲として選択する、請求項3に記載の自動走行車。
【請求項5】
前記範囲選択部は、前記自動走行車が直進指示されている時に前記範囲取得部により取得された複数の前記検出範囲のうち、最も範囲が広い1つの前記検出範囲を前記予測した1つの前記検出範囲として選択する、請求項1に記載の自動走行車。
【請求項6】
前記範囲選択部は、前記自動走行車が直進指示されている時に前記範囲取得部により取得された前記検出範囲が1つのみ存在する場合に、前記1つのみ存在する前記検出範囲を選択する、請求項1~5のいずれか1項に記載の自動走行車。
【請求項7】
左右方向に配列された複数の磁気センサ(S1~S16)を備え、走行路に設けられた帯状の磁気ラインを前記複数の磁気センサにより検出した結果に基づいて、前記磁気ラインに沿って走行する自動走行車(10)、に適用される制御プログラムであって、
前記磁気ラインを検出した前記磁気センサが連続している範囲である検出範囲を取得する処理と、
前記自動走行車が直進指示されている時に前記取得された前記検出範囲が複数存在する場合に、前記自動走行車の直進方向に延びる前記磁気ラインに対応すると予測した1つの前記検出範囲を選択する処理と、
前記選択された前記1つの前記検出範囲の左右方向の中央と前記自動走行車の左右方向の中央とを近付けるように前記自動走行車の走行状態を制御する処理と、
をコンピュータ(30)に実行させる、自動走行車の制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、磁気ラインにより誘導される自動走行車に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば、左右方向に配列された複数の磁気センサを備え、複数の磁気センサは磁気テープの直上に位置する磁気センサだけがオンするように設定され、オンとなっている磁気センサの範囲(以下「オン範囲」という)を検出し、オン範囲の中央を示す信号を出力する自動走行車がある(特許文献1参照)。特許文献1に記載の自動走行車は、直進時にオン範囲の中央と自動走行車の左右方向の中央とを一致させるように、左右の動輪の回転速度をそれぞれ制御している。
【先行技術文献】
【特許文献】
【0003】
特開平8-44426号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
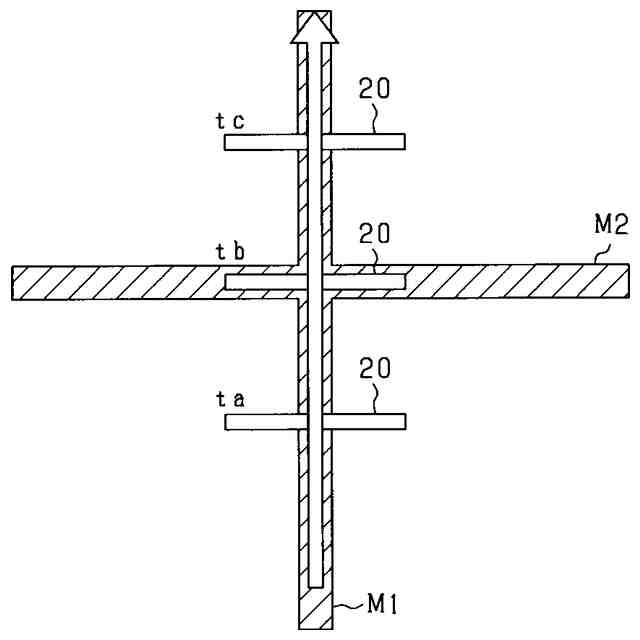
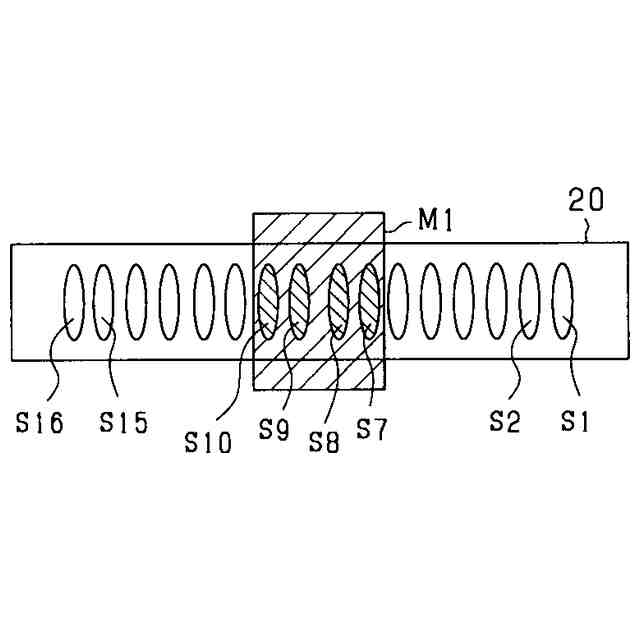
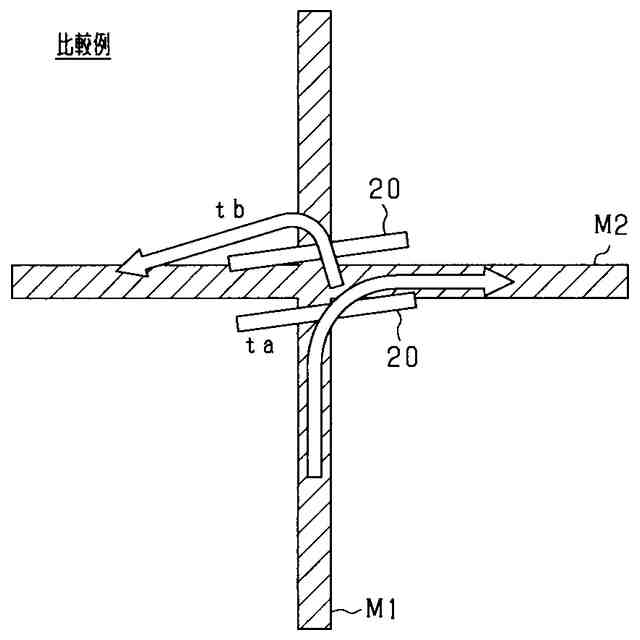
ところで、自動走行車が直進指示されている時に、自動走行車が磁気テープ(磁気ライン)の十字路にやや斜めに進入すると、以下の問題が生じることが判明した。すなわち、直進方向に延びる磁気テープを中央付近の磁気センサが検出してオンになるとともに、左右方向に延びる磁気テープを端付近の磁気センサが検出してオンになる。この場合、中央付近のオン範囲及び端付近のオン範囲とそれらの間の範囲とを合わせた範囲全体の中央と自動走行車の左右方向の中央とを一致させようとすると、端付近でオンになった磁気センサの方向へ自動走行車の進行方向が変化する。その結果、自動走行車は直進せず、左右方向に延びる磁気テープに沿って曲がることがある。
【0005】
なお、こうした実情は、磁気テープの十字路に限らず、直進方向に延びる磁気テープに他の磁気テープが交差する走行路では概ね共通している。
【0006】
本発明は、上記課題を解決するためになされたものであり、その主たる目的は、直進方向に延びる磁気ラインに他の磁気ラインが交差する走行路においても、指示通り直進することができる自動走行車を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するための第1の手段は、
左右方向に配列された複数の磁気センサ(S1~S16)を備え、走行路に設けられた帯状の磁気ラインを前記複数の磁気センサにより検出した結果に基づいて、前記磁気ラインに沿って走行する自動走行車(10)であって、
前記磁気ラインを検出した前記磁気センサが連続している範囲である検出範囲を取得する範囲取得部(31)と、
前記自動走行車が直進指示されている時に前記範囲取得部により取得された前記検出範囲が複数存在する場合に、前記自動走行車の直進方向に延びる前記磁気ラインに対応すると予測した1つの前記検出範囲を選択する範囲選択部(32)と、
前記範囲選択部により選択された前記1つの前記検出範囲の左右方向の中央と前記自動走行車の左右方向の中央とを近付けるように前記自動走行車の走行状態を制御する走行制御部(33)と、
を備える。
【0008】
上記構成によれば、自動走行車は、左右方向に配列された複数の磁気センサを備え、走行路に設けられた帯状の磁気ラインを前記複数の磁気センサにより検出した結果に基づいて、前記磁気ラインに沿って走行する。
【0009】
ここで、範囲取得部は、前記磁気ラインを検出した前記磁気センサが連続している範囲である検出範囲を取得する。このため、前記磁気ラインを検出した前記磁気センサが複数存在し、それらの磁気センサが連続していない(互いに離れている)場合は、それらの磁気センサは別々の検出範囲として取得される。なお、前記磁気ラインを検出した1つのみの前記磁気センサも、検出範囲として取得される。すなわち、検出範囲は、必ずしも複数の磁気センサを含んでいなくてもよい。
【0010】
範囲選択部は、前記自動走行車が直進指示されている時に前記範囲取得部により取得された前記検出範囲が複数存在する場合に、前記自動走行車の直進方向に延びる前記磁気ラインに対応すると予測した1つの前記検出範囲を選択する。このため、直進方向に延びる磁気ラインに他の磁気ラインが交差する場合に、複数の検出範囲及びそれらの間の範囲を合わせた範囲全体を検出範囲とみなすのではなく、前記自動走行車の直進方向に延びる前記磁気ラインに対応する1つの前記検出範囲を予測して選択することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
発音器
4日前
株式会社デンソー
電子装置
5日前
株式会社デンソーウェーブ
決済端末
11日前
株式会社デンソー
制御装置
5日前
株式会社デンソー
検出装置
9日前
株式会社デンソー
電子装置
5日前
株式会社デンソー
撮像装置
5日前
株式会社デンソー
熱交換器
5日前
株式会社デンソー
冷却装置
5日前
株式会社デンソー
通信装置
5日前
株式会社デンソー
受電装置
10日前
株式会社デンソー
電子装置
4日前
株式会社デンソー
電子装置
4日前
株式会社デンソー
熱交換器
12日前
株式会社デンソー
受電装置
2日前
株式会社デンソー
レーダ装置
9日前
株式会社デンソー
圧電センサ
11日前
株式会社デンソー
電流センサ
16日前
株式会社デンソー
半導体装置
9日前
株式会社デンソー
電子制御装置
16日前
株式会社デンソー
状態推定装置
16日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
電源切替回路
16日前
株式会社デンソーウェーブ
情報読取装置
9日前
株式会社デンソー
燃料噴射装置
10日前
株式会社デンソー
データ処理装置
10日前
株式会社デンソー
スパークプラグ
5日前
株式会社デンソー
モータ制御装置
5日前
株式会社デンソー
モータ制御装置
5日前
株式会社デンソー
ブラシレスモータ
12日前
株式会社デンソーウェーブ
作業管理システム
3日前
株式会社デンソーウェーブ
食事管理システム
2日前
株式会社デンソー
半導体装置の製造方法
4日前
株式会社デンソー
タイヤ空気圧監視システム
4日前
株式会社デンソーウェーブ
携帯端末及び管理システム
12日前
トヨタ自動車株式会社
制御装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ