TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025098439
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023214562
出願日
2023-12-20
発明の名称
キャリブレーション装置及びそれを備えた搬送ロボット
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
13/62 20060101AFI20250625BHJP(制御;調整)
要約
【課題】キャリブレーション対象である駆動対象物のキャリブレーションを精度良く行うことが可能なキャリブレーション装置及びそれを備えた搬送ロボットを提供すること。
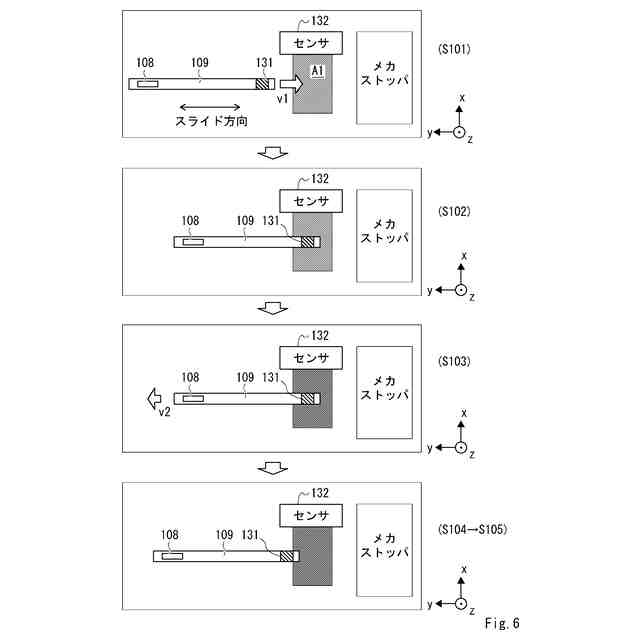
【解決手段】本開示に係るキャリブレーション装置は、駆動対象物を第1速度で第1方向にスライド又は回転させることによって、センサによる検知対象物の検知から未検知、及び、未検知から検知、の一方の遷移を検出した場合、第1速度よりも遅い第2速度で、第1方向とは逆の第2方向にスライド又は回転させることによって、センサによる検知対象物の検知から未検知、及び、未検知から検知、の他方の遷移を検出するとともに、他方の遷移を検出したタイミングにおける駆動対象物の位置を基準位置として設定する。
【選択図】図6
特許請求の範囲
【請求項1】
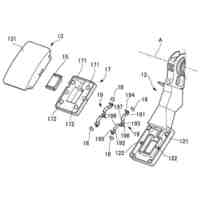
スライド可能又は回転可能に構成された駆動対象物、及び、当該駆動対象物が取り付けられた筐体、の一方に設置された検知対象物と、
前記駆動対象物及び前記筐体の他方に設置され、前記検知対象物を検知可能なセンサと、
前記センサによる前記検知対象物の検知状況に応じて、前記駆動対象物の前記筐体における基準位置を設定する設定部と、
を備えた、キャリブレーション装置であって、
前記設定部は、前記駆動対象物を第1速度で第1方向にスライド又は回転させることによって、前記センサによる前記検知対象物の検知から未検知、及び、未検知から検知、の一方の遷移を検出した場合、前記第1速度よりも遅い第2速度で、前記第1方向とは逆の第2方向にスライド又は回転させることによって、前記センサによる前記検知対象物の検知から未検知、及び、未検知から検知、の他方の遷移を検出するとともに、前記他方の遷移を検出したタイミングにおける前記駆動対象物の位置を前記基準位置として設定する、
キャリブレーション装置。
続きを表示(約 410 文字)
【請求項2】
前記検知対象物は、メカストッパであって、
前記センサは、
前記メカストッパに接触したか否かを検知する感圧センサと、
前記感圧センサが前記メカストッパに接触した場合の衝撃を吸収するバネと、を有する、
請求項1に記載のキャリブレーション装置。
【請求項3】
前記センサは、フォトリフレクタである、
請求項1に記載のキャリブレーション装置。
【請求項4】
請求項1に記載のキャリブレーション装置と、
前記駆動対象物と、
筐体と、
を備えた、搬送ロボット。
【請求項5】
前記駆動対象物を駆動する駆動部をさらに備え、
前記キャリブレーション装置は、前記駆動部に前記駆動対象物をスライド又は回転させることによって、前記駆動対象物の前記基準位置を設定する、
請求項4に記載の搬送ロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、キャリブレーション装置及びそれを備えた搬送ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
一般的に、モータ等によって駆動される駆動対象物による高精度な動作を実現するために、駆動対象物のキャリブレーションを精度良く行うことが求められている。換言すると、駆動対象物の基準位置を精度良く設定することが求められている。例えば、特許文献1には、一方向に沿って所定範囲内を移動可能な絞り体が基準位置に配置されていることを電気的又は光学的手段により検出する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-242917号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された装置では、電気的又は光学的手段により検出される絞り体の検出範囲に幅がある場合、精度良く基準位置を検出することができない、という課題があった。つまり、特許文献1に開示された装置では、精度良くキャリブレーションを行うことができない、という課題があった。
【0005】
本開示は、以上の背景に鑑みなされたものであり、キャリブレーション対象である駆動対象物のキャリブレーションを精度良く行うことが可能な、キャリブレーション装置及びそれを備えた搬送ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
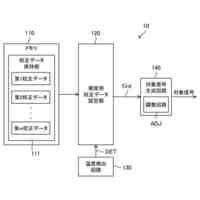
本開示に係るキャリブレーション装置は、スライド可能又は回転可能に構成された駆動対象物、及び、当該駆動対象物が取り付けられた筐体、の一方に設置された検知対象物と、前記駆動対象物及び前記筐体の他方に設置され、前記検知対象物を検知可能なセンサと、前記センサによる前記検知対象物の検知状況に応じて、前記駆動対象物の前記筐体における基準位置を設定する設定部と、を備えた、キャリブレーション装置であって、前記設定部は、前記駆動対象物を第1速度で第1方向にスライド又は回転させることによって、前記センサによる前記検知対象物の検知から未検知、及び、未検知から検知、の一方の遷移を検出した場合、前記第1速度よりも遅い第2速度で、前記第1方向とは逆の第2方向にスライド又は回転させることによって、前記センサによる前記検知対象物の検知から未検知、及び、未検知から検知、の他方の遷移を検出するとともに、前記他方の遷移を検出したタイミングにおける前記駆動対象物の位置を前記基準位置として設定する。このキャリブレーション装置は、センサによって検出される検出対象物の検出範囲に幅がある場合でも、駆動対象物の基準位置を精度良く設定することができる。つまり、このキャリブレーション装置は、センサによって検出される検出対象物の検出範囲に幅がある場合でも、キャリブレーション対象である駆動対象物のキャリブレーションを精度良く行うことができる。
【0007】
前記検知対象物は、メカストッパであって、前記センサは、前記メカストッパに接触したか否かを検知する感圧センサと、前記感圧センサが前記メカストッパに接触した場合の衝撃を吸収するバネと、を有していてもよい。
【0008】
前記センサは、フォトリフレクタであってもよい。
【0009】
本開示に係る搬送ロボットは、上記のキャリブレ-ション装置と、前記駆動対象物と、筐体と、を備える。この搬送ロボットは、センサによって検出される検出対象物の検出範囲に幅がある場合でも、駆動対象物の基準位置を精度良く設定することができる。
【0010】
前記駆動対象物を駆動する駆動部をさらに備え、前記キャリブレーション装置は、前記駆動部に前記駆動対象物をスライド又は回転させることによって、前記駆動対象物の前記基準位置を設定してもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
17日前
株式会社ダイヘン
移動体
22日前
ローム株式会社
半導体集積回路
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
17日前
株式会社オプトン
制御プログラム生成装置
15日前
キヤノン電子株式会社
加工装置、及び、制御方法
2日前
株式会社鷺宮製作所
制御装置
16日前
株式会社ダイフク
物品搬送設備
15日前
株式会社ダイフク
物品搬送設備
15日前
株式会社ダイヘン
負荷時タップ切換器
22日前
株式会社ダイフク
物品搬送設備
8日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
28日前
オムロン株式会社
安全装置
15日前
シンフォニアテクノロジー株式会社
異常検知装置
15日前
三菱電機株式会社
電源回路
2日前
株式会社計数技研
移動体、及びプログラム
1か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイフク
飛行体制御システム
4日前
株式会社日立製作所
製造工程管理システム
16日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社大林組
作業機械の自動運転制御システム
1か月前
株式会社豊田自動織機
無人搬送車両
25日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
1か月前
株式会社FUJI
工作機械
18日前
株式会社東芝
監視制御システム及び監視制御方法
3日前
横河電機株式会社
電流出力装置
1か月前
オークラ輸送機株式会社
走行車および自律走行方法
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
オークラ輸送機株式会社
走行車および走行車システム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ