TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025098738
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023215072
出願日
2023-12-20
発明の名称
車両制御装置
出願人
ダイハツ工業株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B60L
15/20 20060101AFI20250625BHJP(車両一般)
要約
【課題】駆動力のアンバランスを抑制する技術を提供すること。
【解決手段】少なくとも1つのプロセッサを備え、車両に設けられる2つ以上の駆動輪にそれぞれ接続された複数のモータを速度指令により制御する車両制御装置であって、前記プロセッサは、複数の前記モータのそれぞれの駆動力の差を算出し、前記駆動力の差又は比が特定の目標値に一致するように、前記速度指令の値を補正する補正量を算出する。
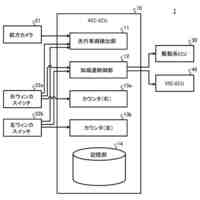
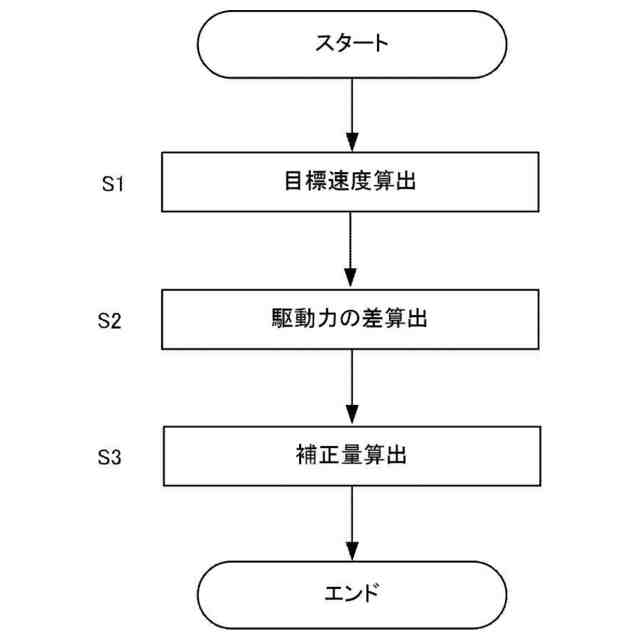
【選択図】図3
特許請求の範囲
【請求項1】
少なくとも1つのプロセッサを備え、車両に設けられる2つ以上の駆動輪にそれぞれ接続された複数のモータを速度指令により制御する車両制御装置であって、
前記プロセッサは、
複数の前記モータのそれぞれの駆動力の差を算出し、
前記駆動力の差又は比が特定の目標値に一致するように、前記速度指令の値を補正する補正量を算出する、車両制御装置。
続きを表示(約 470 文字)
【請求項2】
前記プロセッサは、特定の値以下となるように前記補正量に制限を加える、請求項1に記載の車両制御装置。
【請求項3】
前記プロセッサは、前記車両の旋回半径の推定に支障が生じた場合、前記制限を緩和し、又は前記制限を非実行とする、請求項2に記載の車両制御装置。
【請求項4】
前記プロセッサは、前記車両の旋回半径の推定に支障が生じた場合、前記補正量の補正ゲインを増加させる、請求項1から3の何れか一項に記載の車両制御装置。
【請求項5】
前記プロセッサは、複数の前記モータ又は前記2つ以上の駆動輪の回転数が、特定値以下の場合、前記補正量の算出を不実行とし、前記回転数が前記特定値を超える場合、前記補正量の算出を実行する、請求項1に記載の車両制御装置。
【請求項6】
前記プロセッサは、前記回転数が前記特定値以下の場合、前記速度指令の値の前記補正量による補正を不実行とし、前記回転数が前記特定値を超える場合、前記補正を実行する、請求項5に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
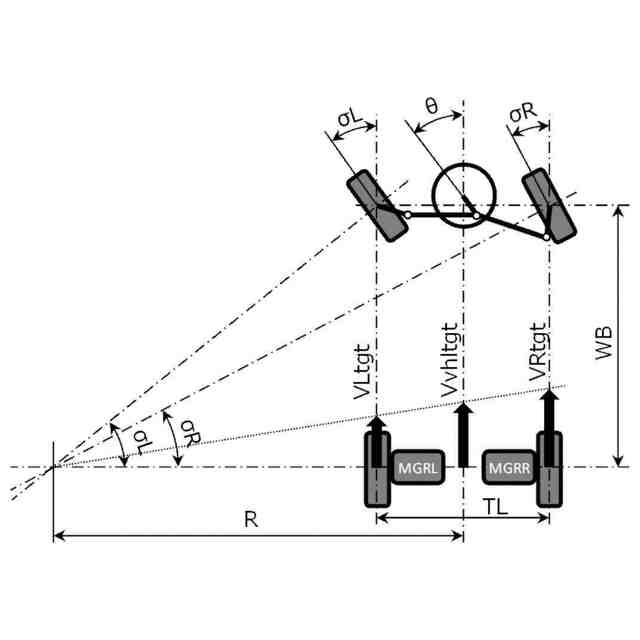
車両に設けられる2つ以上の駆動輪にそれぞれ接続された複数のモータを速度指令により制御する場合、車両旋回時の各駆動輪の対地速度は、それぞれ異なるため、各モータに同一の目標速度を設定すると、駆動力のアンバランスが発生し得る。具体的には、前輪又は後輪の間のデフ(デファレンシャルギア)をロックすると、旋回時に左右輪の間に循環トルクが発生し、また4WD車でセンタデフをロックすると、旋回時に前後輪の間で循環トルクが発生する。これと同じことが電気的に起こり得る。循環トルクを防止するため、特許文献1に開示される従来技術は、操舵角に応じて各駆動輪の目標速度、つまり目標モータ回転数を補正し、外駆動輪の目標速度に対し、内駆動輪には「内駆動輪旋回半径/外駆動輪旋回半径」で求まる値を掛けた目標速度を設定することで、循環トルクによるタイヤの踏ん張り、引きずり等を抑制している。
【先行技術文献】
【特許文献】
【0003】
特開2015-192570号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、複数の駆動輪の内、1つの駆動輪のタイヤ空気圧が低下した場合、当該駆動輪のみ、タイヤ有効径が小さくなるため、車両が直進状態でも当該駆動輪の回転数を他の駆動輪の回転数よりも高くする必要がある。ところが従来技術の制御では、実際に車両が直進する状況で、複数の駆動輪に接続されているモータの目標回転数が同じであるため、当該駆動輪は回生勝手となり、車速を維持するため他の駆動輪の駆動力(つまり駆動トルク)が高くなることで、駆動力のアンバランスが生じるという課題がある。このように従来技術では、駆動力のアンバランスを抑制する上で改善の余地がある。
【0005】
本開示は、駆動力のアンバランスを抑制する技術を提供する。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、少なくとも1つのプロセッサを備え、車両に設けられる2つ以上の駆動輪にそれぞれ接続された複数のモータを速度指令により制御する車両制御装置であって、前記プロセッサは、複数の前記モータのそれぞれの駆動力の差を算出し、前記駆動力の差又は比が特定の目標値に一致するように、前記速度指令の値を補正する補正量を算出する。
【発明の効果】
【0007】
本開示によれば、駆動力のアンバランスを抑制できる。
【図面の簡単な説明】
【0008】
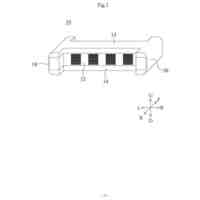
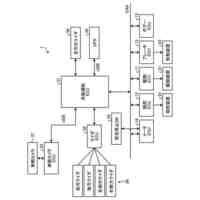
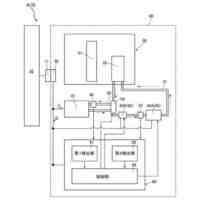
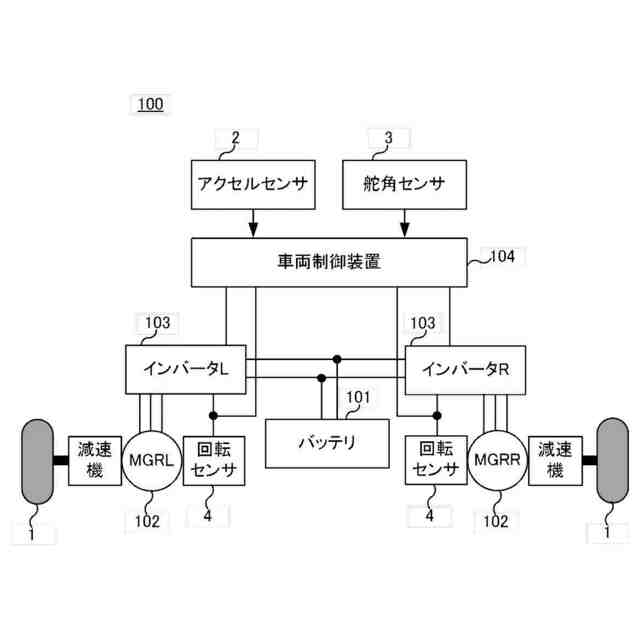
図1は本開示の実施形態にかかる車両制御装置を含む車両の構成図である。
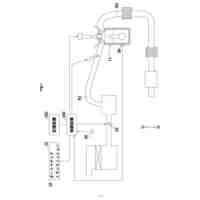
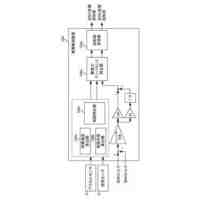
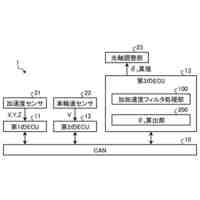
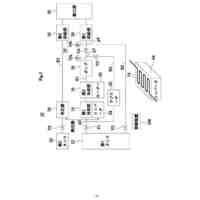
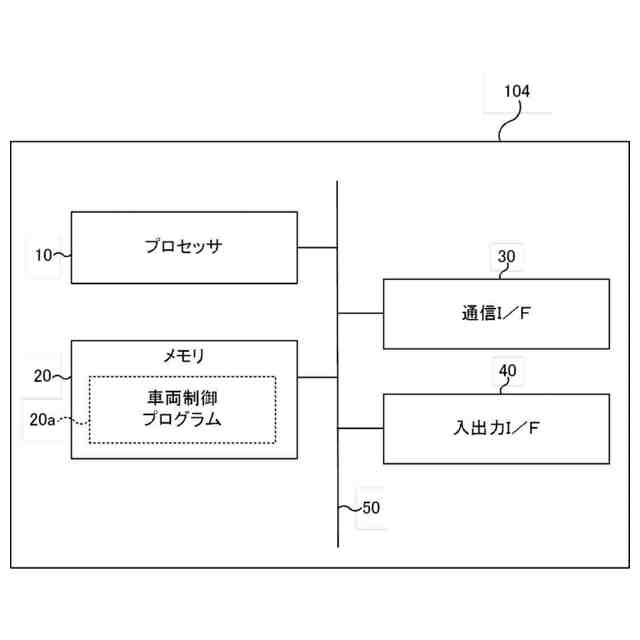
図2は本開示の実施形態にかかる車両制御装置のハードウェア構成図である。
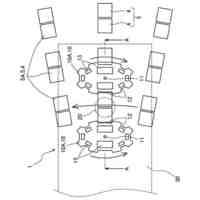
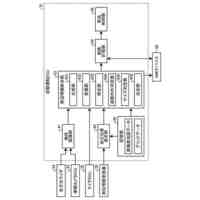
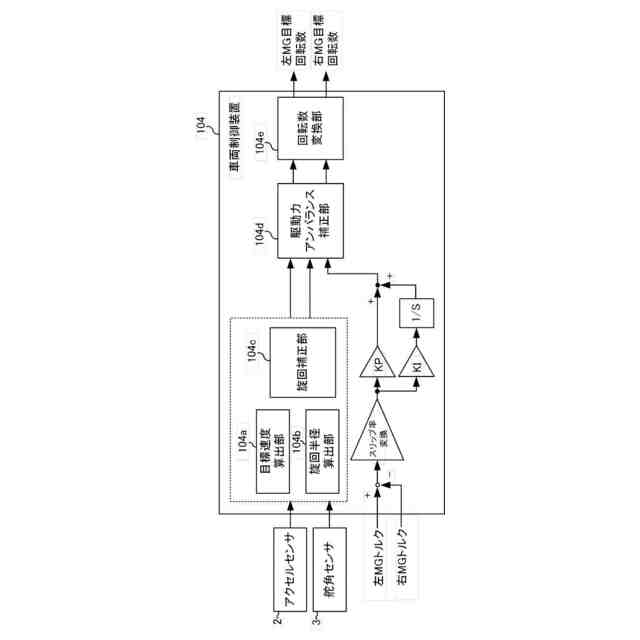
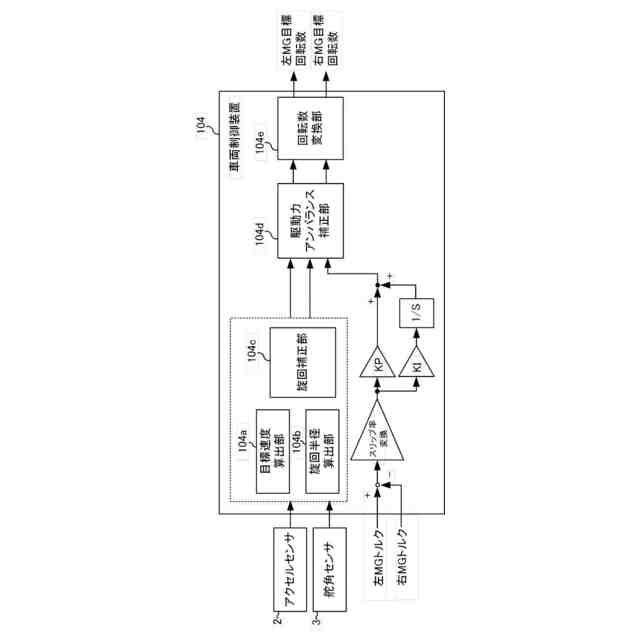
図3は車両制御装置の機能ブロック図である。
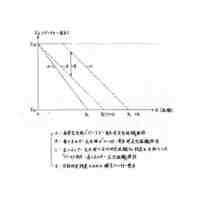
図4は目標速度の算出方法を説明するための図である。
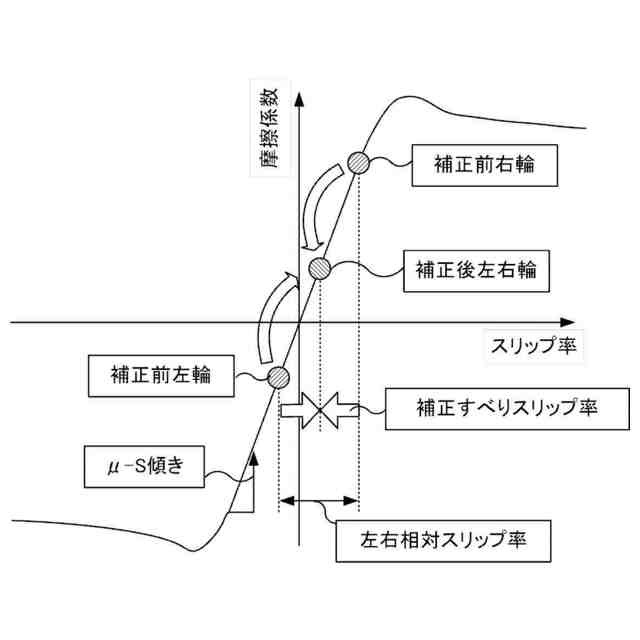
図5はタイヤ路面間μ-s特性を示す図である。
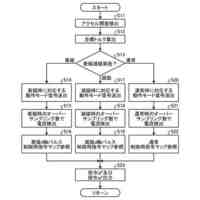
図6は本開示の実施形態にかかる車両制御装置の動作を説明するためのフローチャートである。
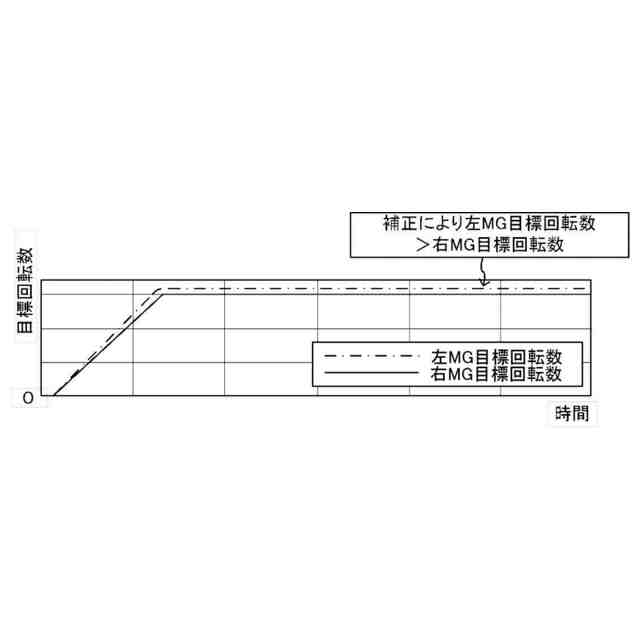
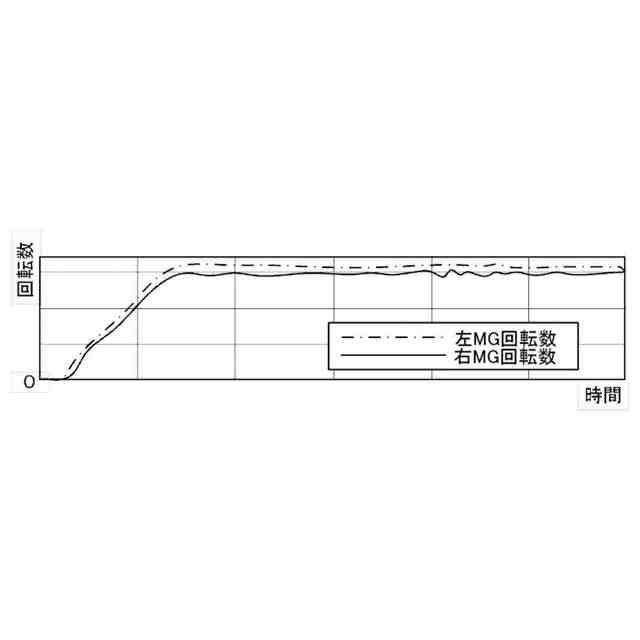
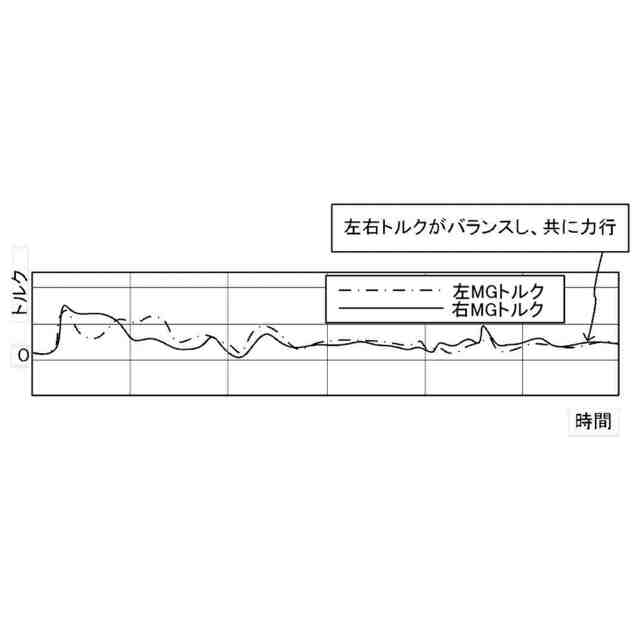
図7Aは本開示の実施形態にかかる車両制御装置の動作を説明するための図である。
図7Bは本開示の実施形態にかかる車両制御装置の動作を説明するための図である。
図7Cは本開示の実施形態にかかる車両制御装置の動作を説明するための図である。
図7Dは本開示の実施形態にかかる車両制御装置の動作を説明するための図である。
図8Aは比較例にかかる駆動トルクの制御例を説明するための図である。
図8Bは比較例にかかる駆動トルクの制御例を説明するための図である。
図8Cは比較例にかかる駆動トルクの制御例を説明するための図である。
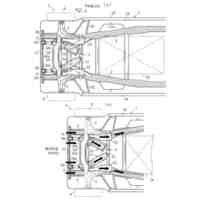
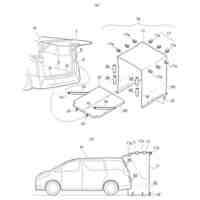
図9Aは本開示の実施形態にかかる車両制御装置を適用可能な車両の例を示す図である。
図9Bは本開示の実施形態にかかる車両制御装置を適用可能な車両の例を示す図である。
【発明を実施するための形態】
【0009】
以下、本開示の一態様について、図面を参照しつつ説明する。なお、以下の説明において用いられる図面は、何れも模式的なものであり、図面に示される、各要素の寸法の関係、各要素の比率等は、現実のものとは必ずしも一致していない。また、本開示は、以下の実施形態に何ら限定されるものではなく、本開示の範囲内において、適宜変更を加えて実施することができる。
【0010】
図1は本開示の実施形態にかかる車両制御装置を含む車両の構成図である。車両100は、走行用の電力を蓄えるバッテリ101と走行用の主電動機である複数のモータ102とを動力源とする電動車両(Battery Electric Vehicle:BEV)と解釈してよい。なお、車両100は、BEVに限定されず、バッテリ101を備えるハイブリッド自動車(Hybrid Electric Vehicle:HEV)、プラグインハイブリッド自動車(Plug-in Hybrid Electric Vehicle:PHEV)等を含み得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ダイハツ工業株式会社
車両構造
5日前
ダイハツ工業株式会社
制御装置
12日前
ダイハツ工業株式会社
車両構造
13日前
ダイハツ工業株式会社
溶接装置
18日前
ダイハツ工業株式会社
車両構造
6日前
ダイハツ工業株式会社
車両構造
5日前
ダイハツ工業株式会社
排気浄化装置
11日前
ダイハツ工業株式会社
車両制御装置
12日前
ダイハツ工業株式会社
車両制御装置
14日前
ダイハツ工業株式会社
車両制御装置
11日前
ダイハツ工業株式会社
車両用制御装置
11日前
ダイハツ工業株式会社
車両用制御装置
12日前
ダイハツ工業株式会社
絶縁紙成型装置
14日前
ダイハツ工業株式会社
充電制御システム
7日前
ダイハツ工業株式会社
燃料供給システム
5日前
ダイハツ工業株式会社
電動車両の制御装置
12日前
ダイハツ工業株式会社
ワイヤレス充電装置
14日前
ダイハツ工業株式会社
切削液の油分分離装置
6日前
ダイハツ工業株式会社
可変磁束モータの制御プログラム
7日前
ダイハツ工業株式会社
電動コンプレッサ搭載構造
10日前
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
日本精機株式会社
ケース
3か月前
個人
ホイルのボルト締結
13日前
個人
車輪清掃装置
1か月前
個人
アンチロール制御装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ