TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099475
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216158
出願日
2023-12-21
発明の名称
制御支援システム、制御支援方法、および制御支援プログラム
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークを効率良く処理するためのロボット動作のプランニングを容易にすること。
【解決手段】制御支援システムは、複数の作業領域が設定されたワークとロボットとの間の相対位置関係の候補である複数の候補位置関係のそれぞれについて、該候補位置関係に配置されたロボットのエンドエフェクタによる少なくとも一つの作業領域での所定の処理を、ワークの複数の作業領域を示すワークモデルと、エンドエフェクタを有するロボットを示すロボットモデルとに基づくシミュレーションによって仮想的に実行するシミュレーション部と、複数の候補位置関係のそれぞれについて、シミュレーションにおいて該候補位置関係の下で処理された1以上の作業領域の集合を作業領域セットとして特定する特定部と、複数の候補位置関係のそれぞれの作業領域セットに基づいて、複数の候補位置関係から相対位置関係を決定する決定部とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
ワークと、該ワークを処理するロボットとの間の相対位置関係を変更することが可能なロボットの制御を支援する制御支援システムであって、
複数の作業領域が設定された前記ワークと前記ロボットとの間の前記相対位置関係の候補である複数の候補位置関係のそれぞれについて、該候補位置関係に配置された前記ロボットのエンドエフェクタによる少なくとも一つの前記作業領域での所定の処理を、前記ワークの前記複数の作業領域を示すワークモデルと、前記エンドエフェクタを有する前記ロボットを示すロボットモデルとに基づくシミュレーションによって仮想的に実行するシミュレーション部と、
前記複数の候補位置関係のそれぞれについて、前記シミュレーションにおいて該候補位置関係の下で処理された1以上の前記作業領域の集合を作業領域セットとして特定する特定部と、
前記複数の候補位置関係のそれぞれの前記作業領域セットに基づいて、前記複数の候補位置関係から前記相対位置関係を決定する決定部と、
を備える制御支援システム。
続きを表示(約 1,600 文字)
【請求項2】
前記シミュレーション部は、前記シミュレーションに基づいて特定される前記作業領域セットを構成する前記作業領域の個数を最適化する最適化手法によって、前記候補位置関係を設定する、
請求項1に記載の制御支援システム。
【請求項3】
前記決定部は、前記複数の候補位置関係のそれぞれにおける、前記作業領域セットを構成する前記作業領域の個数に基づいて、前記相対位置関係を決定する、
請求項1または2に記載の制御支援システム。
【請求項4】
前記特定部は、前記複数の作業領域のそれぞれについて、前記シミュレーションにおいて前記エンドエフェクタによって該作業領域が処理された回数を、被処理回数として特定し、
前記決定部は、前記複数の作業領域のそれぞれの前記被処理回数に基づいて、前記相対位置関係を決定する、
請求項1または2に記載の制御支援システム。
【請求項5】
前記決定部は、
前記被処理回数が所定の基準を満たす1以上の前記作業領域によって構成される前記作業領域セットを選択し、
前記選択された作業領域セットに対応する前記候補位置関係を前記相対位置関係として決定する、
請求項4に記載の制御支援システム。
【請求項6】
1以上の前記相対位置関係では前記ロボットによって処理されない1以上の前記作業領域である1以上の残り作業領域が存在する場合に、前記シミュレーション部、前記特定部、および前記決定部に、該1以上の残り作業領域のための繰り返し処理を実行させる繰り返し制御部を更に備え、
前記シミュレーション部は前記繰り返し処理において、前記ワークに対する前記ロボットの新たな相対位置関係の候補である複数の新たな候補位置関係のそれぞれについて、前記1以上の残り作業領域のうちの少なくとも一つでの前記所定の処理を、前記シミュレーションによって仮想的に実行し、
前記特定部は前記繰り返し処理において、前記複数の新たな候補位置関係のそれぞれについて前記作業領域セットを特定し、
前記決定部は前記繰り返し処理において、前記複数の新たな候補位置関係のそれぞれの前記作業領域セットに基づいて、前記複数の新たな候補位置関係から前記新たな相対位置関係を決定する、
請求項1または2に記載の制御支援システム。
【請求項7】
前記決定された相対位置関係に対応する前記作業領域セットを、前記相対位置関係における前記ロボットによって処理される1以上の前記作業領域のグループである作業領域グループとして設定するグルーピング部と、
前記作業領域グループと前記相対位置関係との対応関係を所定の記憶部に記録する記録部と、
を更に備える請求項1または2に記載の制御支援システム。
【請求項8】
前記複数の作業領域のすべてがいずれかの前記作業領域グループに属するまで、前記シミュレーション部、前記特定部、前記決定部、および前記グルーピング部のそれぞれに、対応する処理を実行させる繰り返し制御部を更に備える、
請求項7に記載の制御支援システム。
【請求項9】
前記決定された相対位置関係を初期値として用いる最適化処理によって、該決定された相対位置関係を調整する調整部を更に備える請求項1または2に記載の制御支援システム。
【請求項10】
前記決定された相対位置関係に対応する現実の作業空間での停止位置まで移動して、該停止位置において1以上の前記作業領域で前記ワークを処理するように、該現実の作業空間に配置された前記ロボットを制御するロボット制御部を更に備える請求項1または2に記載の制御支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の一側面は制御支援システム、制御支援方法、および制御支援プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
引用文献1には、ロボットを使用して物体群から一つの物体をピックアップするためのロボットシステムが記載されている。このシステムは、物体の画像を与えるカメラと、物体のセグメント化画像を生成するディープラーニングニュートラルネットワークと、セグメント化画像を使用して物体をピックアップするための場所を識別するための手段と、セグメント化画像の中の物体の方向を使用して物体を回転するための手段とを備える。
【先行技術文献】
【特許文献】
【0003】
特開2022-181174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ワークを効率良く処理するためのロボット動作のプランニングを容易にすることが望まれている。
【課題を解決するための手段】
【0005】
本開示の一側面に係る制御支援システムは、ワークと、該ワークを処理するロボットとの間の相対位置関係を変更することが可能なロボットの制御を支援する。この制御支援システムは、複数の作業領域が設定されたワークとロボットとの間の相対位置関係の候補である複数の候補位置関係のそれぞれについて、該候補位置関係に配置されたロボットのエンドエフェクタによる少なくとも一つの作業領域での所定の処理を、ワークの複数の作業領域を示すワークモデルと、エンドエフェクタを有するロボットを示すロボットモデルとに基づくシミュレーションによって仮想的に実行するシミュレーション部と、複数の候補位置関係のそれぞれについて、シミュレーションにおいて該候補位置関係の下で処理された1以上の作業領域の集合を作業領域セットとして特定する特定部と、複数の候補位置関係のそれぞれの作業領域セットに基づいて、複数の候補位置関係から相対位置関係を決定する決定部とを備える。
【0006】
本開示の一側面に係る制御支援方法は、ワークと、該ワークを処理するロボットとの間の相対位置関係を変更することが可能なロボットの制御を支援し、少なくとも一つのプロセッサを備える制御支援システムにより実行される制御支援方法であって、複数の作業領域が設定されたワークとロボットとの間の相対位置関係の候補である複数の候補位置関係のそれぞれについて、該候補位置関係に配置されたロボットのエンドエフェクタによる少なくとも一つの作業領域での所定の処理を、ワークの複数の作業領域を示すワークモデルと、エンドエフェクタを有するロボットを示すロボットモデルとに基づくシミュレーションによって仮想的に実行するステップと、複数の候補位置関係のそれぞれについて、シミュレーションにおいて該候補位置関係の下で処理された1以上の作業領域の集合を作業領域セットとして特定するステップと、複数の候補位置関係のそれぞれの作業領域セットに基づいて、複数の候補位置関係から相対位置関係を決定するステップとを含む。
【0007】
本開示の一側面に係る制御支援プログラムは、ワークと、該ワークを処理するロボットとの間の相対位置関係を変更することが可能なロボットの制御を支援する制御支援システムとしてコンピュータを機能させるための制御支援プログラムであって、複数の作業領域が設定されたワークとロボットとの間の相対位置関係の候補である複数の候補位置関係のそれぞれについて、該候補位置関係に配置されたロボットのエンドエフェクタによる少なくとも一つの作業領域での所定の処理を、ワークの複数の作業領域を示すワークモデルと、エンドエフェクタを有するロボットを示すロボットモデルとに基づくシミュレーションによって仮想的に実行するステップと、複数の候補位置関係のそれぞれについて、シミュレーションにおいて該候補位置関係の下で処理された1以上の作業領域の集合を作業領域セットとして特定するステップと、複数の候補位置関係のそれぞれの作業領域セットに基づいて、複数の候補位置関係から相対位置関係を決定するステップとをコンピュータに実行させる。
【0008】
本開示の一側面に係る制御支援システムは、ワークと、該ワークを処理するロボットとの間の相対位置関係を変更することが可能なロボットの制御を支援する制御支援システムであって、複数の作業領域が設定されたワークとロボットとの間の相対位置関係の候補である複数の候補位置関係のそれぞれについて、該候補位置関係に配置されたロボットのエンドエフェクタによる少なくとも一つの作業領域での所定の処理を、ワークの複数の作業領域を示すワークモデルと、エンドエフェクタを有するロボットを示すロボットモデルとに基づくシミュレーションによって仮想的に実行するシミュレーション部と、複数の候補位置関係のそれぞれについて、シミュレーションにおいて該候補位置関係の下で処理された1以上の作業領域の集合を作業領域セットとして特定する特定部と、複数の作業領域セットのうちの一つを、相対位置関係におけるロボットによって処理される1以上の作業領域のグループである作業領域グループとして設定するグルーピング部とを備える。
【発明の効果】
【0009】
本開示の一側面によれば、ワークを効率良く処理するためのロボット動作のプランニングを容易にすることができる。
【図面の簡単な説明】
【0010】
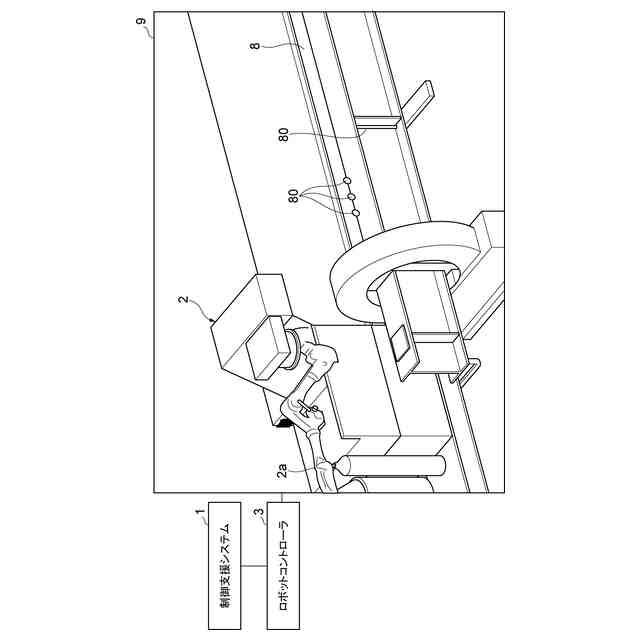
制御支援システムの適用の例を示す図である。
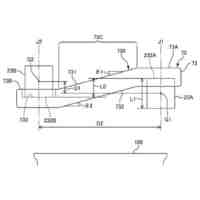
システムより決定される相対位置関係の例を示す図である。
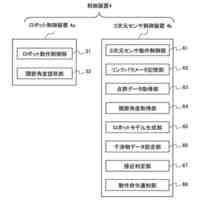
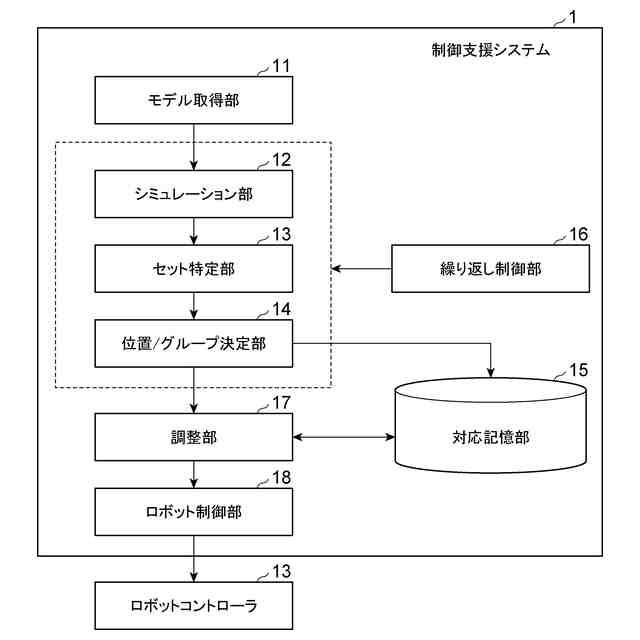
制御支援システムの機能構成の例を示す図である。
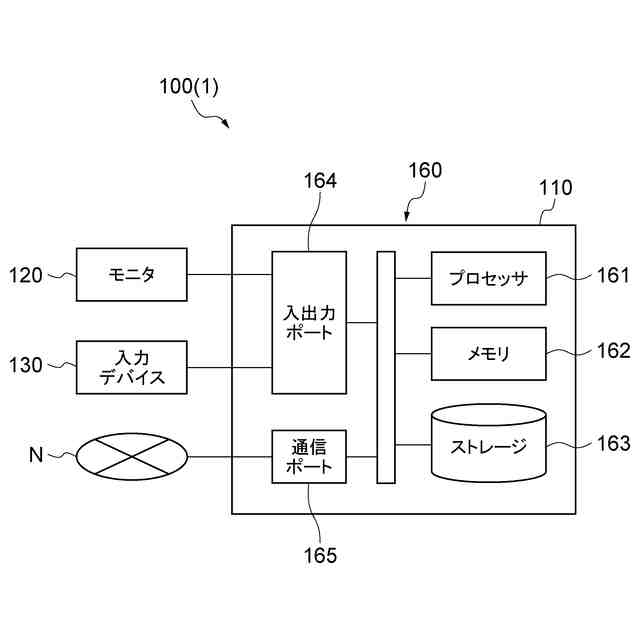
制御支援システムのために用いられるコンピュータのハードウェア構成の例を示す図である。
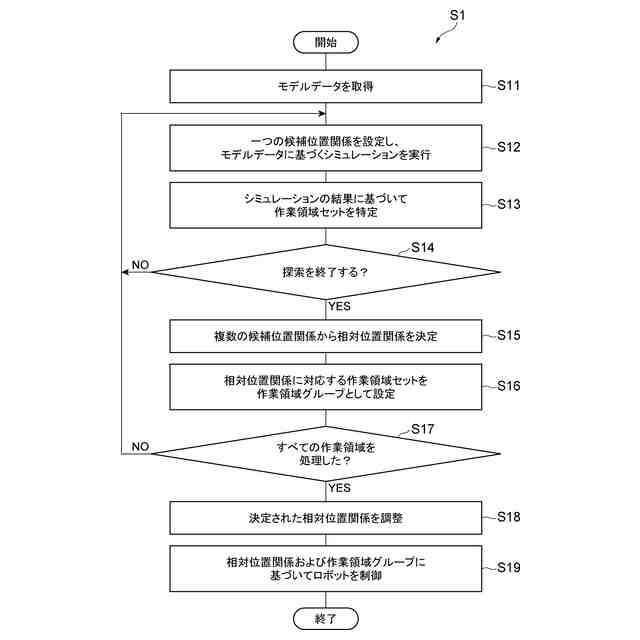
制御支援システムにより実行される処理の例を示すフローチャートである。
相対位置関係を決定する方法の例を示す図である。
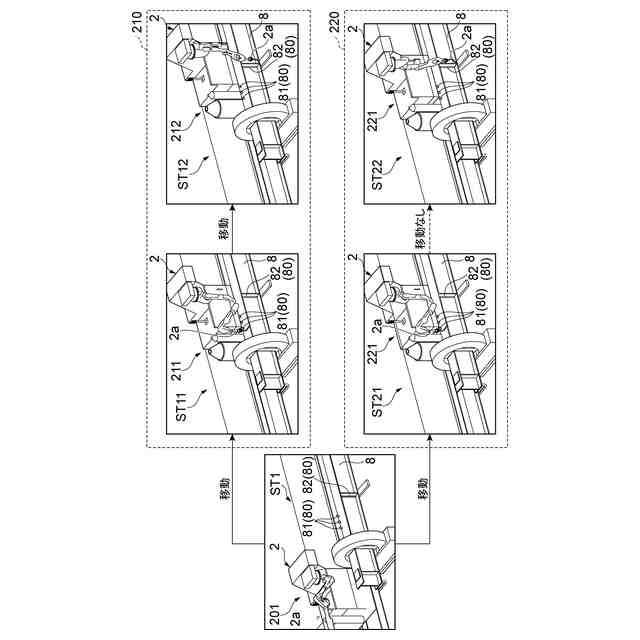
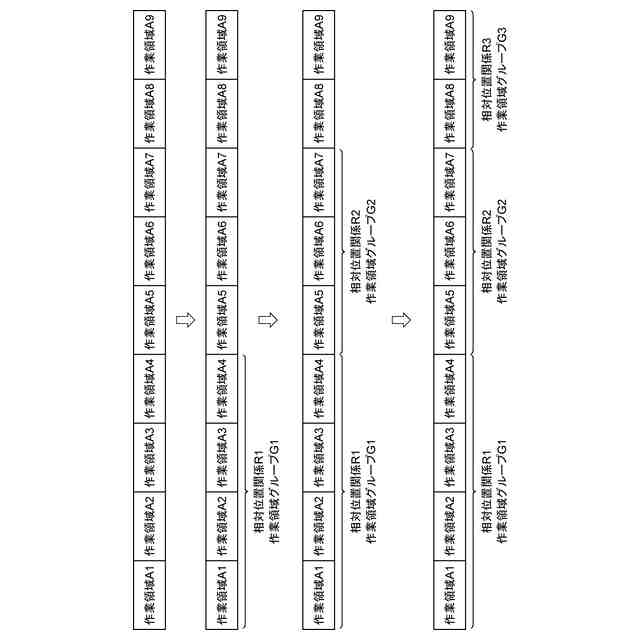
相対位置関係の決定と作業領域グループの設定とについての繰り返し処理の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社安川電機
ロボットシステム及び制御方法
27日前
株式会社安川電機
ロボットシステム、ロボット制御方法、およびロボット制御プログラム
27日前
株式会社安川電機
ロボットシステム及び制御方法
14日前
個人
固定補助具
12日前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
2か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社不二越
ロボットシステム
6日前
株式会社不二越
ロボット操作装置
今日
個人
ペグハンマおよびペグハンマ用部品
2か月前
日本精工株式会社
締結用工具
9日前
川崎重工業株式会社
ロボット
1か月前
ARMA株式会社
ジョイントフレーム
7日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
カプラ接続治具
16日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
28日前
ホシデン株式会社
分解用治具
2か月前
アピュアン株式会社
衝撃工具
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
2か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
7日前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
ロボットシステム
22日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
セイコーエプソン株式会社
ロボット
12日前
セイコーエプソン株式会社
ロボット
6日前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ