TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099481
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216165
出願日
2023-12-21
発明の名称
作業支援装置、作業機、及び作業支援方法
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250626BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業機が自動走行を行う自動走行経路から適切な方向に向けて当該作業機を適切な位置に移動させる。
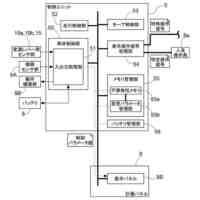
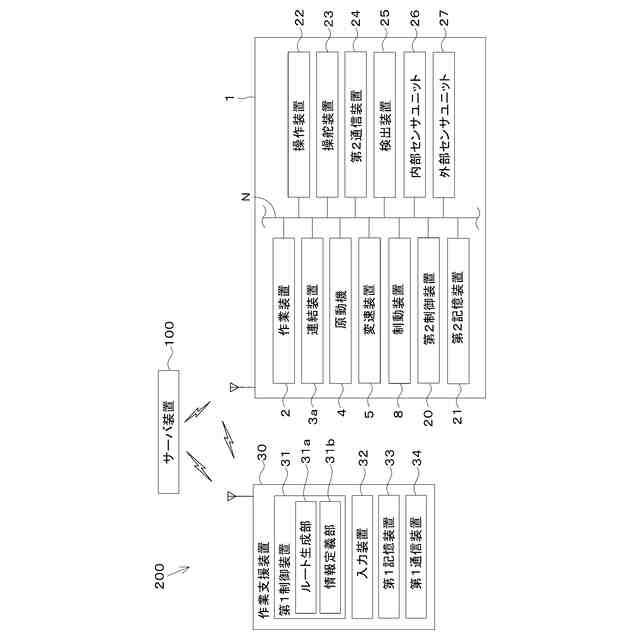
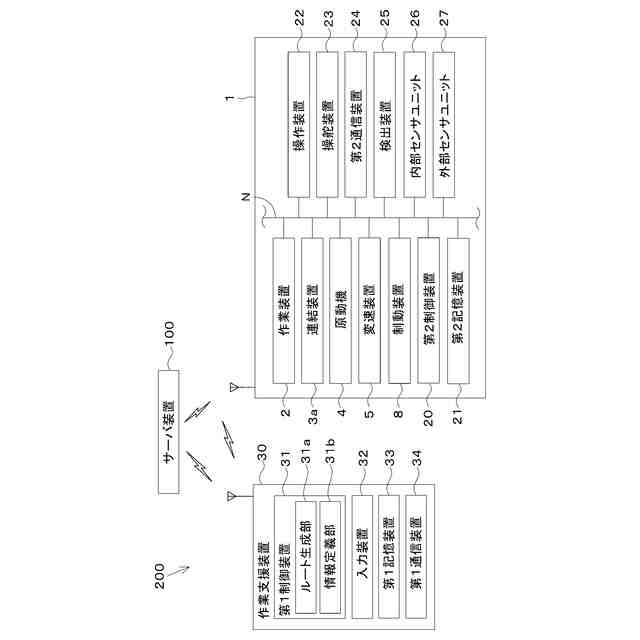
【解決手段】作業支援装置は、情報の設定の入力を受け付ける入力装置と、入力装置が入力を受け付けた情報、及び自動走行可能な作業機が作業を行う圃場の情報を取得する第1制御装置と、を備え、第1制御装置は、取得した情報に基づいて、作業機が圃場内で自動走行を行う自動走行経路から当該作業機を所定の位置に誘導するための誘導点の位置情報、及び当該誘導点における作業機の方向を指定する方位情報を含む誘導情報を定義し、当該誘導情報を作業機に出力する。
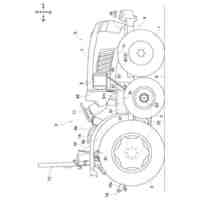
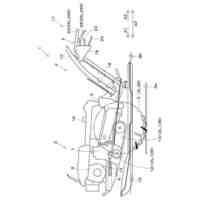
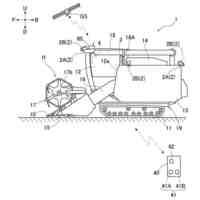
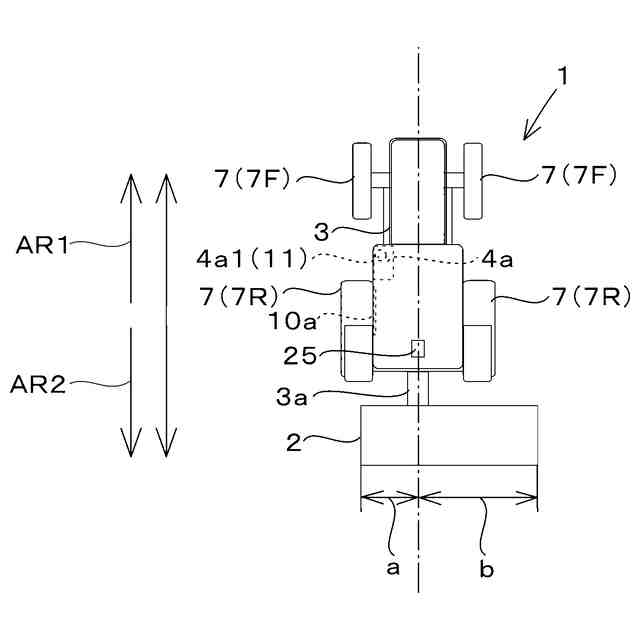
【選択図】図1
特許請求の範囲
【請求項1】
情報の設定の入力を受け付ける入力装置と、
前記入力装置が入力を受け付けた情報、及び自動走行可能な作業機が作業を行う圃場の情報を取得する第1制御装置と、
を備え、
前記第1制御装置は、取得した情報に基づいて、前記作業機が前記圃場内で前記自動走行を行う自動走行経路から当該作業機を所定の位置に誘導するための誘導点の位置情報、及び当該誘導点における前記作業機の方向を指定する方位情報を含む誘導情報を定義し、当該誘導情報を前記作業機に出力する作業支援装置。
続きを表示(約 1,100 文字)
【請求項2】
前記誘導点の位置情報は、前記自動走行経路上の地点とは異なる位置に前記作業機を誘導させる請求項1に記載の作業支援装置。
【請求項3】
前記入力装置は、前記誘導点の位置の設定の入力を受け付ける請求項2に記載の作業支援装置。
【請求項4】
前記入力装置は、前記誘導点として、前記作業機が作業を行う圃場のうち、当該圃場の内側且つ当該圃場の輪郭の近傍から任意の位置の設定の入力を受け付ける請求項3に記載の作業支援装置。
【請求項5】
前記第1制御装置は、前記圃場のうち、前記作業機の走行が禁止されている禁止領域を取得し、前記入力装置が前記誘導点の位置の設定を受け付ける際に、当該禁止領域に基づいて、前記誘導点の位置の設定の受け付けの可否を表示させる請求項3に記載の作業支援装置。
【請求項6】
前記第1制御装置は、前記圃場のうち、前記作業機の走行が禁止されている禁止領域を取得し、前記入力装置が入力を受け付けた前記誘導点が前記禁止領域に位置している場合、前記誘導点の再設定処理を行う請求項3に記載の作業支援装置。
【請求項7】
前記第1制御装置は、前記圃場のうち、前記作業機の走行が禁止されている禁止領域を取得し、前記自動走行を行う前記作業機の前記圃場における車体位置を取得し、当該車体位置と前記誘導点との間を結ぶいずれの経路も前記禁止領域を通過する場合に、前記誘導点の再設定処理を行う請求項3に記載の作業支援装置。
【請求項8】
前記第1制御装置は、前記自動走行を行う前記作業機の前記圃場における車体位置を取得し、前記作業機に異常が発生した場合、前記誘導点の再設定処理を行う請求項3に記載の作業支援装置。
【請求項9】
前記第1制御装置は、前記再設定処理を行う場合、前記入力装置に前記誘導点の設定の再入力を受け付けるよう指示し、前記入力装置が再入力を受け付けた情報に基づいて、前記再設定処理を行う請求項6~8のいずれか1項に記載の作業支援装置。
【請求項10】
前記第1制御装置は、前記再設定処理を行う場合、前記入力装置が入力を受け付けた前記誘導点に代えて、前記作業機が作業を行う圃場の内側且つ当該圃場の輪郭の近傍のうち、当該異常が発生した際の前記車体位置からの走行距離及び/又は走行時間が最も短い位置を新たな誘導点として更新し、更新後の前記誘導点に基づく前記誘導情報を再定義する請求項8に記載の作業支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクタ等の作業機の作業を支援するための作業支援装置、作業機、及び作業支援方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1に開示された作業車両は、走行車体と、圃場内に設定された自律作業経路に沿って前記走行車体を自律走行させる制御部と、前記制御部へ指示を送信する遠隔操作装置とを備え、前記制御部は、前記遠隔操作装置から走行指示を受信している間、前記自律作業経路の終了停止位置から前記圃場の端に向かって予め設定された遠隔操作走行経路に沿って、前記走行車体を遠隔走行させる。
【先行技術文献】
【特許文献】
【0003】
特開2022-11621号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業車両では、作業者が遠隔操作装置を操作することで、圃場の端まで走行車体が移動するため、作業者が停止した作業車両まで歩いて乗り込む距離を短くできる。
【0005】
しかしながら、遠隔操作走行経路は、あらかじめ制御部の記録部に記録されているものであって、作業車両の状態によっては、遠隔操作走行経路を走行した作業車両が停車した方向が圃場に対して好ましくない場合がある。
【0006】
本発明は、このような従来技術の問題点を解決すべくなされたものであって、作業機が自動走行を行う自動走行経路から適切な方向に向けて当該作業機を適切な位置に移動させることができる作業支援装置、作業機、及び作業支援方法の提供を目的とする。
【課題を解決するための手段】
【0007】
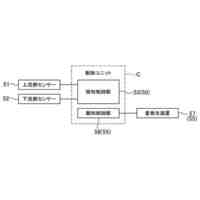
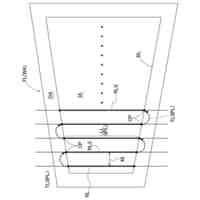
本発明の一態様に係る作業支援装置は、情報の設定の入力を受け付ける入力装置と、前記入力装置が入力を受け付けた情報、及び自動走行可能な作業機が作業を行う圃場の情報を取得する第1制御装置と、を備え、前記第1制御装置は、取得した情報に基づいて、前記作業機が前記圃場内で前記自動走行を行う自動走行経路から当該作業機を所定の位置に誘導するための誘導点の位置情報、及び当該誘導点における前記作業機の方向を指定する方位情報を含む誘導情報を定義し、当該誘導情報を前記作業機に出力する。
【0008】
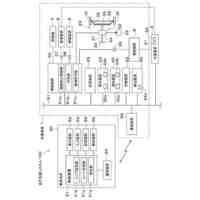
本発明の一態様に係る作業機は、上記作業支援装置と、前記自動走行を制御するための第2制御装置と、を備え、前記第1制御装置は、前記誘導情報を前記第2制御装置に出力する。
【0009】
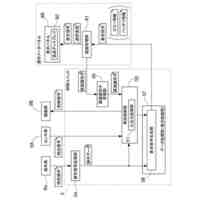
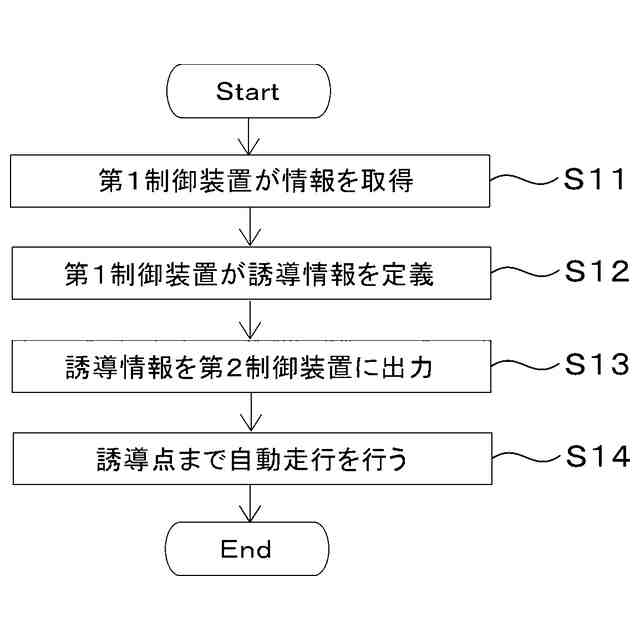
本発明の一態様に係る作業支援方法は、情報の設定の入力を受け付ける入力装置と、前記入力装置が入力を受け付けた情報、及び作業を行う圃場の情報を取得する第1制御装置と、を有する作業支援装置と、自動走行を制御するための第2制御装置と、を備える作業機の作業支援方法であって、前記第1制御装置が、情報を取得するステップと、前記第1制御装置が、当該取得した情報に基づいて、前記作業機が前記圃場内で前記自動走行を行う自動走行経路から当該作業機を所定の位置に誘導するための誘導点の位置情報、及び当該誘導点における前記作業機の方向を指定する方位情報を含む誘導情報を定義するステップと、前記第1制御装置が、前記第2制御装置に当該誘導情報を出力するステップと、を備えている。
【発明の効果】
【0010】
上記作業支援装置、作業機、及び作業支援方法によれば、自動走行を行う自動走行経路から適切な方向に向けて当該作業機を適切な位置に移動させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
移植機
9日前
株式会社クボタ
作業機
4日前
株式会社クボタ
田植機
9日前
株式会社クボタ
作業機
2日前
株式会社クボタ
収穫機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
農業機械
2日前
株式会社クボタケミックス
排水集合管
2日前
株式会社クボタケミックス
排水集合管
3日前
株式会社クボタ
歩行型作業機
2日前
株式会社クボタケミックス
電気融着継手
11日前
株式会社クボタケミックス
セグメント曲管
12日前
株式会社クボタ
浮遊物観測装置
10日前
株式会社クボタ
走行管理システム
2日前
株式会社クボタ
走行管理システム
2日前
株式会社クボタ
走行支援システム
2日前
株式会社クボタ
状態量表示システム及び作業車
9日前
株式会社クボタ
経路生成システムおよび作業機
10日前
株式会社クボタ
画面遷移制御システム及び作業車
9日前
株式会社クボタ
パラメータ管理システム及び作業車
9日前
株式会社クボタ
農業機械、及び農作業支援システム
2日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
4日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ