TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099479
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216163
出願日
2023-12-21
発明の名称
農業機械、及び農作業支援システム
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250626BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場内に物体が位置している場合でも、圃場内での農作業を適切に行う。
【解決手段】農業機械は、測位装置を有する走行可能な走行車体と、走行車体に対して作業装置を昇降可能に連結する昇降装置と、走行車体に設けられ、走行車体より前方における物体の有無及び形状、並びに物体までの距離を検出する検出装置と、を備え、検出装置の検出結果に基づいて、作業装置の少なくとも一部が物体に当たると判断される場合、走行車体及び昇降装置のうちの少なくとも一方は、作業装置の少なくとも一部が物体に当たらないような回避動作を実行し、検出装置の検出結果に基づいて、作業装置の少なくとも一部が物体に当たらないと判断される場合、走行車体は、所定の走行ルート及び測位装置で検出された走行車体の位置に基づいて自動走行を実行し、作業装置は、圃場での所定の農作業を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
測位装置を有する走行可能な走行車体と、
前記走行車体に対して作業装置を昇降可能に連結する昇降装置と、
前記走行車体に設けられ、前記走行車体より前方における物体の有無及び形状、並びに前記物体までの距離を検出する検出装置と、を備え、
前記検出装置の検出結果に基づいて、前記作業装置の少なくとも一部が前記物体に当たると判断される場合、前記走行車体及び前記昇降装置のうちの少なくとも一方は、前記作業装置の少なくとも一部が前記物体に当たらないような回避動作を実行し、
前記検出装置の検出結果に基づいて、前記作業装置の少なくとも一部が前記物体に当たらないと判断される場合、前記走行車体は、所定の走行ルート及び前記測位装置で検出された前記走行車体の位置に基づいて自動走行を実行し、前記作業装置は、圃場での所定の農作業を実行する農業機械。
続きを表示(約 1,600 文字)
【請求項2】
前記回避動作において、前記昇降装置は、前記作業装置の少なくとも一部が前記物体に当たる高さを超える回避高さまで前記作業装置を上昇させて、前記物体が位置する周辺において、前記作業装置は、前記農作業を実行しない請求項1に記載の農業機械。
【請求項3】
前記走行車体が前記物体を通過した後、前記昇降装置は、前記作業装置を下降させて、前記作業装置は、前記農作業を再開する請求項2に記載の農業機械。
【請求項4】
前記回避動作において、前記走行車体は、前記作業装置の少なくとも一部が前記物体に当たる直前の回避位置まで、前記走行ルートに沿って減速しつつ前記自動走行を実行した後、停止する請求項1に記載の農業機械。
【請求項5】
前記走行車体は、前記検出装置が取り付けられた前方取付部を有し、
前記回避位置において、前記物体は、前記前方取付部と前記作業装置との間に位置する請求項4に記載の農業機械。
【請求項6】
前記検出装置は、前記物体の硬さを検出し、
前記検出装置の前記検出結果に基づいて、前記作業装置の少なくとも一部が前記物体に当たって損傷する可能性がある場合、前記走行車体及び前記昇降装置のうちの少なくとも一方は、前記作業装置の少なくとも一部が前記物体に当たって損傷しないような前記回避動作を実行する請求項1~5のいずれかに記載の農業機械。
【請求項7】
前記農作業は、前記圃場の耕耘作業又は耕起作業であり、
前記作業装置は、前記圃場を耕耘又は耕起する爪を有し、
前記検出装置の前記検出結果に基づいて、前記作業装置の前記爪が前記物体により損傷する可能性がある場合、前記走行車体及び前記昇降装置のうちの少なくとも一方が、前記回避動作を実行する請求項6に記載の農業機械。
【請求項8】
前記回避動作は、前記昇降装置が、前記爪が前記物体に当たる高さを超える回避高さまで前記作業装置を上昇させて、前記物体が位置する周辺において前記作業装置が前記農作業を実行せず、前記走行車体が前記物体を通過した後、前記昇降装置は前記作業装置を下降させて、前記作業装置が前記耕耘作業又は前記耕起作業を再開する第1回避動作を含む請求項7に記載の農業機械。
【請求項9】
前記回避動作は、前記走行車体が、前記爪が前記物体に当たる直前の回避位置まで、前記走行ルートに沿って減速しつつ前記自動走行を実行した後、停止する第2回避動作を含み、
前記走行車体は、前記検出装置が取り付けられた前方取付部を有し、
前記回避位置において、前記物体は、前記前方取付部と前記爪との間に位置する請求項7に記載の農業機械。
【請求項10】
入出力装置を備え、
前記回避動作は、前記爪が前記物体に当たって損傷する可能性がある場合、
前記昇降装置が、前記爪が前記物体に当たる高さを超える回避高さまで前記作業装置を上昇させて、前記物体が位置する周辺において前記作業装置が前記農作業を実行せず、前記走行車体が前記物体を通過した後、前記作業装置を下降させて、前記作業装置が前記耕耘作業又は前記耕起作業を再開する第1回避動作と、
前記走行車体が、前記爪が前記物体に当たる直前の回避位置まで、前記走行ルートに沿って減速しつつ前記自動走行を実行した後、停止する第2回避動作を含み、
前記走行車体は、前記検出装置が取り付けられた前方取付部を有し、
前記回避位置において、前記物体は、前記前方取付部と前記爪との間に位置し、
前記入出力装置への入力に応じて、前記第1回避動作又は前記第2回避動作の実行を切り替える請求項7に記載の農業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、農業機械、及び農作業支援システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、予め作成された走行ルートと走行車体の車体位置に基づいて圃場を自動走行し、作業装置による農作業を行う農業機械が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-97952号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の発明のように、圃場において農業機械が走行ルートを自動走行する際に走行ルートに物体があると、作業装置の農作業を阻害する場合がある。
【0005】
本発明は、このような従来技術の問題点を解決すべくなされたものであって、圃場内に物体が位置している場合でも、圃場内での農作業を適切に行うことができる農業機械及び農業支援システムの提供を目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る農業機械は、測位装置を有する走行可能な走行車体と、前記走行車体に対して作業装置を昇降可能に連結する昇降装置と、前記走行車体に設けられ、前記走行車体より前方における物体の有無及び形状、並びに前記物体までの距離を検出する検出装置と、を備え、前記検出装置の検出結果に基づいて、前記作業装置の少なくとも一部が前記物体に当たると判断される場合、前記走行車体及び前記昇降装置のうちの少なくとも一方は、前記作業装置の少なくとも一部が前記物体に当たらないような回避動作を実行し、前記検出装置の検出結果に基づいて、前記作業装置の少なくとも一部が前記物体に当たらないと判断される場合、前記走行車体は、所定の走行ルート及び前記測位装置で検出された前記走行車体の位置に基づいて自動走行を実行し、前記作業装置は、圃場での所定の農作業を実行する。
【0007】
本発明の一態様に係る農作業支援システムは、前記農業機械と、前記農業機械と通信可能なサーバと、前記サーバと通信可能なユーザ端末と、を備えている。
【発明の効果】
【0008】
本発明によれば、圃場内に物体が位置している場合でも、圃場内での農作業を適切に行うことができる。
【図面の簡単な説明】
【0009】
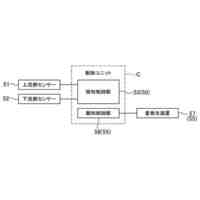
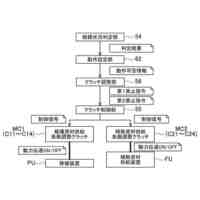
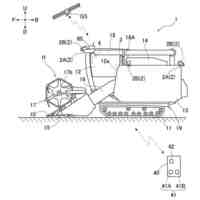
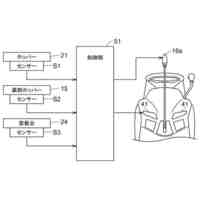
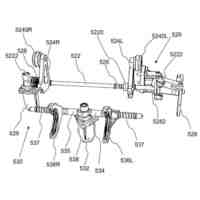
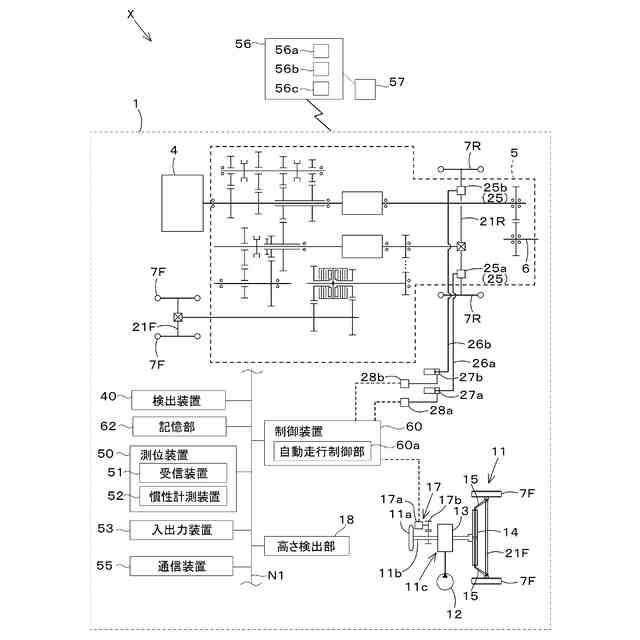
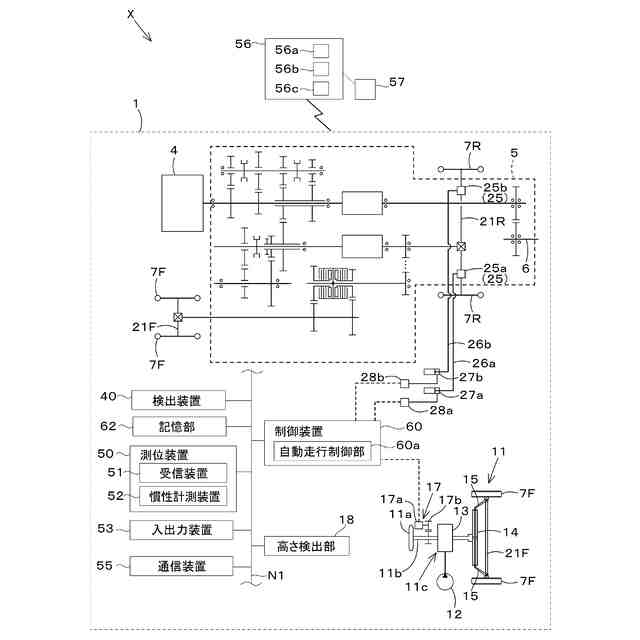
農業機械のブロック図、制動装置等を示す図である。
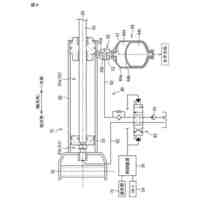
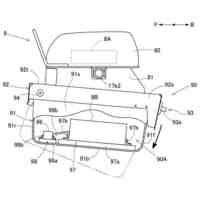
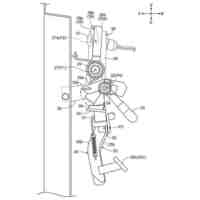
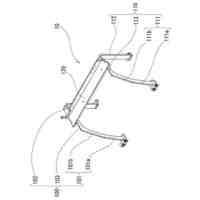
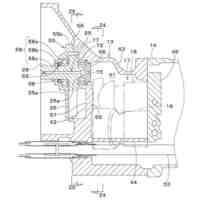
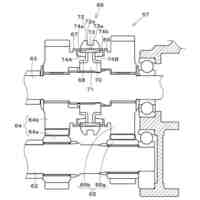
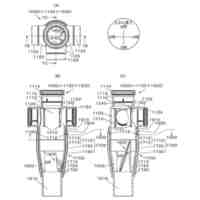
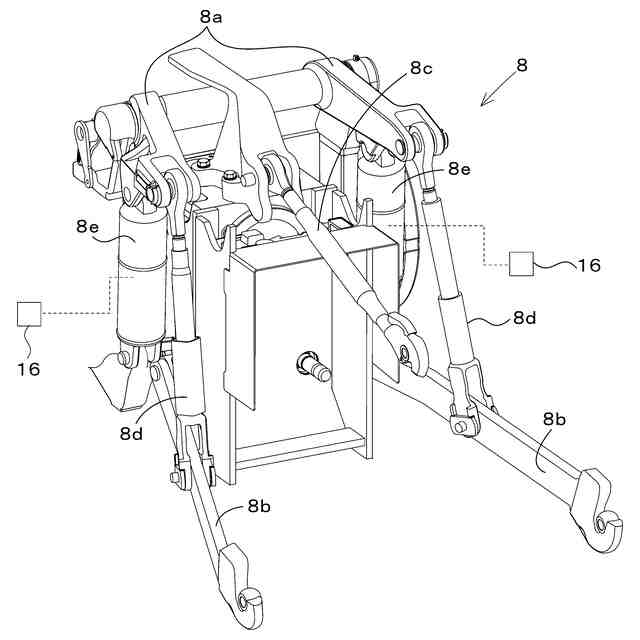
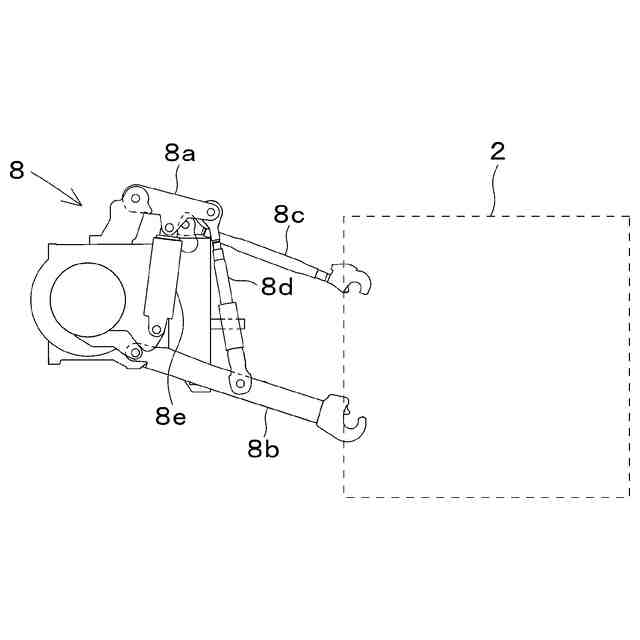
昇降装置を示す斜視図である。
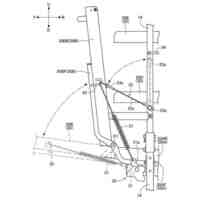
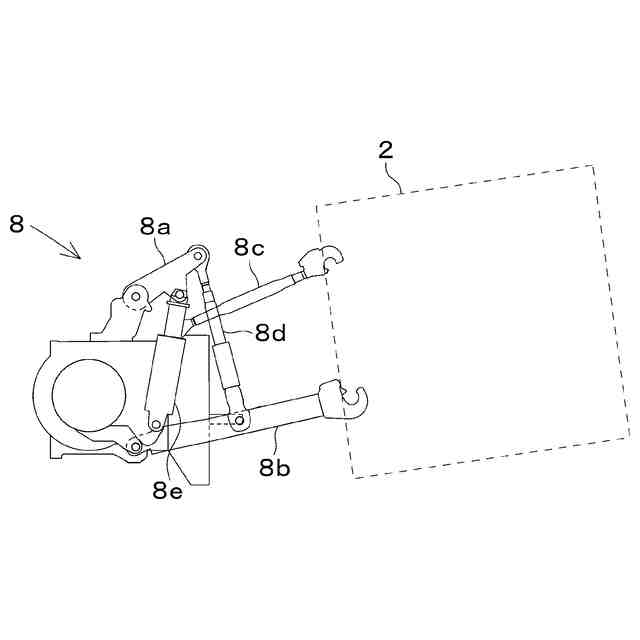
昇降装置の動作を示す一例である。
昇降装置の動作を示す他例である。
昇降装置の動作を示す他例である。
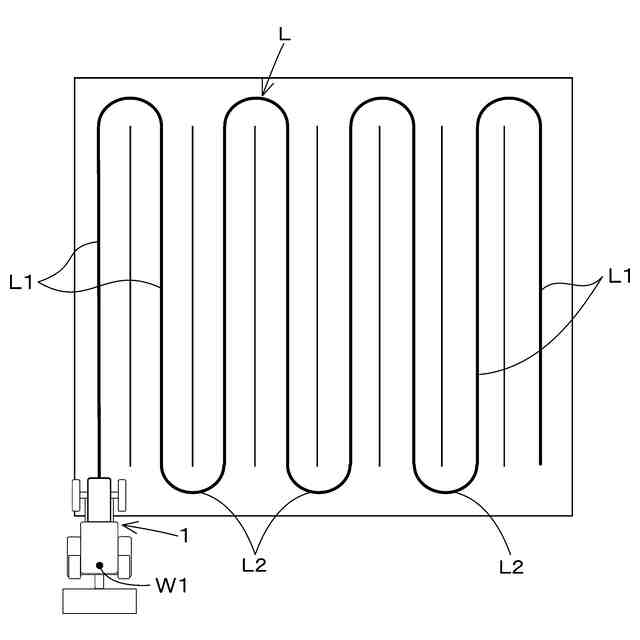
走行ルートの一例を示す図である。
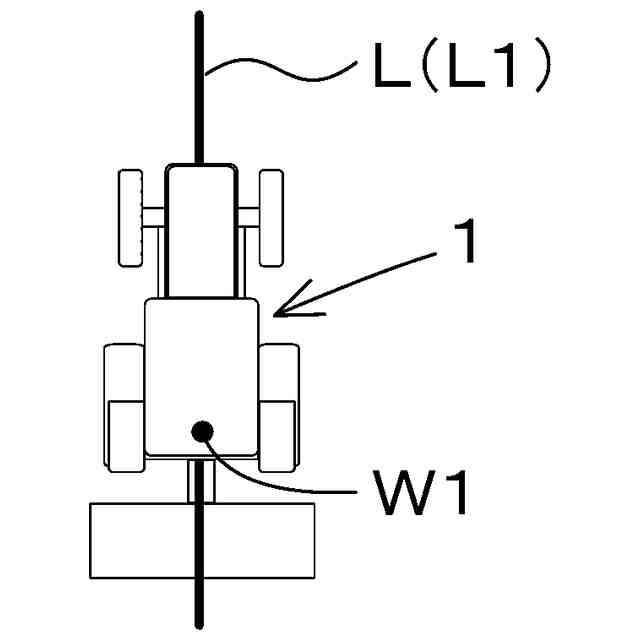
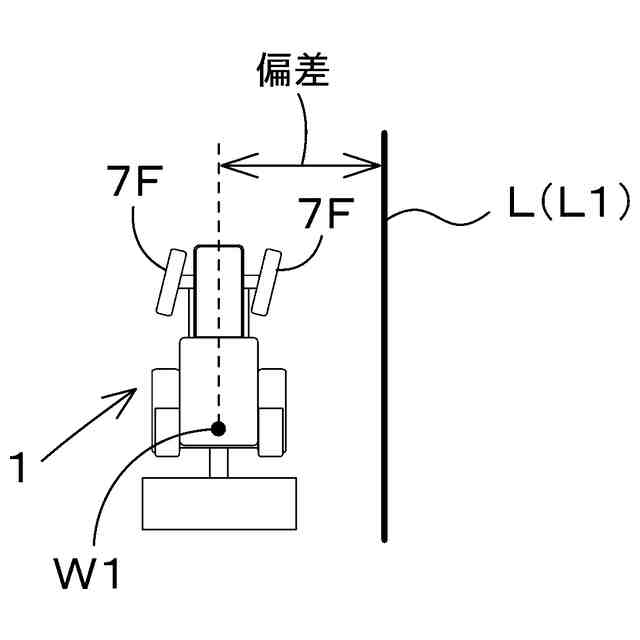
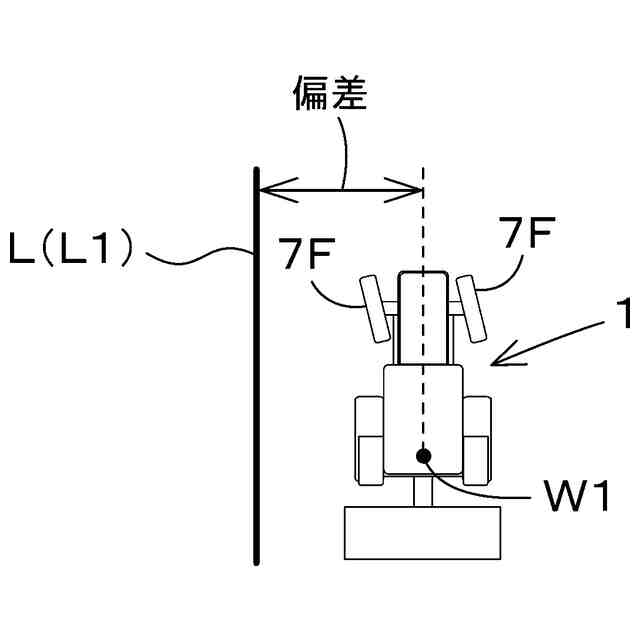
自動走行を説明する図である。
自動走行を説明する図である。
自動走行を説明する図である。
自動走行を説明する図である。
第1回避動作を説明する図である。
第1回避動作における作業装置の最下点の高さの変動を説明する図である。
第1回避動作における物体が位置する周辺を説明する図である。
第1回避動作のフローチャートである。
第2回避動作を説明する図である。
第2回避動作における走行車体の走行速度の変動を説明する図である。
第2回避動作における作業領域を説明する図である。
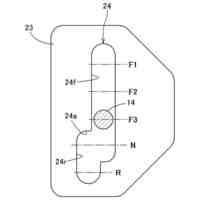
入出力装置が表示する操作画面の一例である。
入出力装置が表示する回避動作の選択が可能な操作画面の一例である。
入出力装置が表示するマップの一例である。
第2回避動作のフローチャートである。
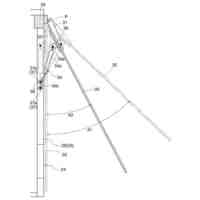
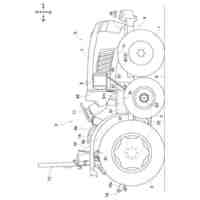
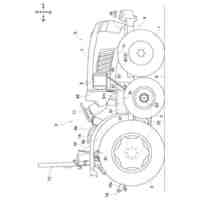
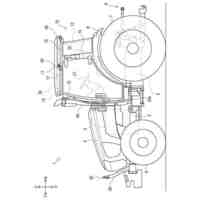
農業機械の側面全体図である。
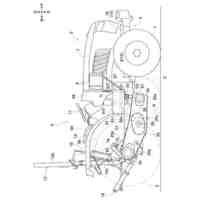
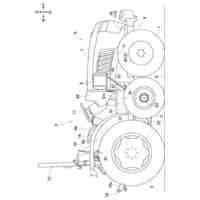
作業装置として耕耘装置を連結した農業機械の側面全体図である。
作業装置として耕起装置を連結した農業機械の側面全体図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態について、図面を参照しながら説明する。農作業支援システムXは、農業機械1と、農業機械1と通信可能なサーバ56と、サーバ56と通信可能なユーザ端末57と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
9日前
株式会社クボタ
田植機
1か月前
株式会社クボタ
田植機
9日前
株式会社クボタ
移植機
9日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
23日前
株式会社クボタ
収穫機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
農業機械
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
圃場作業車
25日前
株式会社クボタケミックス
排水集合管
3日前
株式会社クボタ
多目的車両
18日前
株式会社クボタケミックス
排水集合管
2日前
株式会社クボタ
作物収穫機
1か月前
株式会社クボタケミックス
電気融着継手
11日前
株式会社クボタ
電動作業車両
18日前
株式会社クボタ
電動作業車両
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ