TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100238
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023217457
出願日
2023-12-22
発明の名称
走行管理システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250626BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場の状態にマッチする適切な未作業領域を算出できる走行管理システムを提供する。
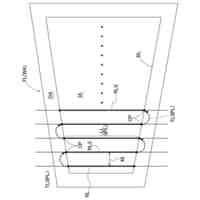
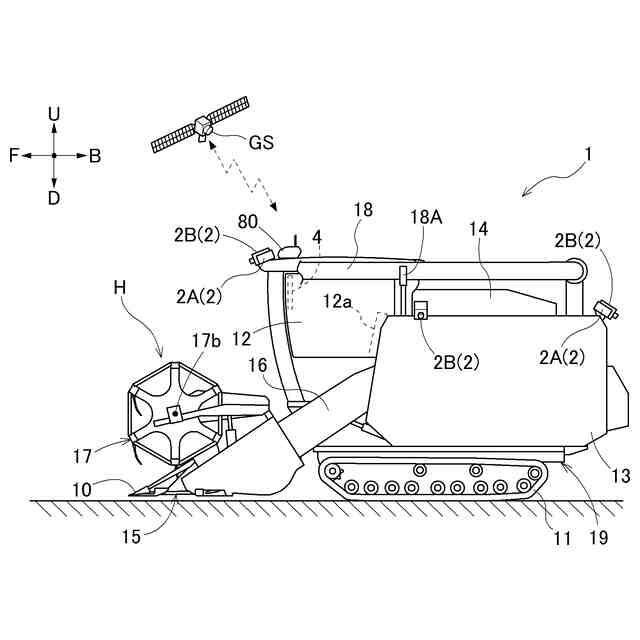
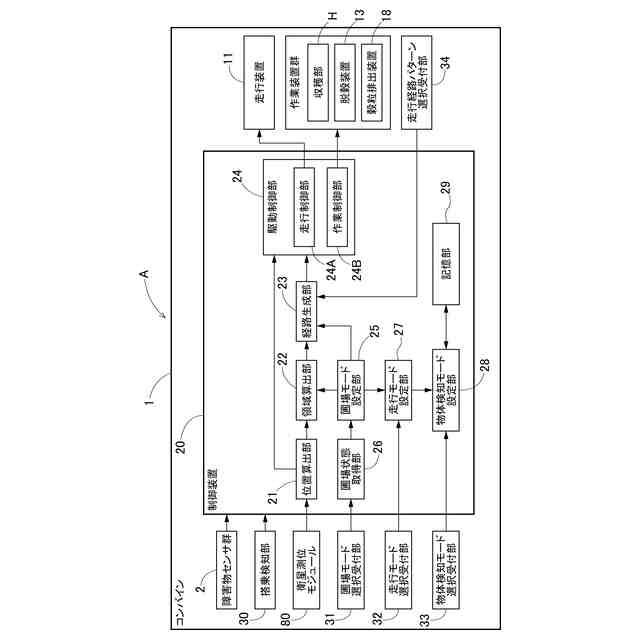
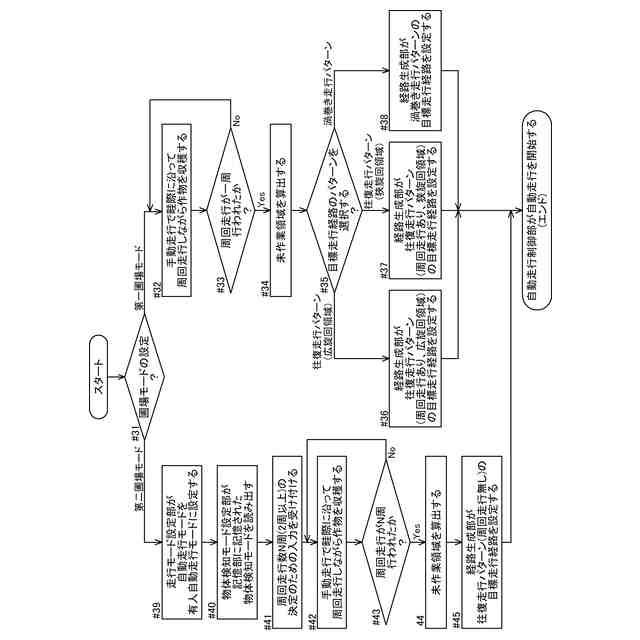
【解決手段】圃場を走行しながら作物を収穫する収穫機のための走行管理システム。圃場モードを選択的に設定する圃場モード設定部と、人為操作を伴う走行で作物を収穫しながら圃場の外周領域を収穫機が周回する周回走行の走行軌跡に基づいて未作業領域を算出する未作業領域算出部と、が備えられている。未作業領域算出部は、圃場モードが第一圃場モードに設定されている場合には、周回走行が一周以上行われたことに応じて、周回走行の走行軌跡に基づいて未作業領域を算出し、圃場モードが第二圃場モードに設定されている場合には、周回走行がN周以上行われたことに応じて、周回走行の走行軌跡に基づいて未作業領域を算出するように構成されている。
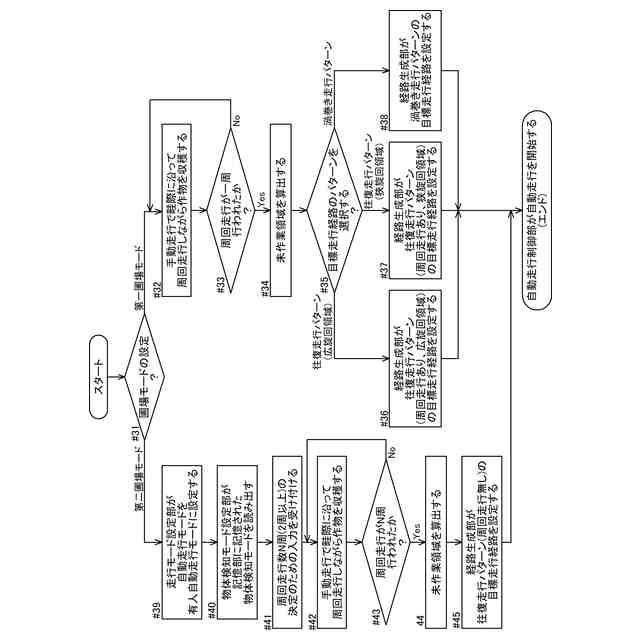
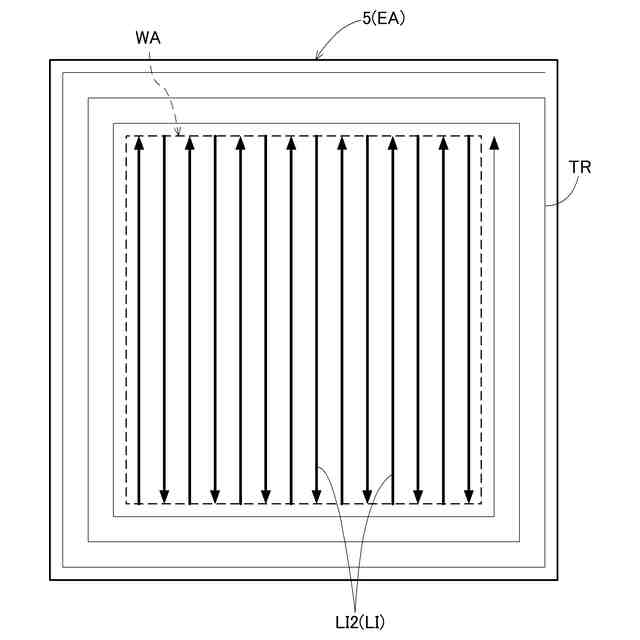
【選択図】図5
特許請求の範囲
【請求項1】
圃場を走行しながら作物を収穫する収穫機のための走行管理システムであって、
第一圃場モード及び第二圃場モードを含む圃場モードを選択的に設定する圃場モード設定部と、
人為操作を伴う走行で前記作物を収穫しながら前記圃場の外周領域を前記収穫機が周回する周回走行の走行軌跡に基づいて未作業領域を算出する未作業領域算出部と、が備えられ、
前記未作業領域算出部は、
前記圃場モードが前記第一圃場モードに設定されている場合には、前記周回走行が一周以上行われたことに応じて、前記周回走行の前記走行軌跡に基づいて前記未作業領域を算出し、
前記圃場モードが前記第二圃場モードに設定されている場合には、前記周回走行がN周以上行われたことに応じて(Nは予め定められた2以上の数)、前記周回走行の前記走行軌跡に基づいて前記未作業領域を算出するように構成されている走行管理システム。
続きを表示(約 1,700 文字)
【請求項2】
前記圃場モードを前記第一圃場モードと前記第二圃場モードとの何れか一方に設定するための人為的な選択操作を受け付ける圃場モード選択受付部が備えられている請求項1に記載の走行管理システム。
【請求項3】
前記圃場の状態を取得する圃場状態取得部が備えられ、
前記圃場モード設定部は、前記圃場状態取得部の取得結果に応じて、前記圃場モードを前記第一圃場モードと前記第二圃場モードとに選択的に設定するように構成されている請求項1に記載の走行管理システム。
【請求項4】
自動走行で前記未作業領域の前記作物を収穫する作業走行を前記収穫機に行わせるための目標走行経路を生成する走行経路生成部が備えられ、
前記走行経路生成部は、前記圃場モードが前記第一圃場モードに設定されている場合に前記未作業領域の外周縁に沿って周回する前記作業走行を許容する前記目標走行経路を生成し、前記圃場モードが前記第二圃場モードに設定されている場合に前記未作業領域の外周縁に沿って周回する前記作業走行を許容しない前記目標走行経路を生成するように構成されている請求項1から3の何れか一項に記載の走行管理システム。
【請求項5】
前記未作業領域の前記作物を収穫するために前記収穫機の自動走行を制御する自動走行制御部と、
前記収穫機の搭乗部に搭乗する搭乗者を検知する搭乗検知部と、
前記搭乗部に前記搭乗者が検知されない状態で前記自動走行制御部による前記自動走行を許容する無人自動走行モードと、前記搭乗部に前記搭乗者が検知されない状態で前記自動走行制御部による前記自動走行を許容しない有人自動走行モードと、を含む自動走行モードを選択的に設定する走行モード設定部と、が備えられ、
前記走行モード設定部は、前記圃場モードが前記第二圃場モードに設定されたことに応じて、前記自動走行モードが前記無人自動走行モードであれば前記自動走行モードを前記有人自動走行モードに設定するように構成されている請求項1から3の何れか一項に記載の走行管理システム。
【請求項6】
前記収穫機の周囲における物体の有無を検知する物体検知部と、
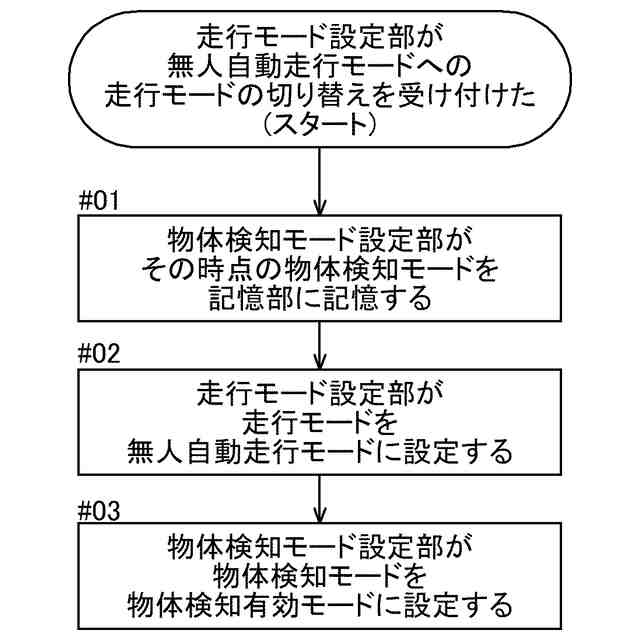
前記物体検知部による前記物体の検知に応じて前記自動走行制御部による前記自動走行を中断させる物体検知有効モードと、前記物体検知部による前記物体の検知に関わらず前記自動走行制御部による前記自動走行を許容する物体検知無効モードと、を含む物体検知モードを選択的に設定する物体検知モード設定部と、
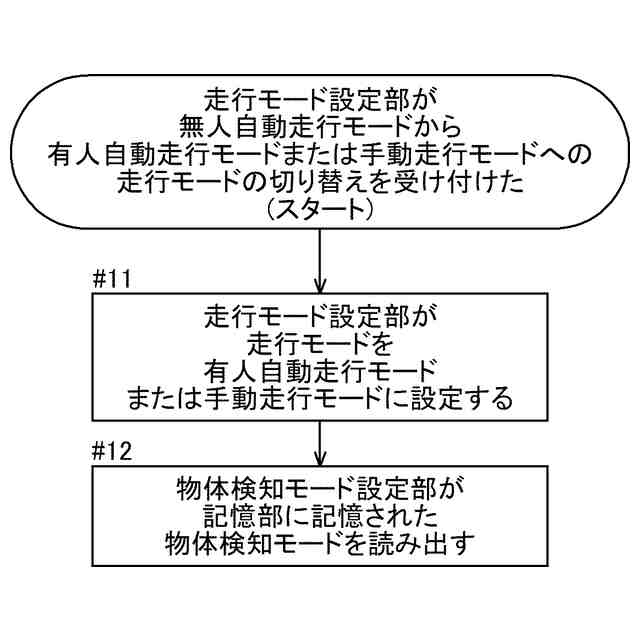
前記走行モード設定部が前記有人自動走行モード以外の前記自動走行モードに切り替えられたことに応じて、前記走行モード設定部が前記有人自動走行モード以外の前記自動走行モードに切り替えられる前の前記物体検知モードを記憶する物体検知モード記憶部と、が備えられ、
前記物体検知モード設定部は、前記自動走行モードが前記有人自動走行モードに再び設定されたことに応じて、前記物体検知モードを前記物体検知モード記憶部に記憶された前記物体検知モードに設定するように構成されている請求項5に記載の走行管理システム。
【請求項7】
前記未作業領域の前記作物を収穫するために前記収穫機の自動走行を制御する自動走行制御部と、
前記収穫機の搭乗部に搭乗する搭乗者を検知する搭乗検知部と、
前記搭乗部に前記搭乗者が検知されない状態で前記自動走行制御部による前記自動走行を許容する無人自動走行モードと、前記搭乗部に前記搭乗者が検知されない状態で前記自動走行制御部による前記自動走行を許容しない有人自動走行モードと、を含む自動走行モードを選択的に設定する走行モード設定部と、が備えられ、
前記走行モード設定部は、前記圃場モードが前記第一圃場モードに設定されている場合に前記自動走行モードを前記無人自動走行モードに設定可能に構成され、前記圃場モードが前記第二圃場モードに設定されている場合に前記自動走行モードを前記無人自動走行モードに設定不能に構成されている請求項1から3の何れか一項に記載の走行管理システム。
発明の詳細な説明
【技術分野】
【0001】
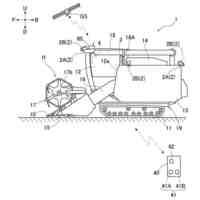
本発明は、圃場を走行しながら作物を収穫する収穫機のための走行管理システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば特許文献1に開示された走行管理システム(文献では「経路生成システム」)では、人為操作を伴う走行で作物を収穫しながら圃場の外周領域を収穫機が周回する周回走行の走行軌跡に基づいて未作業領域(文献では「作業対象領域」)が算出される。
【先行技術文献】
【特許文献】
【0003】
特開2022-163534号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで算出された未作業領域は、収穫機が圃場を自動走行しながら作物を収穫するために用いられる。しかし、圃場の状態次第では、算出された未作業領域が自動走行に適したものとならず、必ずしも収穫機が作物を適切に収穫できない虞がある。
【0005】
本発明の目的は、圃場の状態にマッチした適切な未作業領域を算出できる走行管理システムを提供することにある。
【課題を解決するための手段】
【0006】
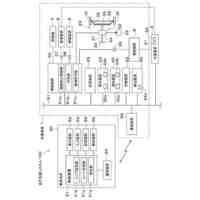
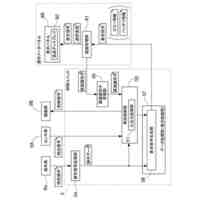
本発明は、圃場を走行しながら作物を収穫する収穫機のための走行管理システムであって、第一圃場モード及び第二圃場モードを含む圃場モードを選択的に設定する圃場モード設定部と、人為操作を伴う走行で前記作物を収穫しながら前記圃場の外周領域を前記収穫機が周回する周回走行の走行軌跡に基づいて未作業領域を算出する未作業領域算出部と、が備えられ、前記未作業領域算出部は、前記圃場モードが前記第一圃場モードに設定されている場合には、前記周回走行が一周以上行われたことに応じて、前記周回走行の前記走行軌跡に基づいて前記未作業領域を算出し、前記圃場モードが前記第二圃場モードに設定されている場合には、前記周回走行がN周以上行われたことに応じて(Nは予め定められた2以上の数)、前記周回走行の前記走行軌跡に基づいて前記未作業領域を算出するように構成されていることを特徴とする。
【0007】
本発明によると、未作業領域算出部は、設定された圃場モードに応じて異なる周回数の周回走行の走行軌跡に基づいて未作業領域を算出するように構成されている。例えば、畝のない圃場の場合は一周以上の周回走行が行われれば、その後の自動走行は適切に実行可能である。しかし畝のある圃場の場合は、自動走行は畝に沿った欧風走行が好ましいため、少なくとも2回以上の周回走行が行われると好ましい。周回走行の周回数を異ならせることによって、未作業領域を圃場の状態にマッチさせることが可能となる。これにより、圃場の状態にマッチした適切な未作業領域を算出できる走行管理システムが実現される。
【0008】
本発明において、前記圃場モードを前記第一圃場モードと前記第二圃場モードとの何れか一方に設定するための人為的な選択操作を受け付ける圃場モード選択受付部が備えられていると好適である。
【0009】
本構成であれば、オペレータ等が圃場の状態(畝の有無、作物の種別など)を確認したうえで、適切な圃場モードを選択できる。
【0010】
本発明において、前記圃場の状態を取得する圃場状態取得部が備えられ、前記圃場モード設定部は、前記圃場状態取得部の取得結果に応じて、前記圃場モードを前記第一圃場モードと前記第二圃場モードとに選択的に設定するように構成されていると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
今日
株式会社クボタ
作業機
今日
株式会社クボタ
作業機
今日
株式会社クボタ
田植機
7日前
株式会社クボタ
作業機
今日
株式会社クボタ
収穫機
今日
株式会社クボタ
作業車
7日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
農業機械
今日
株式会社クボタケミックス
排水集合管
1日前
株式会社クボタケミックス
排水集合管
今日
株式会社クボタ
歩行型作業機
今日
株式会社クボタケミックス
電気融着継手
9日前
株式会社クボタ
嫌気性処理方法
14日前
株式会社クボタケミックス
セグメント曲管
10日前
株式会社クボタ
浮遊物観測装置
8日前
株式会社クボタ
走行管理システム
今日
株式会社クボタ
走行支援システム
今日
株式会社クボタ
走行管理システム
今日
株式会社クボタ
経路生成システムおよび作業機
8日前
株式会社クボタ
状態量表示システム及び作業車
7日前
株式会社クボタ
画面遷移制御システム及び作業車
7日前
株式会社クボタ
パラメータ管理システム及び作業車
7日前
株式会社クボタ
農業機械、及び農作業支援システム
今日
株式会社クボタ
作業機、プログラム、及びその記録媒体
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ