TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099533
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216247
出願日
2023-12-21
発明の名称
作業機械の制御装置
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250626BHJP(水工;基礎;土砂の移送)
要約
【課題】操作者が作業機械の外部に配置された合図者によるジェスチャーに従って作業機械を操作しようとする場合の危険性を低減する。
【解決手段】動作要素を備えた作業機械の制御装置であって、作業機械を動作させるために操作が行われる操作手段と、前記作業機械の外部の合図者によるジェスチャーを認識する認識部と、前記認識部で認識したジェスチャーに対応する操作が前記操作手段に対して行われていない場合に、前記操作手段を操作する操作者への報知と、前記作業機械の動作制限との少なくとも一方を行う制御部とを有する。
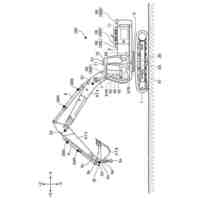
【選択図】図4
特許請求の範囲
【請求項1】
動作要素を備えた作業機械の制御装置であって、
前記作業機械を動作させるために操作が行われる操作手段と、
前記作業機械の外部の合図者によるジェスチャーを認識する認識部と、
前記認識部で認識したジェスチャーに対応する操作が前記操作手段に対して行われていない場合に、前記操作手段を操作する操作者への報知と、前記作業機械の動作制限との少なくとも一方を行う制御部と、を有する、作業機械の制御装置。
続きを表示(約 880 文字)
【請求項2】
前記合図者によるジェスチャーに対応する操作の内容を、当該ジェスチャーに対応づけて記憶した記憶部を有し、
前記制御部は、前記認識部で認識したジェスチャーに対応づけて前記記憶部に記憶された操作が前記操作手段に対して行われているかどうかを判断する、請求項1に記載の作業機械の制御装置。
【請求項3】
前記制御部は、前記制御装置に対して所定の操作が行われた場合、前記認識部で所定のジェスチャーを認識した場合、前記認識部で認識したジェスチャーに対応する操作が前記操作手段に対して行われた場合のいずれかで、前記報知または前記動作制限を解除する、請求項1に記載の作業機械の制御装置。
【請求項4】
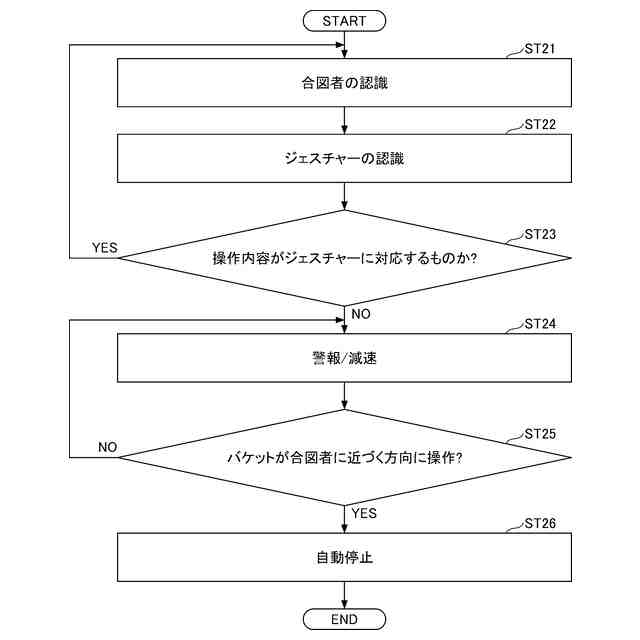
前記制御部は、前記認識部で認識したジェスチャーに対応する操作が前記操作手段に対して行われていない場合であって、前記動作要素が前記合図者に近づく操作が前記操作手段に対して行われている場合、前記作業機械の動作を停止させる、請求項1に記載の作業機械の制御装置。
【請求項5】
前記認識部が、前記合図者の位置を認識する、請求項4に記載の作業機械の制御装置。
【請求項6】
前記制御部は、前記合図者と前記動作要素との距離が所定距離以下となった場合に、前記作業機械の動作を停止させる、請求項4に記載の作業機械の制御装置。
【請求項7】
前記所定距離は、前記動作要素に取り付けられた荷物について取得された荷物情報によって定まる、請求項6に記載の作業機械の制御装置。
【請求項8】
前記制御部は、前記認識部で認識したジェスチャーに対応する操作が前記操作手段に対して行われていない場合、前記操作者への報知を行うとともに、前記操作手段に対する操作に応じた前記作業機械の動作の速度を制限する、請求項1に記載の作業機械の制御装置。
【請求項9】
前記動作要素は、作業機械本体に移動可能に取り付けられる作業アタッチメントを含む、請求項1に記載の作業機械の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
作業機械の作業現場において、作業機械の動作にジェスチャーを用いることが知られている。特許文献1は、作業者のジェスチャーに応じてショベルが動作する技術を開示している。一方、実際の作業現場においては、作業機械の外部に配置された合図者が、作業機械の動作を指示するためのジェスチャーを行い、作業機械の操作者が、合図者によるジェスチャーを確認しながら作業を行う場合が多い。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/032267号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、作業機械の操作者が、合図者によるジェスチャーに対応する操作とは異なる操作を行った場合、作業機械が合図者や障害物に衝突する等の危険が発生する虞がある。
【0005】
そこで、操作者が作業機械の外部に配置された合図者によるジェスチャーに従って作業機械を操作しようとする場合の危険性を低減することができる作業機械の制御装置を提供することが望ましい。
【課題を解決するための手段】
【0006】
上記目的を達成するために本開示は、
動作要素を備えた作業機械の制御装置であって、
前記作業機械を動作させるために操作が行われる操作手段と、
前記作業機械の外部の合図者によるジェスチャーを認識する認識部と、
前記認識部で認識したジェスチャーに対応する操作が前記操作手段に対して行われていない場合に、前記操作手段を操作する操作者への報知と、前記作業機械の動作制限との少なくとも一方を行う制御部とを有する。
【発明の効果】
【0007】
本開示によれば、作業機械の外部に配置された合図者によるジェスチャーに従って作業機械が操作される場合の危険性を低減することができる。
【図面の簡単な説明】
【0008】
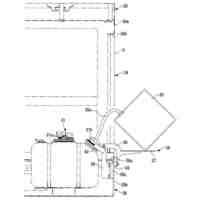
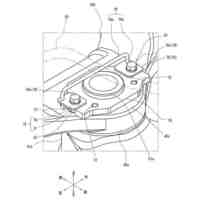
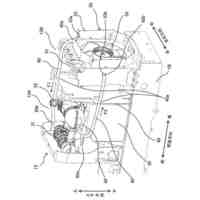
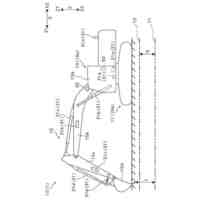
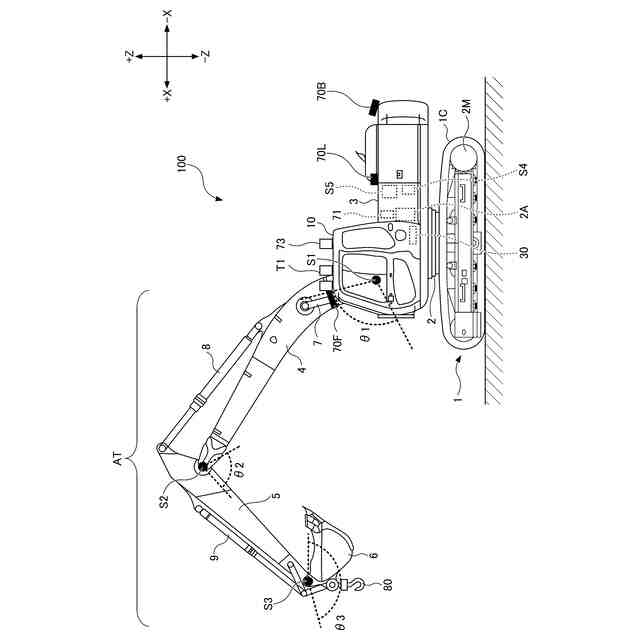
本実施形態に係るショベルの側面図である。
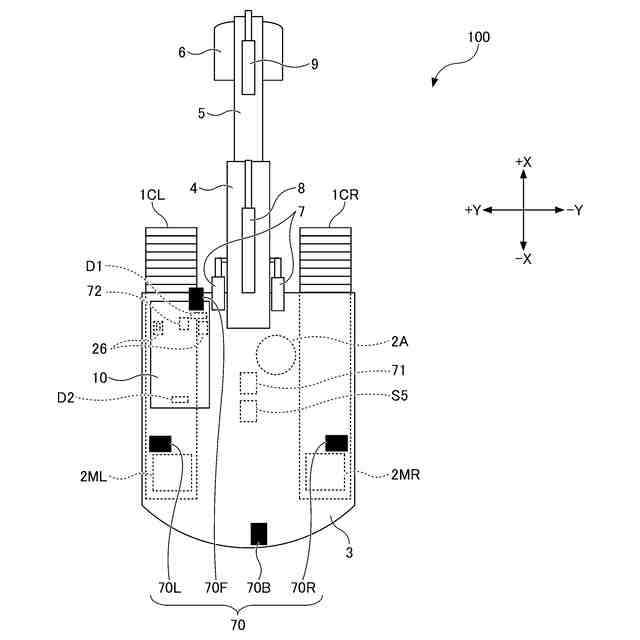
本実施形態に係るショベルの上面図である。
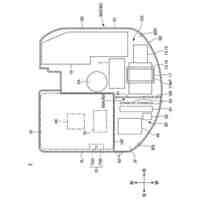
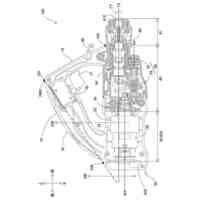
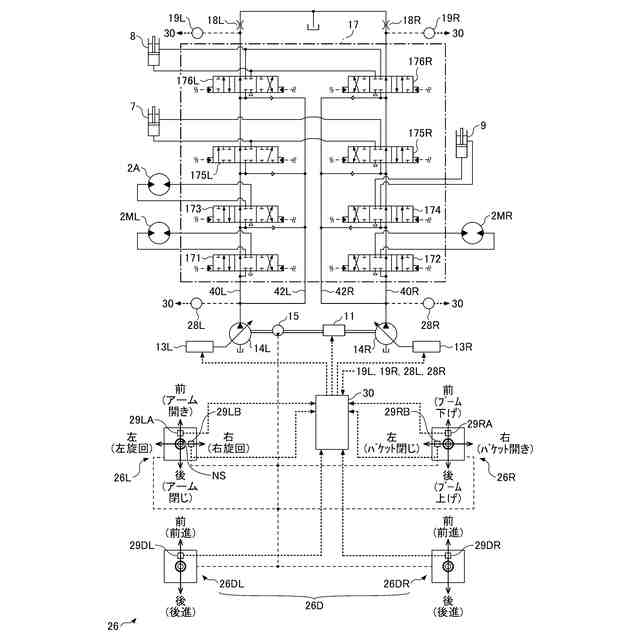
ショベルの油圧システムの構成の一例を説明する図である。
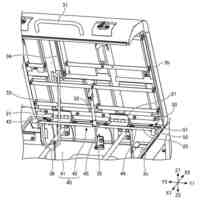
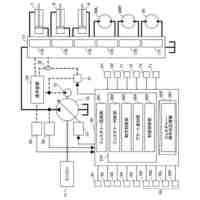
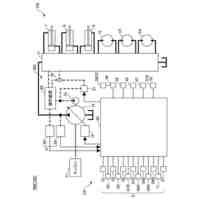
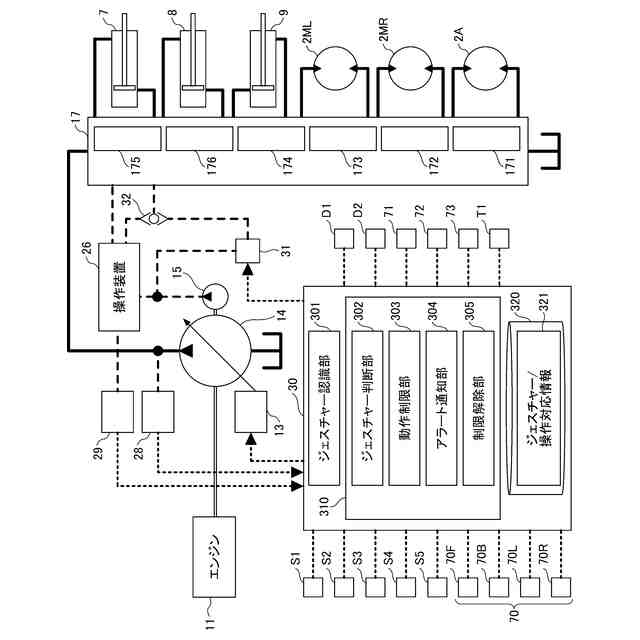
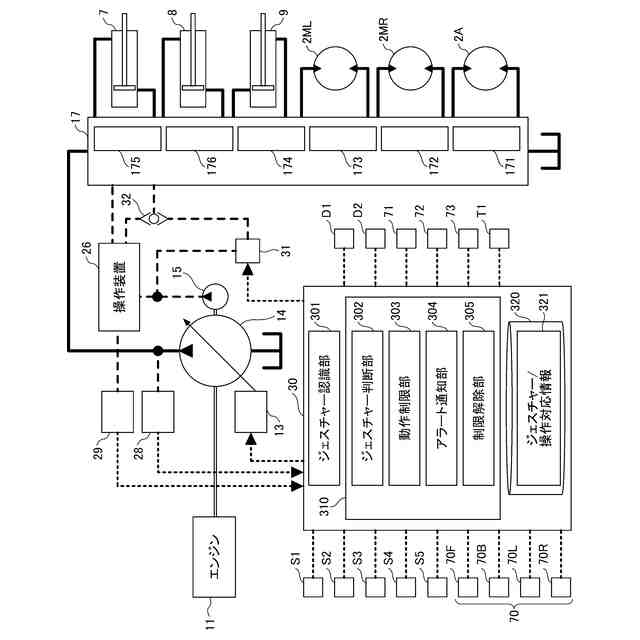
ショベルの駆動系の構成例を示すブロック図である。
ジェスチャー/操作対応情報で規定される認識対象ジェスチャーと動作要素に対する操作内容との対応関係の一例を示す図である。
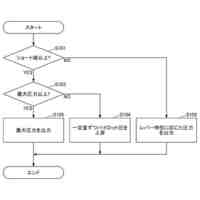
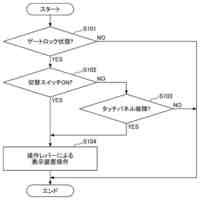
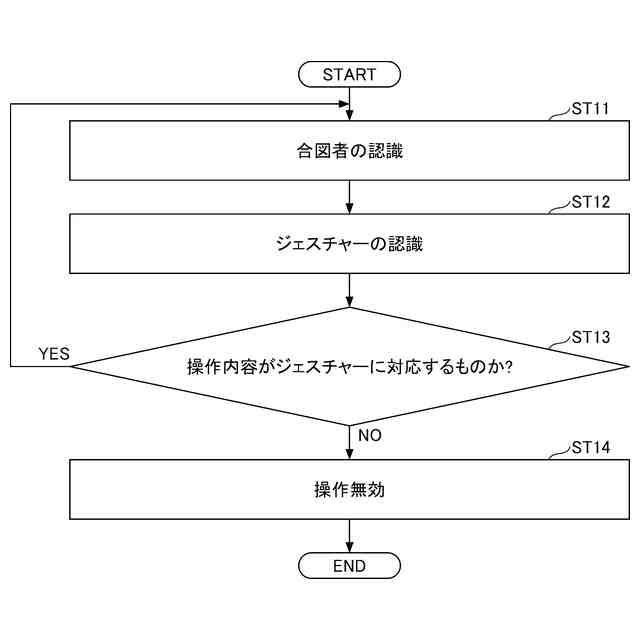
ショベルの動作の一例を説明するためのフローチャートである。
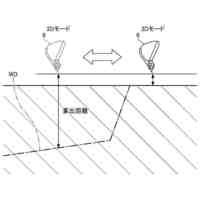
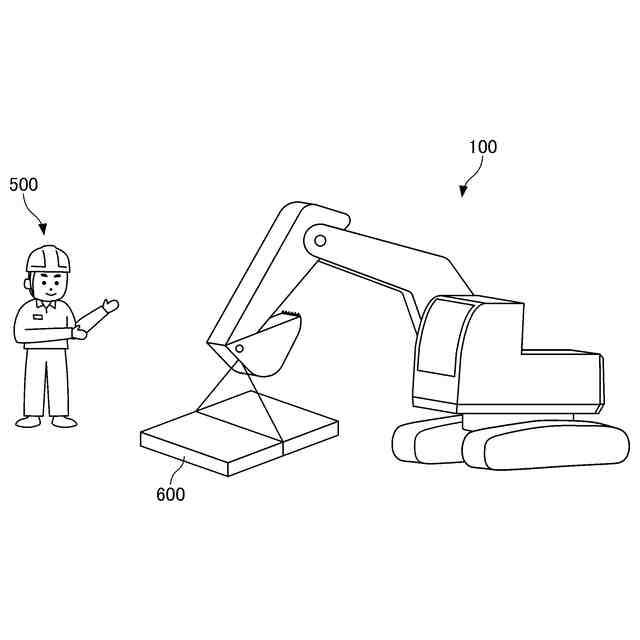
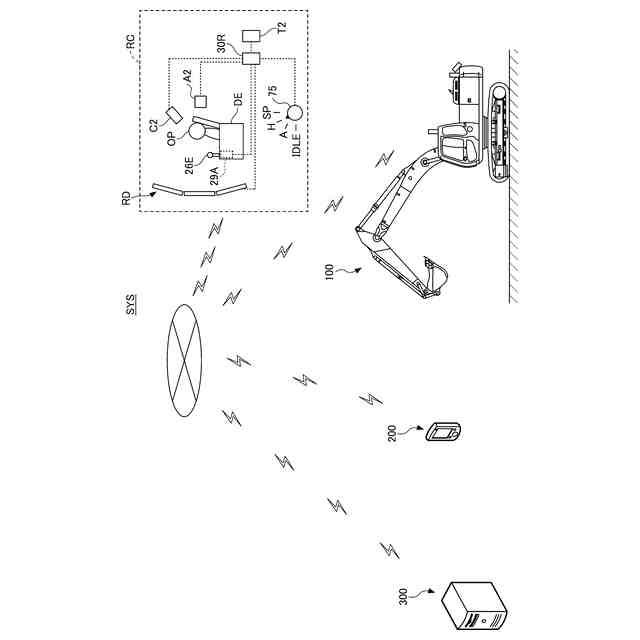
合図者を有する作業現場の一例を示す図である。
ショベルの動作の他の例を説明するためのフローチャートである。
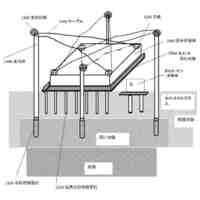
施工システムSYSの一例を示す概略図である。
【発明を実施するための形態】
【0009】
以下に、本発明の実施の形態について図面を参照して説明する。
【0010】
[ショベルの概要]
最初に、図1、図2を参照して、本実施形態に係るショベル100の概要について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
耐震原子炉設備
18日前
鹿島建設株式会社
基礎構造
17日前
株式会社竹中工務店
建築方法
15日前
株式会社クボタ
作業車
9日前
株式会社富田製作所
継手部構造
17日前
住友建機株式会社
ショベル
9日前
住友建機株式会社
作業機械
8日前
住友建機株式会社
ショベル
9日前
住友建機株式会社
作業機械
10日前
住友建機株式会社
ショベル
8日前
住友建機株式会社
ショベル
16日前
住友建機株式会社
ショベル
9日前
株式会社クボタ
作業車両
15日前
日立建機株式会社
建設機械
17日前
日本車輌製造株式会社
建設機械
8日前
株式会社クボタ
作業機
17日前
大仲建設株式会社
スコップ
15日前
住友重機械工業株式会社
ショベル
11日前
住友重機械工業株式会社
ショベル
9日前
戸田建設株式会社
杭頭空間形成装置
11日前
ヤンマーホールディングス株式会社
作業機械
16日前
住友重機械工業株式会社
作業機械の制御装置
15日前
株式会社小松製作所
作業機械
9日前
株式会社マキタ
打撃工具
9日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
22日前
住友建機株式会社
ショベル及びショベルシステム
8日前
大和ハウス工業株式会社
基礎及び基礎の施工方法
9日前
しろくま電力株式会社
支柱設置方法及び仮設治具
9日前
コベルコ建機株式会社
作業支援システム
9日前
住友建機株式会社
ショベル、ショベル用コネクタ
8日前
住友重機械工業株式会社
遠隔操作ショベルシステム
8日前
株式会社日立建機ティエラ
建設機械
15日前
住友建機株式会社
作業機械、作業機械の管理システム
17日前
住友建機株式会社
作業機械、作業機械の管理システム
9日前
株式会社日立建機ティエラ
建設機械
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ