TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099942
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216954
出願日
2023-12-22
発明の名称
自己位置推定装置、衛星通信システム、自己位置推定方法
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
21/28 20060101AFI20250626BHJP(測定;試験)
要約
【課題】測位システムの電波を受信できない環境であって、かつ、車速センサから車速データを取得しなくても、自己位置を推定する。
【解決手段】衛星通信装置のアンテナが搭載される移動体の周囲に存在する構造物を検出する検出部と、前記検出された周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出する速度検出部と、前記検出された移動速度に基づいて、自己位置を推定する推定部を有する。
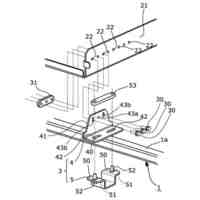
【選択図】図1
特許請求の範囲
【請求項1】
衛星通信装置のアンテナが搭載される移動体の周囲に存在する構造物を検出する周囲状況検出部と、
前記検出された周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出する速度検出部と、
前記検出された移動速度に基づいて、自己位置を推定する推定部
を有する自己位置推定装置。
続きを表示(約 580 文字)
【請求項2】
前記周囲状況検出部は、SLAM(Simultaneous Localization and Mapping)によって前記周囲に存在する構造物を検出し、
前記推定部は、前記速度検出部によって検出された移動速度と、前記SLAMによって得られる結果に基づいて前記構造物に対する前記移動体の向きとに基づいて、自己位置を推定する
請求項1に記載の自己位置推定装置。
【請求項3】
前記移動体は車両である
請求項1に記載の自己位置推定装置。
【請求項4】
請求項1から請求項3のうちいずれか1項に記載の自己位置推定装置と、
前記自己位置推定装置から得られる自己位置推定結果に基づいて、衛星通信を行うためのアンテナの姿勢を制御する姿勢制御部と
を有する衛星通信システム。
【請求項5】
周囲状況検出部が、衛星通信装置のアンテナが搭載される移動体の周囲に存在する構造物を検出し、
速度検出部が、前記検出された結果に基づいて、周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出し、
推定部が、前記検出された周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出する
自己位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定装置、衛星通信システム、自己位置推定方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
衛星通信システムには、車両等の移動体に搭載され、移動先または移動中において衛星通信をすることが可能な車載型の衛星通信システムがある。
移動中において衛星通信を行う場合、現在位置が変化したとしても、現在位置を検出し、現在位置に応じて、衛星と通信可能なアンテナの向きを検出し、アンテナを衛星と通信可能な方向に向けることで、現在位置に応じた衛星を捕捉することができる。これにより、衛星通信を継続することができる。
現在位置の検出方法としては、例えば、車両に搭載されたGNSS(Global Navigation Satellite System)等の測位システムによって現在位置を測位する方法がある。
【先行技術文献】
【特許文献】
【0003】
特開2009-257763公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、車両がトンネル内や、ビル群の間等のような、GNSSの電波を受信できない環境にある場合には、GNSSを用いた測位をすることができないため、衛星を捕捉することができない。
GNSSを用いる方法とは別に、加速度センサによる測位結果を併用する技術(例えば、推測航法)がある。しかしながら、推測航法を用いた測位技術は、相対位置測位となるため、測位時間が長くなると誤差が増える問題がある。精度を上げるためには、定期的な絶対位置測位の結果(例えば、GNSSによる測位結果)を用いた補正が必要となる。このため、例えば、長距離のトンネルのようなGNSS電波を受信できない環境における移動が継続する場合、トンネルを出た直後において、位置推定精度が低い。この場合、衛星を再度捕捉するまでに時間がかかる問題がある。
【0005】
また、車速センサの検出結果を取得し、車両の速度に基づいて、現在位置を推定する方法もある。しかしながら、車速センサから車速データを得るためには、車両のECU(Electronic Control Unit)等から車速センサを得るためのコネクタに、衛星通信システムを接続する必要がある。しかし、車検の際には、衛星通信システムをコネクタから外す必要があり、また、車検終了後には、再度コネクタに接続する必要がある。また、このようなコネクタに衛星通信システムを接続するためには、ダッシュボード等の内装パネルを取り外してから接続等の作業をする必要があり、取り外し・取り付けの手間がかかる。
【0006】
本発明は、このような事情に鑑みてなされたもので、その目的は、測位システムの電波を受信できない環境であって、かつ、車速センサから車速データを取得しなくても、自己位置を推定することができる自己位置推定装置、衛星通信システム、自己位置推定方法を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明の一態様は、衛星通信装置のアンテナが搭載される移動体の周囲に存在する構造物を検出する周囲状況検出部と、前記検出された周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出する速度検出部と、前記検出された移動速度に基づいて、自己位置を推定する推定部を有する自己位置推定装置である。
【0008】
また、本発明の一態様は、周囲状況検出部が、衛星通信装置のアンテナが搭載される移動体の周囲に存在する構造物を検出し、速度検出部が、前記検出された結果に基づいて、周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出し、推定部が、前記検出された周囲の構造物に対する前記移動体の位置の変化に基づいて、前記移動体の移動速度を検出する自己位置推定方法である。
【発明の効果】
【0009】
以上説明したように、この発明によれば、測位システムの電波を受信できない環境であって、かつ、車速センサから車速データを取得しなくても、自己位置を推定することができる。
【図面の簡単な説明】
【0010】
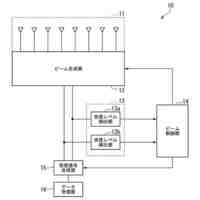
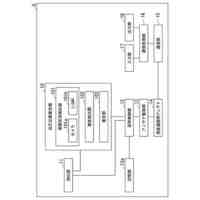
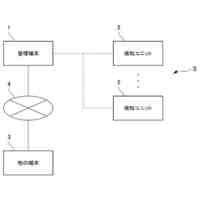
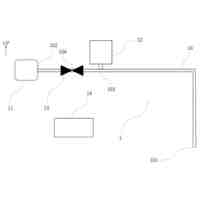
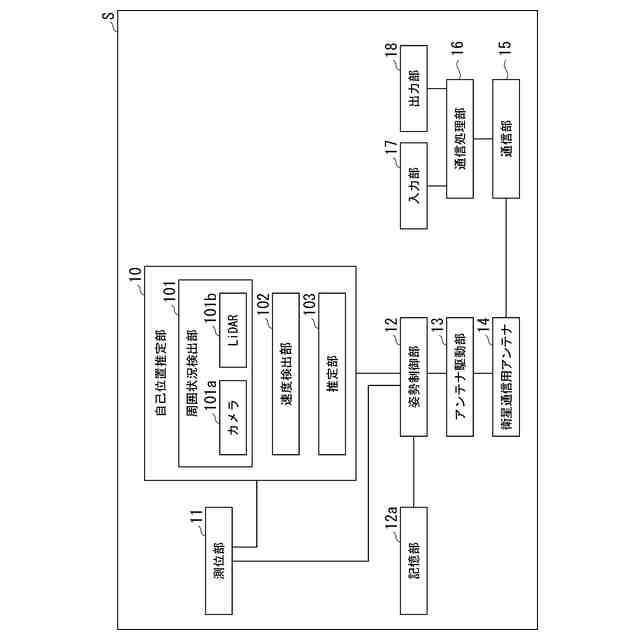
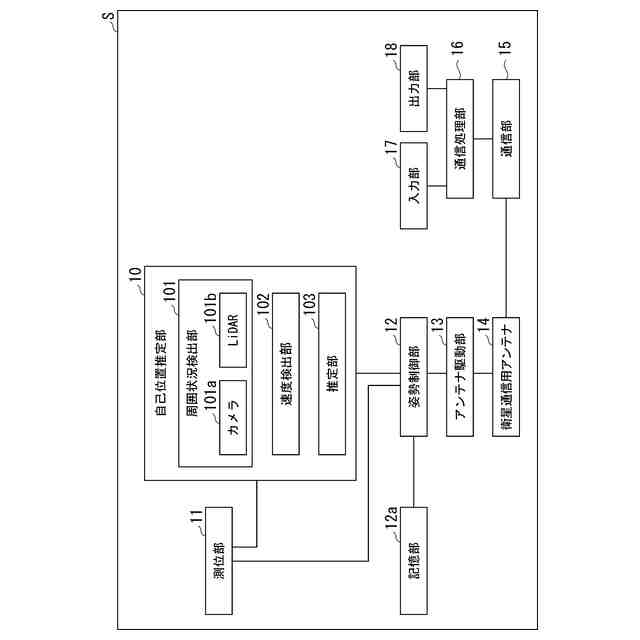
この発明の一実施形態による衛星通信システムの構成を示す概略ブロック図である。
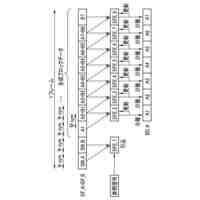
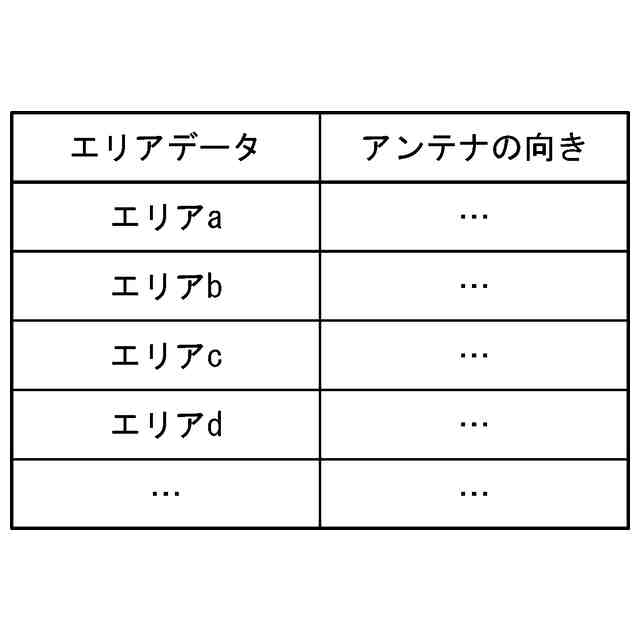
記憶部12aに記憶される姿勢データの一例を示す図である。
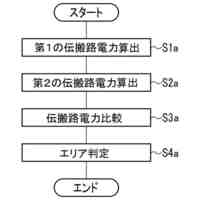
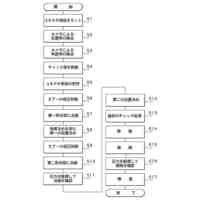
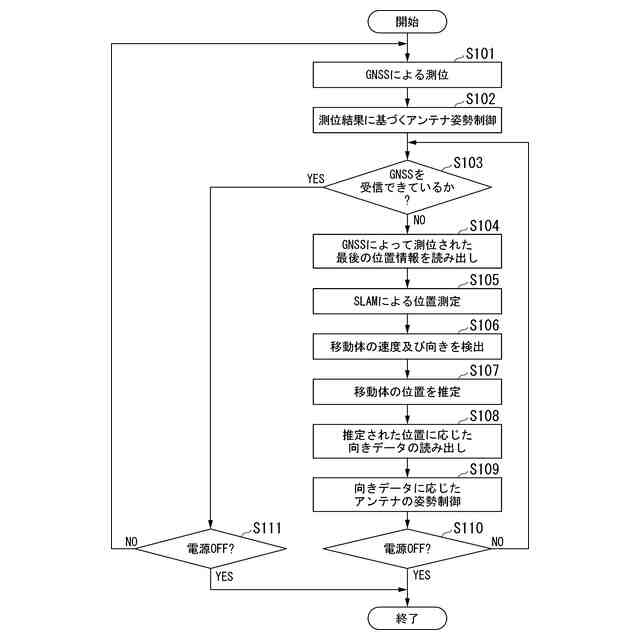
衛星通信システムSの動作について説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本無線株式会社
取付金具
1か月前
日本無線株式会社
無線通信システム
2日前
日本無線株式会社
無線通信システム
7日前
日本無線株式会社
無線通信システム
9日前
長野日本無線株式会社
コネクタ部品の接続方法及び装置
21日前
日本無線株式会社
無線通信装置、通信方法、およびプログラム
24日前
日本無線株式会社
レーダ装置およびレーダ装置における観測対象選択方法
16日前
日本無線株式会社
自己位置推定装置、衛星通信システム、自己位置推定方法
1か月前
日本無線株式会社
船陸間通信回線シミュレータおよび船陸間通信評価システム
9日前
日本無線株式会社
表示制御装置、レーダ装置、表示制御方法、およびプログラム
1か月前
日本無線株式会社
物標探知信号処理装置、物標探知システム及び物標探知信号処理プログラム
28日前
日本無線株式会社
受信信号の異常の検出方法および検出装置、並びに、受信信号の異常の検出方法および検出装置を用いた船舶システム
29日前
ユニパルス株式会社
力変換器
20日前
株式会社豊田自動織機
産業車両
27日前
三菱電機株式会社
計測器
14日前
横浜ゴム株式会社
音響窓
22日前
個人
センサーを備えた装置
24日前
株式会社国際電気
試験装置
1か月前
日置電機株式会社
測定装置
21日前
株式会社辰巳菱機
システム
8日前
日本精機株式会社
施工管理システム
24日前
IPU株式会社
距離検出装置
20日前
株式会社東芝
センサ
23日前
株式会社FRPカジ
FRP装置
10日前
大和製衡株式会社
組合せ計量装置
10日前
株式会社カワタ
サンプリング装置
3日前
TDK株式会社
ガスセンサ
2日前
株式会社CAST
センサ固定治具
27日前
株式会社精工技研
光電圧プローブ
今日
学校法人立命館
液面レベルセンサ
7日前
日本精工株式会社
分注装置
6日前
株式会社田中設備
報知装置
28日前
富士レビオ株式会社
嵌合システム
13日前
WOTA株式会社
液位検出システム
1か月前
三菱マテリアル株式会社
温度センサ
6日前
オムロン株式会社
スイッチング装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ