TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101005
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217523
出願日
2023-12-25
発明の名称
エンドエフェクタ、収穫ロボットおよび収穫方法
出願人
国立大学法人宇都宮大学
,
カゴメ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
A01D
46/24 20060101AFI20250630BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】果実をより確実に収穫できるエンドエフェクタを提供すること。
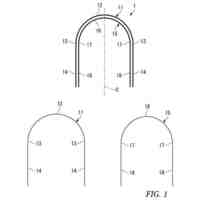
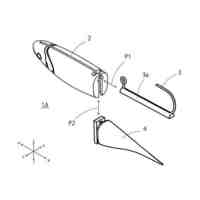
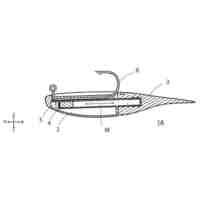
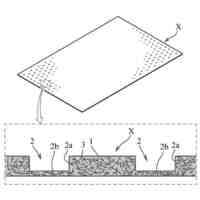
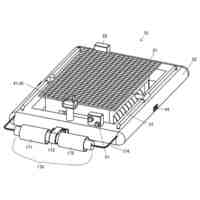
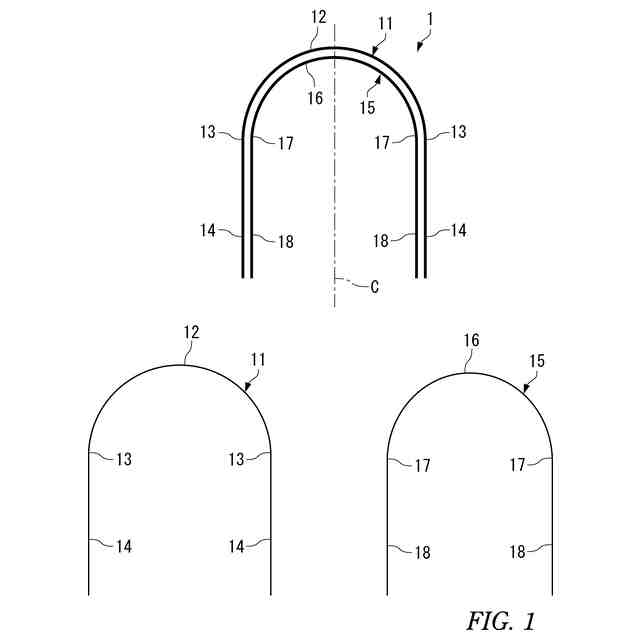
【解決手段】本発明のエンドエフェクタは、
第1剪断部(12)を有する第1剪断要素(11)と、
第2剪断部(16)を有する第2剪断要素(15)と、を備える。
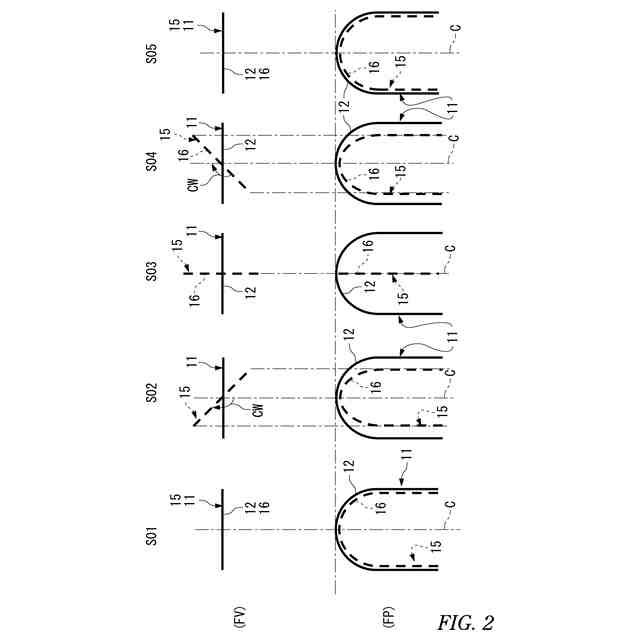
第1剪断部(12)および第2剪断部(16)の一方または双方は、共通する軸線(C)を中心にして回転可能とされ、
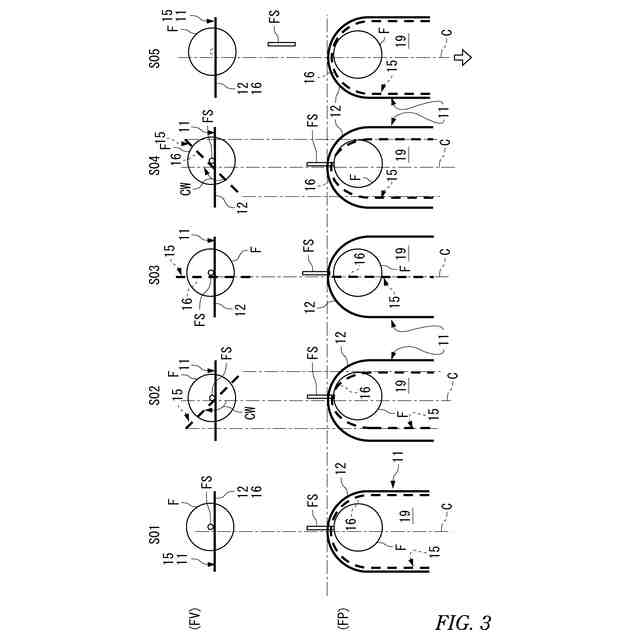
第1剪断部(12)と第2剪断部(16)による互いに逆向きで平行な力を剪断対象に生じさせる。
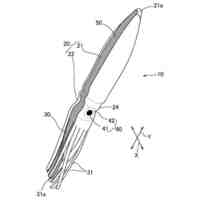
【選択図】図1
特許請求の範囲
【請求項1】
第1剪断部を有する第1剪断要素と、
第2剪断部を有する第2剪断要素と、を備え、
前記第1剪断部および前記第2剪断部の一方または双方は、互いに共通する軸線を中心にして回転可能とされ、
前記第1剪断部と前記第2剪断部による互いに逆向きで平行な力を剪断対象に生じさせるエンドエフェクタ。
続きを表示(約 1,100 文字)
【請求項2】
前記第1剪断要素は、
終端に一対の第1接続端を有する円弧状の前記第1剪断部と、
一対の前記第1接続端のそれぞれに連なる第1伝達部と、を備え、
前記第2剪断要素は、
終端に一対の第2接続端を有する円弧状の前記第2剪断部と、
一対の前記第2接続端のそれぞれに連なる第2伝達部と、を備える、
請求項1に記載のエンドエフェクタ。
【請求項3】
第3剪断部を有する第3剪断要素を備え、
前記第3剪断部は前記軸線を中心にして、前記第1剪断部および前記第2剪断部に対して回転可能とされる、
請求項2に記載のエンドエフェクタ。
【請求項4】
前記第3剪断要素は、
終端に一対の第3接続端を有する円弧状の前記第3剪断部と、
一対の前記第3接続端のそれぞれに連なる第3伝達部と、を備える、
請求項3に記載のエンドエフェクタ。
【請求項5】
前記第1剪断要素と前記第2剪断要素が互いに相似関係を有する、
請求項2に記載のエンドエフェクタ。
【請求項6】
前記第1剪断要素、前記第2剪断要素および前記第3剪断要素が互いに相似関係を有する、
請求項4に記載のエンドエフェクタ。
【請求項7】
前記第1剪断部および前記第2剪断部の一方または双方を、前記第1伝達部および前記第2伝達部の一方または双方を介して回転駆動させる第1駆動部を備える、
請求項2に記載のエンドエフェクタ。
【請求項8】
前記第1剪断部、前記第2剪断部および前記第3剪断部の少なくとも二つを、前記第1伝達部、前記第2伝達部および前記第3伝達部の少なくとも二つを介して回転駆動させる第2駆動部を備える、
請求項4に記載のエンドエフェクタ。
【請求項9】
請求項1に記載のエンドエフェクタと、
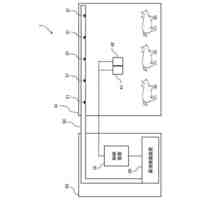
前記エンドエフェクタを位置調整可能に支持するとともに、任意の位置に移動可能な台車と、を備える収穫ロボット。
【請求項10】
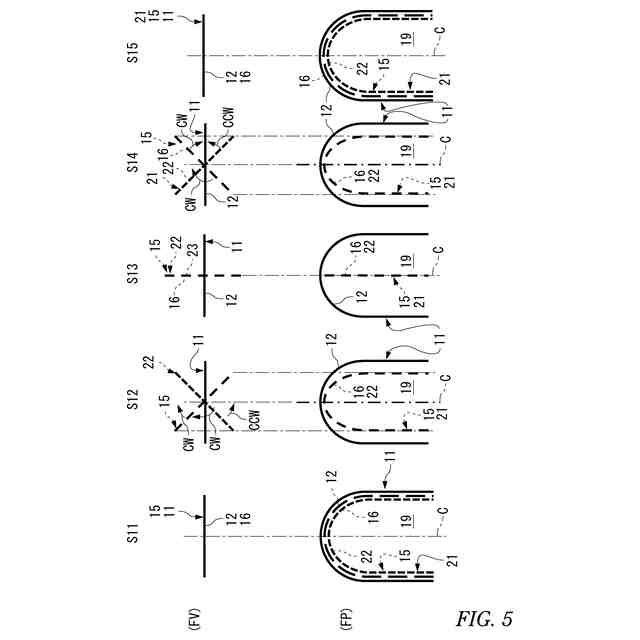
請求項1に記載のエンドエフェクタを用いる収穫対象の収穫方法であって、
前記第1剪断要素の前記第1剪断部および前記第2剪断要素の前記第2剪断部に収穫対象に連なる剪断対象が対応するように前記エンドエフェクタの位置を調整する位置調整ステップと、
前記エンドエフェクタの位置が調整されたままで、前記第1剪断要素および前記第2剪断要素の一方または双方を回転駆動させる剪断ステップと、
を備える収穫方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トマトなどの果実を自動的に収穫するのに好適なエンドエフェクタに関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
労働力不足による農業への影響が懸念されている。そのために、農業の分野、例えば収穫の段階における自動化が積極的に進められている。収穫段階においては、収穫の対象である果実を見つけるセンシング技術の開発、果実を小果梗から離脱させる動作を行うエンドエフェクタ技術の開発などが報告されている。エンドエフェクタ(End Effector)技術としては、果実を離層と呼ばれる部分でもぎ取る方法で収穫することが検討されている。エンドエフェクタとは、ロボットアームの先端に取り付けられ、掴む、加工するなどの動作を行う機器と定義される。
【0003】
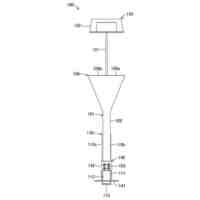
一例として、特許文献1は、収穫効率を向上することが可能なエンドエフェクタを備える収穫ロボットを開示する。特許文献1は、エンドエフェクタを構成する収穫リングに果実を挿通させ、かつ果実が実った果梗に補助部材を押し当てた状態で収穫リングを果実から離れる向きに直線的に移動させる。このとき、押し当てた補助部材が支点に、収穫リングの先端部が作用点となることで、収穫対象である果実の離層部の付近に剪断力が発生し、果実が小果梗から離脱される。
【先行技術文献】
【特許文献】
【0004】
特開2021-036821号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のエンドエフェクタによれば、果実を離層において自動的に分離させることができる。しかし、特許文献1のエンドエフェクタは、果実が挿通された収穫リングを果実から離れる向きに移動させている最中に、補助部材を剪断対象である小果梗に押し当てている必要がある。しかし、狙った小果梗に補助部材を押し当てるのが容易ではない。また、狙った小果梗に補助部材を押し当てられたとしても、収穫リングを移動させている最中に、この収穫リングの移動により小果梗に引張力が作用することで、押し当てていた小果梗が補助部材から逃げることがある。つまり、特許文献1のエンドエフェクタによれば、補助部材を小果梗に押し当てることが不確定要素となることから、果実の収穫をできないことが想定される。
そこで、本発明は、果実をより確実に収穫できるエンドエフェクタを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明のエンドエフェクタは、
第1剪断部を有する第1剪断要素と、
第2剪断部を有する第2剪断要素と、を備える。
第1剪断部および第2剪断部の一方または双方は、互いに共通する軸線を中心にして回転可能とされ、
第1剪断部と第2剪断部による互いに逆向きで平行な力を剪断対象に生じさせる。
【0007】
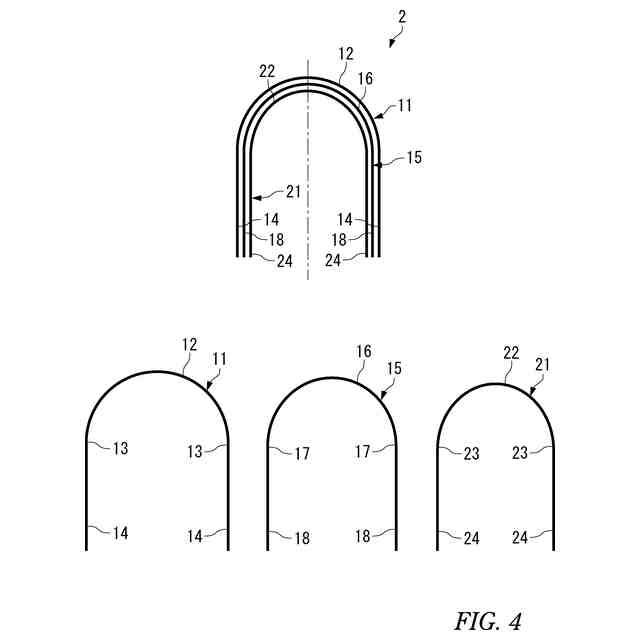
第1剪断要素は、好ましくは、
終端に一対の第1接続端を有する円弧状の第1剪断部と、
一対の第1接続端のそれぞれに連なる第1伝達部と、を備える。
第2剪断要素は、好ましくは、
終端に一対の第2接続端を有する円弧状の第2剪断部と、
一対の第2接続端のそれぞれに連なる第2伝達部と、を備える。
【0008】
好ましいエンドエフェクタは、第3剪断部を有する第3剪断要素を備え、
第3剪断部は軸線を中心にして、第1剪断部および第2剪断部に対して回転可能とされる。
【0009】
第3剪断要素は、好ましくは、
終端に一対の第3接続端を有する円弧状の第3剪断部と、
一対の第3接続端のそれぞれに連なる第3伝達部と、を備える。
【0010】
第1剪断要素と第2剪断要素は、好ましくは、互いに相似関係を有する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人宇都宮大学
ゲート装置
1か月前
国立大学法人宇都宮大学
低摩擦部材、運動機構、及び衣類
14日前
国立大学法人宇都宮大学
化学滴定方法、及び化学滴定システム
1か月前
国立大学法人宇都宮大学
エンドエフェクタおよび果実の離脱方法
1か月前
国立大学法人宇都宮大学
エンドエフェクタ、収穫ロボットおよび収穫方法
3日前
国立大学法人宇都宮大学
蛍光体、蛍光体を含む光源、および新規無機酸化物
3か月前
国立大学法人宇都宮大学
空気中微生物濃度制御システム、及び空気中微生物濃度制御装置
2か月前
株式会社K-マテリアルズラボ
化合物、潜熱蓄熱材、潜熱蓄熱体、電子デバイス、及び蓄電デバイス
1か月前
個人
釣り用ルアー
1日前
個人
釣り用ルアー
1日前
個人
播種機
14日前
個人
尿処理材
29日前
井関農機株式会社
作業車両
2日前
個人
室内栽培システム
10日前
井関農機株式会社
圃場作業機
3日前
有限会社マイク
囲い罠
7日前
井関農機株式会社
コンバイン
7日前
株式会社シマノ
釣り具
7日前
井関農機株式会社
圃場管理装置
29日前
井関農機株式会社
圃場管理装置
29日前
井関農機株式会社
歩行型管理機
1日前
井関農機株式会社
圃場管理装置
29日前
井関農機株式会社
移植機
14日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
圃場管理装置
21日前
井関農機株式会社
作業車両
14日前
株式会社シマノ
釣竿
2日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
14日前
株式会社ダイイチ
海苔網の酸処理船
10日前
株式会社山田鉄工
海苔網処理船
10日前
株式会社山田鉄工
海苔網処理船
10日前
松山株式会社
草刈作業機
今日
株式会社村岡水産
釣り用ワーム
1日前
株式会社山田鉄工
海苔網処理船
10日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ