TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103468
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220881
出願日
2023-12-27
発明の名称
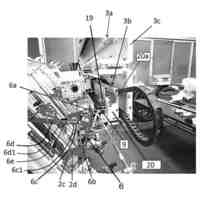
歩行型管理機
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
作業者が機体に追従して歩く必要が無い、遠隔操作が可能な歩行型管理機を提供する。
【解決手段】
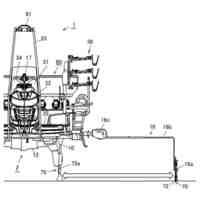
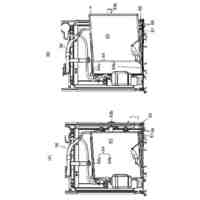
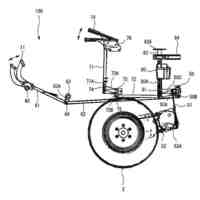
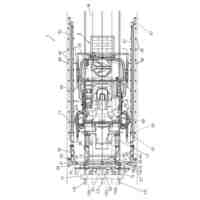
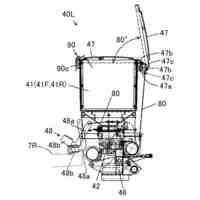
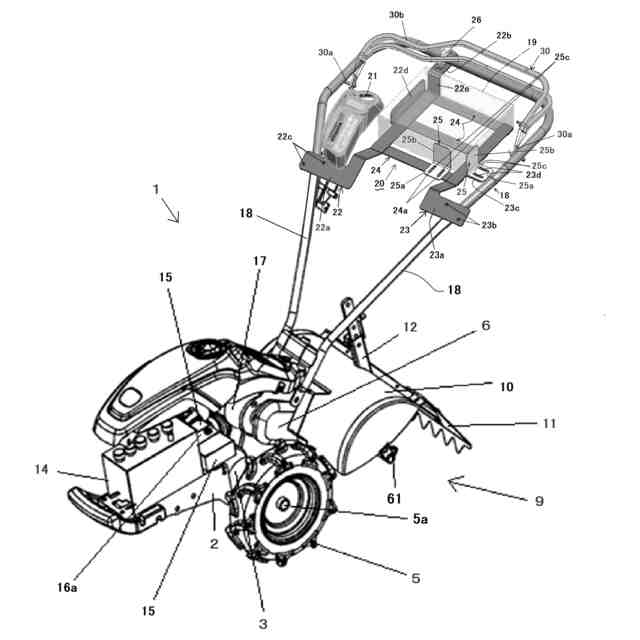
走行装置と、対地作業装置を備え、通信機能を有する制御装置80を設け、制御装置80を操縦装置81と通信可能に構成し、操縦装置81と制御装置80が通信状態でないとき、制御装置80は、走行装置と対地作業装置への伝動を遮断する構成とすると共に、走行装置に駆動力を伝動する走行駆動源15と、対地作業装置に駆動力を伝動する作業駆動源17を設け、走行駆動源15から走行装置5への駆動力の伝動を入切する走行クラッチ55と、作業駆動源17から対地作業装置への駆動力の伝動を入切する作業伝動部材を設け、操縦装置81と制御装置80が通信状態でないとき、制御装置80は、走行クラッチ55と作業伝動部材が伝動を遮断する状態に切り替える構成とする。
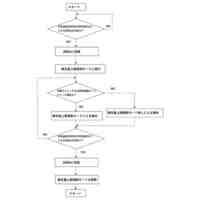
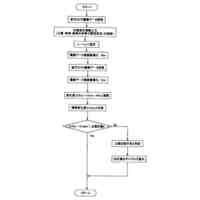
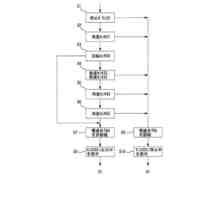
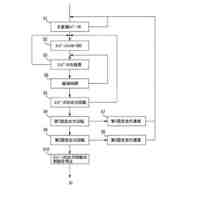
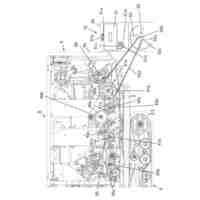
【選択図】図9
特許請求の範囲
【請求項1】
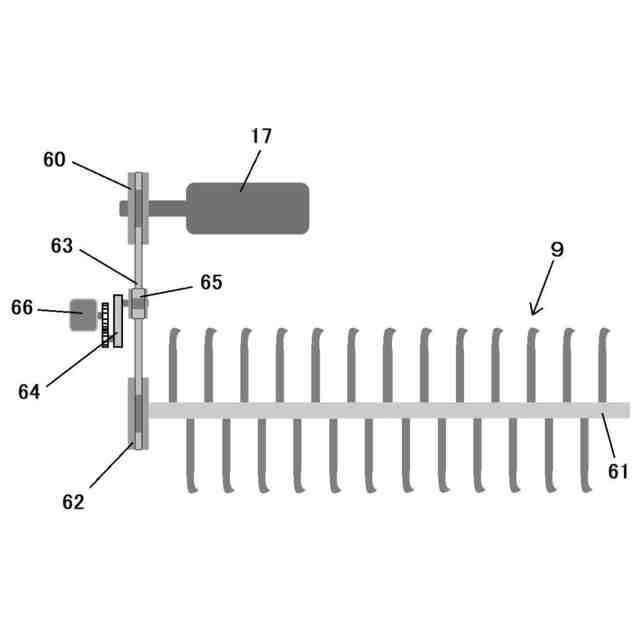
機体に圃場を走行する走行装置(5)と、圃場の耕耘や畝立等を行う対地作業装置(9)を備える歩行型管理機において、
機体に通信機能を有する制御装置(80)を設け、該制御装置(80)を前記走行装置(5)と対地作業装置(9)の操作を行う操縦装置(81)と通信可能に構成し、
該操縦装置(81)と制御装置(80)が通信状態でないとき、制御装置(80)は、前記走行装置(5)と対地作業装置(9)への伝動を遮断することを特徴とする歩行型管理機。
続きを表示(約 1,300 文字)
【請求項2】
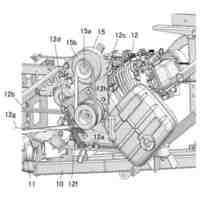
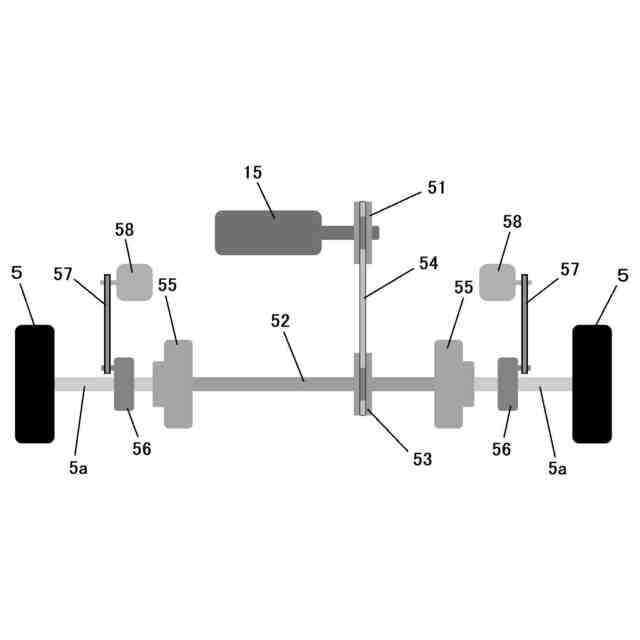
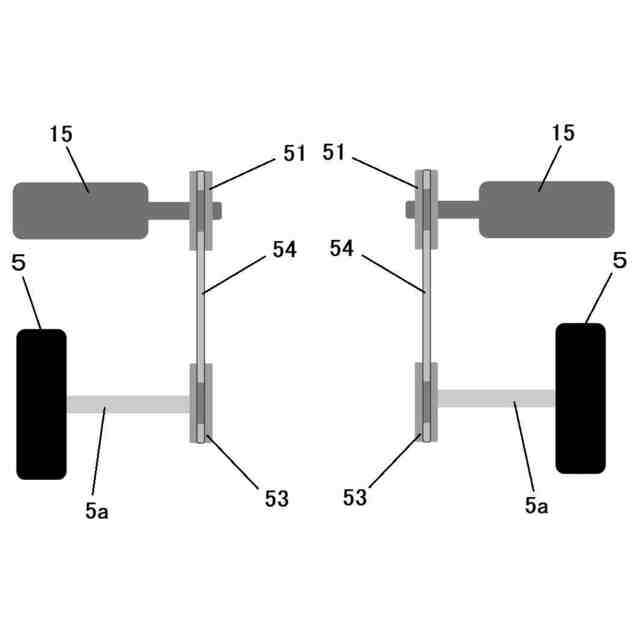
前記走行装置(5)に駆動力を伝動する走行駆動源(15)と、前記対地作業装置(9)に駆動力を伝動する作業駆動源(17)を設け、
前記走行駆動源(15)から走行装置(5)への駆動力の伝動を入切する走行クラッチ(55)と、前記作業駆動源(17)から対地作業装置(9)への駆動力の伝動を入切する作業伝動部材(64,65)を設け、
前記操縦装置(81)と制御装置(80)が通信状態でないとき、前記制御装置(80)は、走行クラッチ(55)と作業伝動部材(64,65)が伝動を遮断する状態に切り替えることを特徴とする請求項1に記載の歩行型管理機。
【請求項3】
前記操縦装置(81)は、前記走行伝動源(15)の出力を操作する走行出力操作部材(92,93)と、前記作業駆動源(17)の出力を操作する作業出力操作部材(100)を設け、
前記操縦装置(81)と制御装置(80)の通信状態が途絶したとき、前記制御装置(80)は、前記走行出力操作部材(92,93)及び作業出力操作部材(100)の設定出力を記録し、
通信状態が復帰したときには、前記制御装置(80)に記録された設定出力を上限として、段階的に前記走行伝動源(15)及び作業駆動源(17)の出力を上昇させることを特徴とする請求項2に記載の歩行型管理機。
【請求項4】
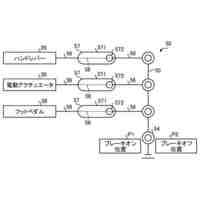
前記操縦装置(81)は、機体を前進させる前進部材(94)、後進させる後進部材(95)、左側の前記走行装置(5)への伝動の強弱を操作する左操作部材(96)及び右側の前記走行装置(5)への伝動の強弱を操作する右操作部材(97)を設け、
該前進部材(94)または後進部材(95)が操作されると左操作部材(96)及び右操作部材(97)の操作を受付可能に切り替わり、
該左操作部材(96)と右操作部材(97)を異なるタイミングで断続的に操作することで進行方向の左右調節が行われ、
該左操作部材(96)と右操作部材(97)のうち、どちらか一方を連続的に操作することで左右方向の旋回走行が行われ、
該左操作部材(96)と右操作部材(97)を同時に操作することで走行の一時停止が行われることを特徴とする請求項2または3に記載の歩行型管理機。
【請求項5】
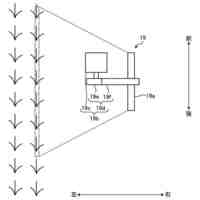
バランスウェイト(84)を前後移動させて機体の前後バランスを調節する傾動ウェイト機構(83)を設け、該バランスウェイト(84)を前後移動させるバランス調節アクチュエータ(88)を設け、前記バランスウェイト(84)の前後位置を検出する位置検出部材(89)を設け、
前記制御装置(80)は、前記操縦装置(81)との通信状態が途絶したとき、該位置検出部材(89)が検出する前記バランスウェイト(84)の位置が設定位置より機体前側であるときは、前記バランス調節アクチュエータ(88)を作動させ、バランスウェイト(84)を設定位置まで後方に移動させることを特徴とする請求項1から3のいずれか1項に記載の歩行型管理機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業者が遠隔操作しながら耕耘等の対地作業を行う歩行型管理機に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、機体に左右の走行輪を有すると共に、機体後部に圃場面を耕耘する耕耘装置を備え、作業者が後側上方に伸びる操縦ハンドルで進行方向の調節や旋回操作、走行速度や耕耘装置の作業高さ等の操縦を行う歩行型管理機が存在する。(特許文献1参照)
【先行技術文献】
【特許文献】
【0003】
特開2021‐192646号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の歩行型管理機は、作業者が機体の後方について歩き、逐次操縦操作を行う必要があり、作業者に大きな労力がかかるものとなっていた。
【0005】
本発明は、上記に鑑みてなされたものであって、作業者が機体に追従して歩く必要が無い、遠隔操作が可能な歩行型管理機を提供することである。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、機体に圃場を走行する走行装置(5)と、圃場の耕耘や畝立等を行う対地作業装置(9)を備える歩行型管理機において、機体に通信機能を有する制御装置(80)を設け、該制御装置(80)を前記走行装置(5)と対地作業装置(9)の操作を行う操縦装置(81)と通信可能に構成し、該操縦装置(81)と制御装置(80)が通信状態でないとき、制御装置(80)は、前記走行装置(5)と対地作業装置(9)への伝動を遮断することを特徴とする歩行型管理機である。
【0007】
請求項2記載の発明は、前記走行装置(5)に駆動力を伝動する走行駆動源(15)と、前記対地作業装置(9)に駆動力を伝動する作業駆動源(17)を設け、前記走行駆動源(15)から走行装置(5)への駆動力の伝動を入切する走行クラッチ(55)と、前記作業駆動源(17)から対地作業装置(9)への駆動力の伝動を入切する作業伝動部材(64,65)を設け、前記操縦装置(81)と制御装置(80)が通信状態でないとき、前記制御装置(80)は、走行クラッチ(55)と作業伝動部材(64,65)が伝動を遮断する状態に切り替えることを特徴とする請求項1に記載の歩行型管理機である。
【0008】
請求項3記載の発明は、前記操縦装置(81)は、前記走行伝動源(15)の出力を操作する走行出力操作部材(92,93)と、前記作業駆動源(17)の出力を操作する作業出力操作部材(100)を設け、前記操縦装置(81)と制御装置(80)の通信状態が途絶したとき、前記制御装置(80)は、前記走行出力操作部材(92,93)及び作業出力操作部材(100)の設定出力を記録し、通信状態が復帰したときには、前記制御装置(80)に記録された設定出力を上限として、段階的に前記走行伝動源(15)及び作業駆動源(17)の出力を上昇させることを特徴とする請求項2に記載の歩行型管理機である。
【0009】
請求項4記載の発明は、前記操縦装置(81)は、機体を前進させる前進部材(94)、後進させる後進部材(95)、左側の前記走行装置(5)への伝動の強弱を操作する左操作部材(96)及び右側の前記走行装置(5)への伝動の強弱を操作する右操作部材(97)を設け、該前進部材(94)または後進部材(95)が操作されると左操作部材(96)及び右操作部材(97)の操作を受付可能に切り替わり、該左操作部材(96)と右操作部材(97)を異なるタイミングで断続的に操作することで進行方向の左右調節が行われ、該左操作部材(96)と右操作部材(97)のうち、どちらか一方を連続的に操作することで左右方向の旋回走行が行われ、該左操作部材(96)と右操作部材(97)を同時に操作することで走行の一時停止が行われることを特徴とする請求項2または3に記載の歩行型管理機である。
【0010】
請求項5記載の発明は、バランスウェイト(84)を前後移動させて機体の前後バランスを調節する傾動ウェイト機構(83)を設け、該バランスウェイト(84)を前後移動させるバランス調節アクチュエータ(88)を設け、前記バランスウェイト(84)の前後位置を検出する位置検出部材(89)を設け、前記制御装置(80)は、前記操縦装置(81)との通信状態が途絶したとき、該位置検出部材(89)が検出する前記バランスウェイト(84)の位置が設定位置より機体前側であるときは、前記バランス調節アクチュエータ(88)を作動させ、バランスウェイト(84)を設定位置まで後方に移動させることを特徴とする請求項1から3のいずれか1項に記載の歩行型管理機である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
24日前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
今日
井関農機株式会社
精米設備
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用草刈機
1か月前
井関農機株式会社
コンバイン
今日
井関農機株式会社
施肥作業機
1か月前
井関農機株式会社
コンバイン
8日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
17日前
井関農機株式会社
乗用草刈機
1か月前
井関農機株式会社
圃場作業機
1か月前
井関農機株式会社
コンバイン
25日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ