TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108966
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024002553
出願日
2024-01-11
発明の名称
フォークリフト
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20250716BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】積付位置の検出精度を高くすること。
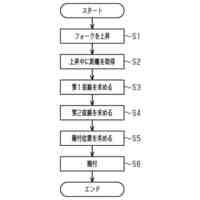
【解決手段】フォークリフトは、フォークと、1次元の距離計と、制御部と、を備える。制御部は、荷を置く荷置き対象が前方に位置している状態でフォークを上昇させる。制御部は、フォークの上昇中に距離計によって測定される荷置き対象までの距離を取得する。制御部は、フォークの上昇中に取得された距離のうち閾値未満の距離から第1直線を求める。制御部は、距離計によって測定される距離が閾値を超えた高さを表す第2直線を求める。制御部は、第1直線と第2直線との交点から荷置き対象における荷が置かれる荷置き面上の積付位置を求める。
【選択図】図5
特許請求の範囲
【請求項1】
荷が積載される2つのフォークと、
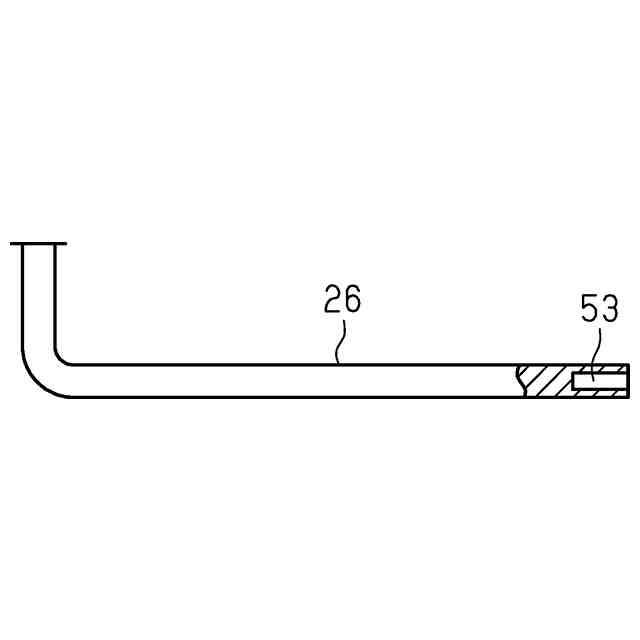
前記フォークとともに昇降するように設けられており、かつ、前方に存在する物体までの距離を測定する1次元の距離計と、
制御部と、を備え、
前記制御部は、
前記荷を置く荷置き対象が前方に位置している状態で前記フォークを上昇させ、
前記フォークの上昇中に前記距離計によって測定される前記荷置き対象までの距離を取得し、
前記フォークの上昇中に取得された前記距離のうち閾値未満の前記距離から第1直線を求め、
前記距離計によって測定される前記距離が閾値を超えた高さを表す第2直線を求め、
前記第1直線と前記第2直線との交点から前記荷置き対象における前記荷が置かれる荷置き面上の積付位置を求める、フォークリフト。
続きを表示(約 330 文字)
【請求項2】
前記荷置き対象は、トラックであり、
前記制御部は、前記交点に所定距離を加算した位置を前記積付位置とする、請求項1に記載のフォークリフト。
【請求項3】
前記距離計は、前記フォークの先端に設けられている、請求項1又は請求項2に記載のフォークリフト。
【請求項4】
前記距離計は、前記2つのフォークのそれぞれに設けられており、
前記制御部は、
2つの前記距離計のそれぞれで測定された前記距離毎に前記交点を求め、
2つの前記距離計のそれぞれから対応する前記交点までの距離が長い方を、前記積付位置を求めるのに用いられる前記交点として採用する、請求項1又は請求項2に記載のフォークリフト。
発明の詳細な説明
【技術分野】
【0001】
本開示は、フォークリフトに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1に開示のフォークリフトは、3次元座標系の座標で物体の位置を検出する外界センサと、制御装置と、を備える。制御装置は、外界センサから3次元座標系の座標を取得する。制御装置は、取得した座標から荷の積み付けを行う積付位置を検出する。
【先行技術文献】
【特許文献】
【0003】
特開2023-30983号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
外界センサが3次元座標系の座標を検出する場合、座標の検出精度が低下する。例えば、レーザーを照射することで3次元座標系の座標を検出する外界センサの場合、回転機構によってミラーを回転させながらレーザー素子がレーザーを発する。これを原因として、座標の検出精度が低下する。結果として、積付位置の検出精度が低下する場合がある。
【課題を解決するための手段】
【0005】
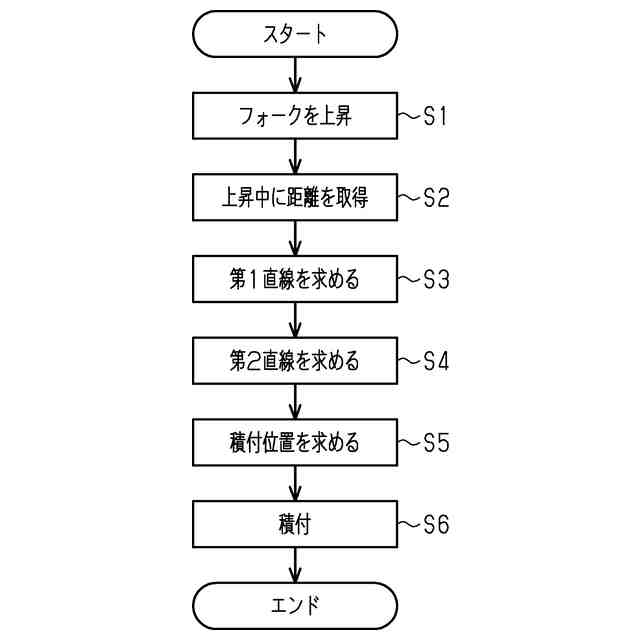
上記課題を解決するフォークリフトは、荷が積載される2つのフォークと、前記フォークとともに昇降するように設けられており、かつ、前方に存在する物体までの距離を測定する1次元の距離計と、制御部と、を備え、前記制御部は、前記荷を置く荷置き対象が前方に位置している状態で前記フォークを上昇させ、前記フォークの上昇中に前記距離計によって測定される前記荷置き対象までの距離を取得し、前記フォークの上昇中に取得された前記距離のうち閾値未満の前記距離から第1直線を求め、前記距離計によって測定される前記距離が閾値を超えた高さを表す第2直線を求め、前記第1直線と前記第2直線との交点から前記荷置き対象における前記荷が置かれる荷置き面上の積付位置を求める。
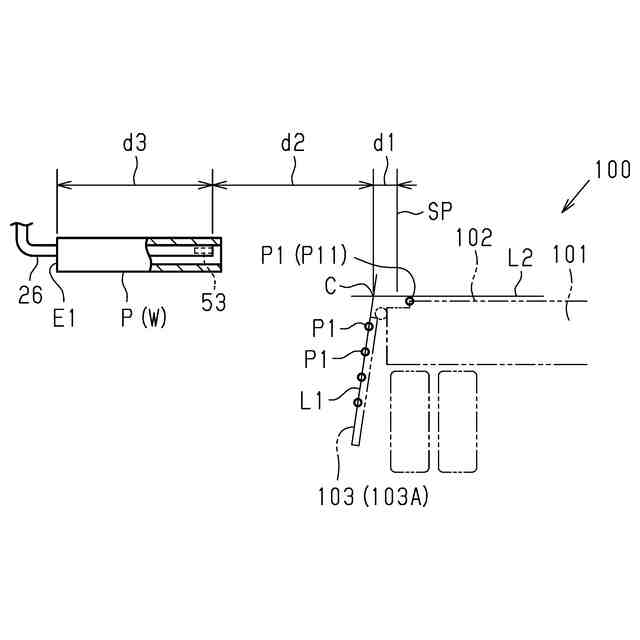
【0006】
荷置き対象が前方に位置している状態でフォークを上昇させると、距離計は、荷置き対象までの距離を測定しながら上昇していく。距離計の高さが荷置き面よりも高くなると、距離計によって測定される距離が長くなる。従って、閾値未満の距離から求められた第1直線は、荷置き対象のうち荷置き面よりも下方に位置する部位の形状に倣った直線となる。また、第2直線は、荷置き面の高さを表す。従って、第1直線と第2直線との交点から積付位置を求めることができる。1次元の距離計を用いて積付位置を求めることができるため、積付位置の検出精度を高くすることができる。
【0007】
上記フォークリフトについて、前記荷置き対象は、トラックであり、前記制御部は、前記交点に所定距離を加算した位置を前記積付位置としてもよい。
上記フォークリフトについて、前記距離計は、前記フォークの先端に設けられていてもよい。
【0008】
上記フォークリフトについて、前記距離計は、前記2つのフォークのそれぞれに設けられており、前記制御部は、2つの前記距離計のそれぞれで測定された前記距離毎に前記交点を求め、2つの前記距離計のそれぞれから対応する前記交点までの距離が長い方を、前記積付位置を求めるのに用いられる前記交点として採用してもよい。
【発明の効果】
【0009】
本発明によれば、積付位置の検出精度を高くすることができる。
【図面の簡単な説明】
【0010】
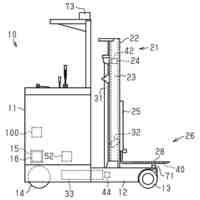
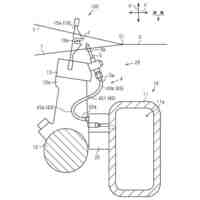
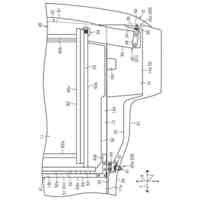
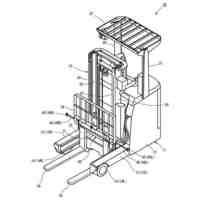
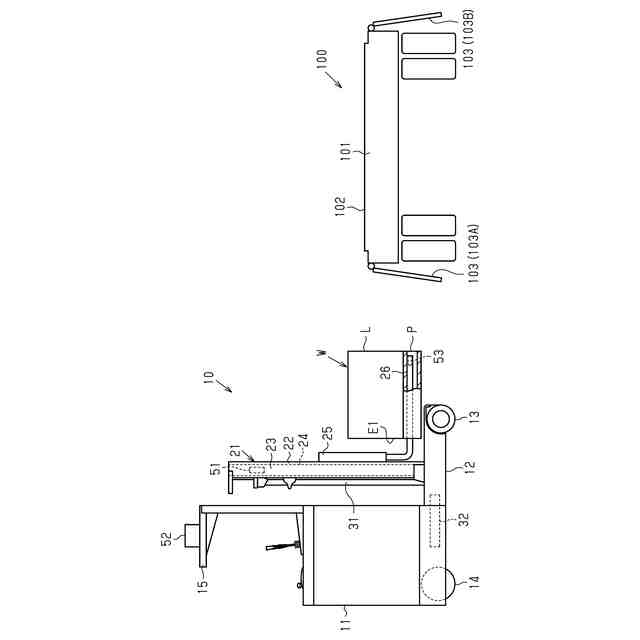
図1はフォークリフトの側面図である。
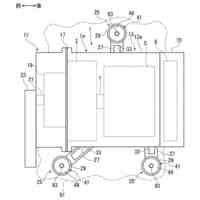
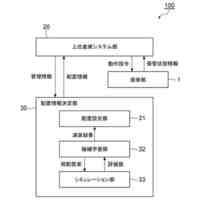
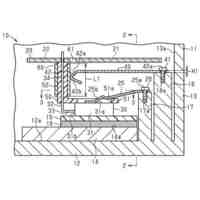
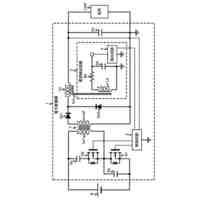
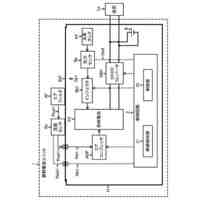
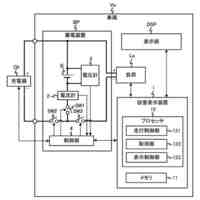
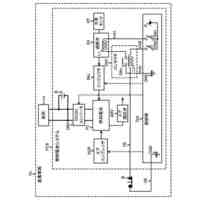
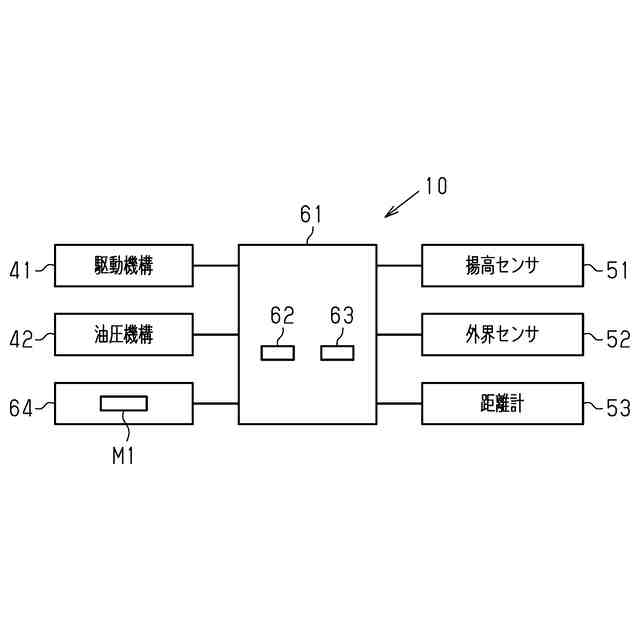
図2はフォークリフトの概略構成図である。
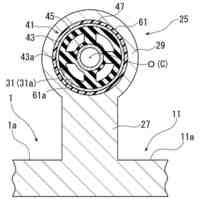
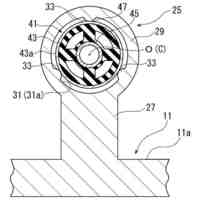
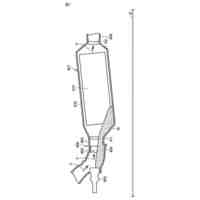
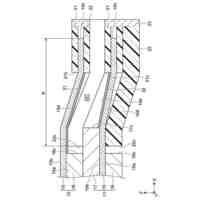
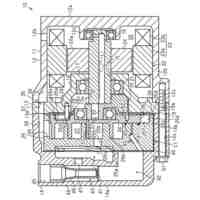
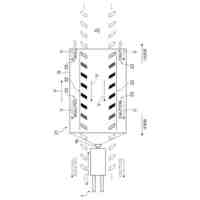
図3はフォークの一部を破断して示す断面図である。
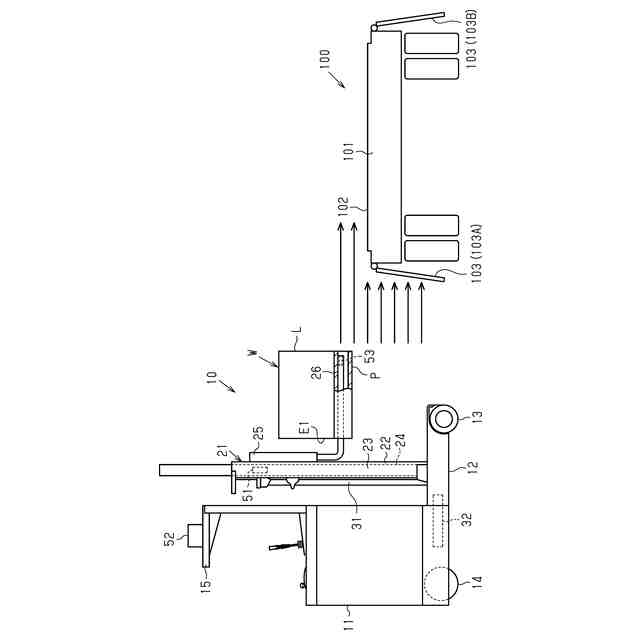
図4はフォークリフト及び荷置き対象を示す図である。
図5は積付制御を示すフローチャートである。
図6はフォークを上昇させた状態のフォークリフト及び荷置き対象を示す図である。
図7は第1直線及び第2直線を示す図である。
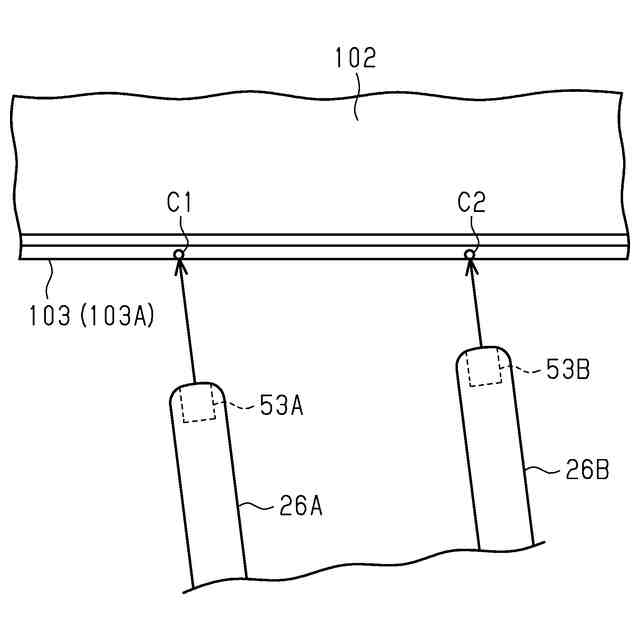
図8は2つのフォークのそれぞれに設けられた距離計を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
圧縮機
4日前
株式会社豊田自動織機
圧縮機
4日前
株式会社豊田自動織機
圧縮機
4日前
株式会社豊田自動織機
内燃機関
今日
株式会社豊田自動織機
仕分け装置
19日前
株式会社豊田自動織機
電動圧縮機
26日前
株式会社豊田自動織機
電動圧縮機
3日前
株式会社豊田自動織機
電動圧縮機
25日前
株式会社豊田自動織機
遠心圧縮機
今日
株式会社豊田自動織機
電動圧縮機
20日前
株式会社豊田自動織機
電動圧縮機
19日前
株式会社豊田自動織機
制御システム
25日前
株式会社豊田自動織機
倉庫システム
20日前
株式会社豊田自動織機
倉庫システム
21日前
株式会社豊田自動織機
排気浄化装置
4日前
株式会社豊田自動織機
フォークリフト
4日前
株式会社豊田自動織機
フォークリフト
21日前
株式会社豊田自動織機
蓄電モジュール
26日前
株式会社豊田自動織機
電子部品ユニット
26日前
株式会社豊田自動織機
電子部品ユニット
26日前
株式会社豊田自動織機
燃料電池用ポンプ
20日前
株式会社豊田自動織機
エアジェット織機
25日前
株式会社豊田自動織機
スクロール型圧縮機
26日前
株式会社豊田自動織機
燃料電池モジュール
11日前
株式会社豊田自動織機
燃料電池モジュール
3日前
株式会社豊田自動織機
機能構造体の製造方法
26日前
株式会社豊田自動織機
車両用スライドデッキ装置
20日前
株式会社豊田自動織機
産業車両及び画像投影方法
21日前
株式会社豊田自動織機
電力変換器及び電流検出回路
26日前
株式会社豊田自動織機
サイドシフトフォークリフト
25日前
株式会社豊田自動織機
燃料電池ユニット及び産業車両
3日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
6日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
6日前
株式会社豊田自動織機
容量表示方法及び容量表示装置
25日前
株式会社豊田自動織機
燃料電池システム及び産業車両
12日前
株式会社豊田自動織機
制御装置、及びパレットロック装置
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ