TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107817
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001285
出願日
2024-01-09
発明の名称
フォークリフトの荷役制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20250714BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】パレットの傾斜の有無に関わらず、パレットのパレット孔にフォークを適切に差し込むことができるフォークリフトの荷役制御装置を提供する。
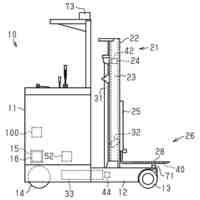
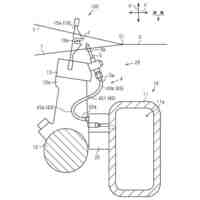
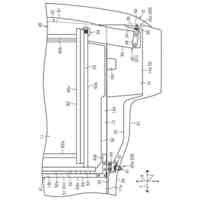
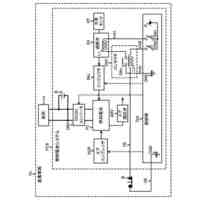
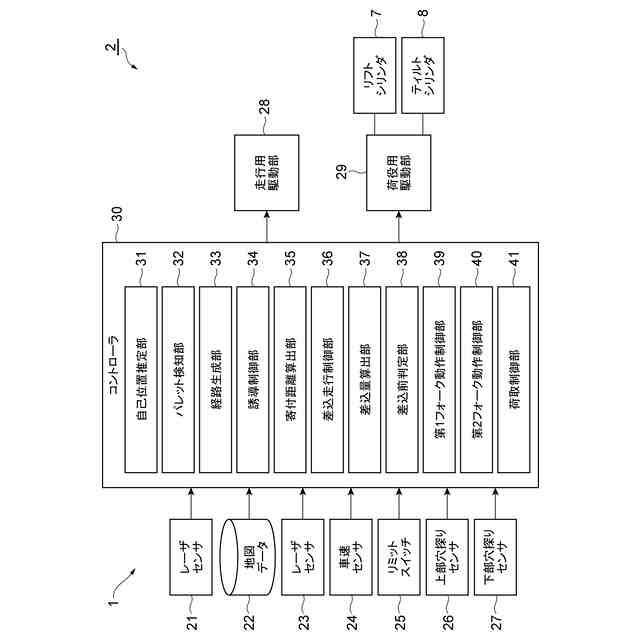
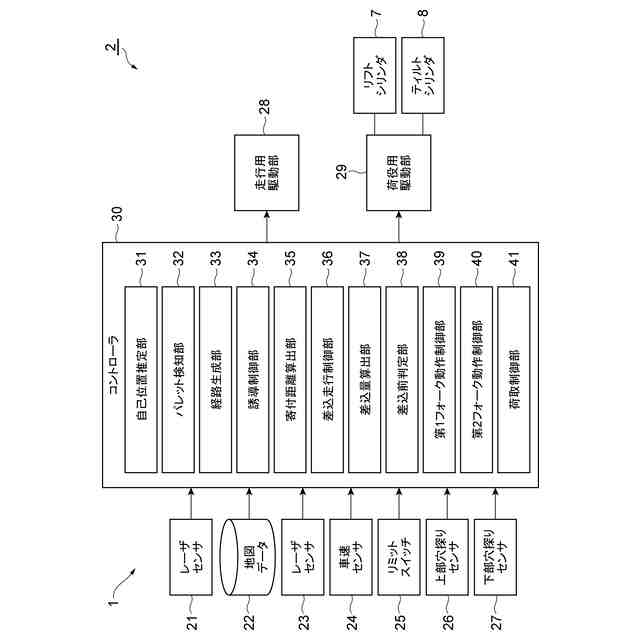
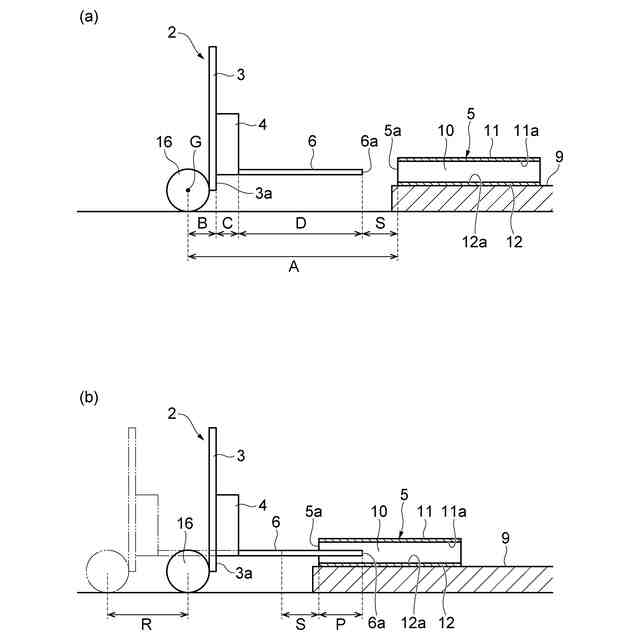
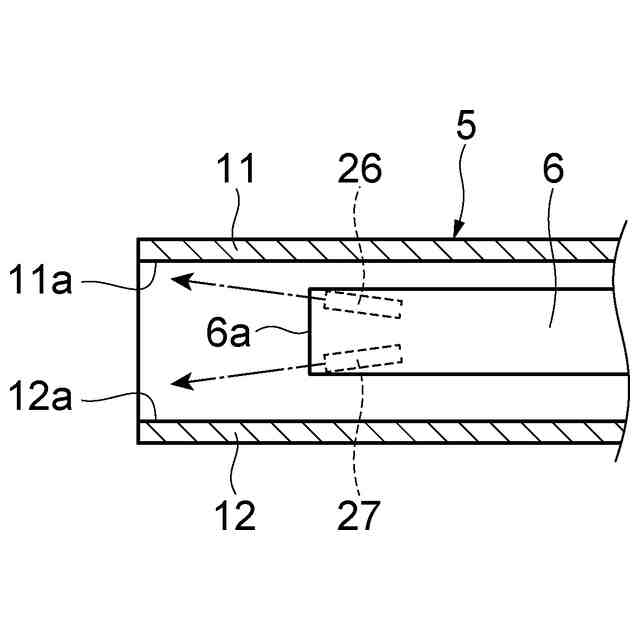
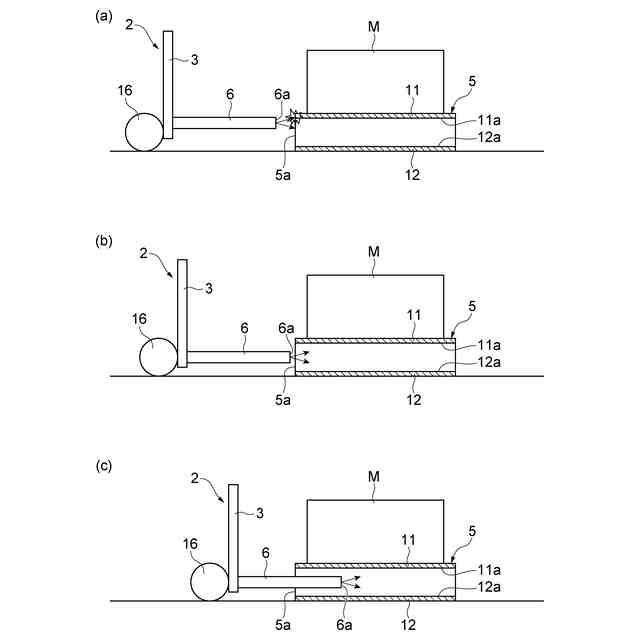
【解決手段】荷役制御装置1は、フォーク6の先端6aがパレット孔10に差し込まれる前の状態であるかどうかを判定する差込前判定部38と、フォーク6の先端6aがパレット孔10に差し込まれる前の状態であると判定された場合、フォーク6がパレット5の高さ方向の中心側に向かって昇降するようにリフトシリンダ7を制御する第1フォーク動作制御部39と、フォーク6の先端6aがパレット孔10に差し込まれた後の状態であると判定された場合、フォーク6がパレット5の上壁部11又は下壁部12の内壁面に倣う方向に傾動するようにティルトシリンダ8を制御すると共に、フォーク6がパレット5の高さ方向の中心側に向かって昇降するようにリフトシリンダ7を制御する第2フォーク動作制御部40とを備える。
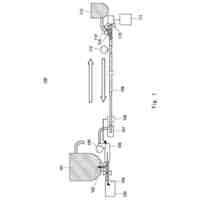
【選択図】図1
特許請求の範囲
【請求項1】
パレットを保持するフォークを昇降させるリフトシリンダと前記フォークを傾動させるティルトシリンダとを有するフォークリフトの荷役制御装置であって、
前記フォークの先端から前記パレットの前面までの距離である寄付距離を検知する寄付距離検知部と、
前記パレットのパレット孔に前記フォークを差し込むように前記フォークリフトを制御する差込制御部と、
前記差込制御部の処理を開始した後、前記寄付距離検知部により検知された前記寄付距離と前記フォークの移動距離とに基づいて、前記パレット孔に対する前記フォークの差込量を算出する差込量算出部と、
前記差込制御部の処理を開始した後、前記差込量算出部により算出された前記パレット孔に対する前記フォークの差込量に基づいて、前記フォークの先端が前記パレット孔に差し込まれる前の状態であるかどうかを判定する差込前判定部と、
前記差込制御部の処理を開始した後、前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれる前の状態であると判定された場合に、前記フォークが前記パレットの高さ方向の中心側に向かって昇降するように前記リフトシリンダを制御する第1フォーク動作制御部と、
前記差込制御部の処理を開始した後、前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれた後の状態であると判定された場合に、前記フォークが前記パレットの上壁部または下壁部の内壁面に倣う方向に傾動するように前記ティルトシリンダを制御すると共に、前記フォークが前記パレットの高さ方向の中心側に向かって昇降するように前記リフトシリンダを制御する第2フォーク動作制御部とを備えるフォークリフトの荷役制御装置。
続きを表示(約 2,200 文字)
【請求項2】
前記フォークの先端から前記パレットの上壁部までの距離が予め決められた規定値以下であるかどうかを検出するパレット上壁検出部と、
前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下であるかどうかを検出するパレット下壁検出部とを更に備え、
前記第1フォーク動作制御部は、前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれる前の状態であると判定された場合に、前記パレット上壁検出部により前記フォークの先端から前記パレットの上壁部までの距離が前記規定値以下であると検出されたときは、前記フォークが下降するように前記リフトシリンダを制御し、前記パレット下壁検出部により前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下であると検出されたときは、前記フォークが上昇するように前記リフトシリンダを制御し、
前記第2フォーク動作制御部は、前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれた後の状態であると判定された場合に、前記パレット上壁検出部により前記フォークの先端から前記パレットの上壁部までの距離が前記規定値以下であると検出されたときは、前記フォークが前傾するように前記ティルトシリンダを制御すると共に、前記フォークが上昇するように前記リフトシリンダを制御し、前記パレット下壁検出部により前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下であると検出されたときは、前記フォークが後傾するように前記ティルトシリンダを制御すると共に、前記フォークが下降するように前記リフトシリンダを制御する請求項1記載のフォークリフトの荷役制御装置。
【請求項3】
前記第1フォーク動作制御部は、前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれる前の状態であると判定された場合に、前記パレット上壁検出部により前記フォークの先端から前記パレットの上壁部までの距離が前記規定値以下であると検出されたときは、前記パレット上壁検出部により前記フォークの先端から前記パレットの上壁部までの距離が前記規定値以下でないと検出されるまで、前記フォークが一定量ずつ下降するように前記リフトシリンダを制御し、前記パレット下壁検出部により前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下であると検出されたときは、前記パレット下壁検出部により前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下でないと検出されるまで、前記フォークが一定量ずつ上昇するように前記リフトシリンダを制御し、
前記第2フォーク動作制御部は、前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれた後の状態であると判定された場合に、前記パレット上壁検出部により前記フォークの先端から前記パレットの上壁部までの距離が前記規定値以下であると検出されたときは、前記パレット上壁検出部により前記フォークの先端から前記パレットの上壁部までの距離が前記規定値以下でないと検出されるまで、前記フォークが一定量ずつ前傾するように前記ティルトシリンダを制御すると共に、前記フォークが一定量ずつ上昇するように前記リフトシリンダを制御し、前記パレット下壁検出部により前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下であると検出されたときは、前記パレット下壁検出部により前記フォークの先端から前記パレットの下壁部までの距離が前記規定値以下でないと検出されるまで、前記フォークが一定量ずつ後傾するように前記ティルトシリンダを制御すると共に、前記フォークが一定量ずつ下降するように前記リフトシリンダを制御する請求項2記載のフォークリフトの荷役制御装置。
【請求項4】
前記差込前判定部により前記フォークの先端が前記パレット孔に差し込まれる前の状態でないと判定された場合に、前記フォークが前記パレット孔に予め決められた規定量以上差し込まれた状態であるかどうかを判定する差込後判定部を更に備え、
前記第1フォーク動作制御部は、前記差込後判定部により前記フォークが前記パレット孔に前記規定量以上差し込まれた状態でないと判定された場合に、前記フォークが前記パレットの高さ方向の中心側に向かって昇降するように前記リフトシリンダを制御し、
前記第2フォーク動作制御部は、前記差込後判定部により前記フォークが前記パレット孔に前記規定量以上差し込まれた状態であると判定された場合に、前記フォークが前記パレットの上壁部または下壁部の内壁面に倣う方向に傾動するように前記ティルトシリンダを制御すると共に、前記フォークが前記パレットの高さ方向の中心側に向かって昇降するように前記リフトシリンダを制御する請求項1記載のフォークリフトの荷役制御装置。
【請求項5】
前記差込制御部は、前記フォークリフトが走行して前記パレット孔に前記フォークを差し込むように前記フォークリフトを制御し、
前記差込量算出部は、前記フォークの移動距離として前記フォークリフトの走行距離を取得し、前記寄付距離検知部により検知された前記寄付距離と前記フォークリフトの走行距離とに基づいて、前記パレット孔に対する前記フォークの差込量を算出する請求項1記載のフォークリフトの荷役制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フォークリフトの荷役制御装置に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
フォークリフトの荷役制御装置としては、例えば特許文献1に記載されている技術が知られている。特許文献1に記載の荷役制御装置は、フォークの差込部とパレットの差込孔の対向面との距離が所定値以下であるかどうかを検出するセンサと、このセンサにより差込部と差込孔の対向面との距離が所定値以下となるまで差込部が対向面に近づいたことが検出されると、移動装置を停止させる停止処理を実行した後、傾動装置及び昇降装置を制御することにより、差込孔の入口に対する差込部の高さ位置が変化しないように差込孔の対向面から差込部を離す回避処理を実行する制御装置とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2023-57735号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
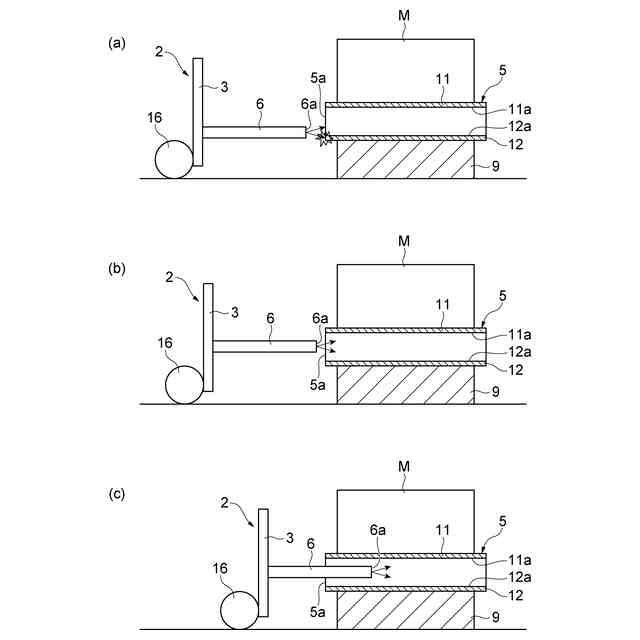
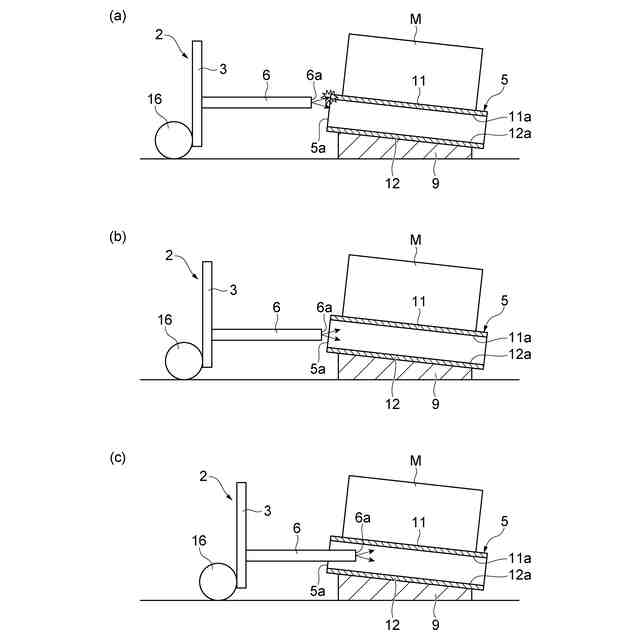
上記従来技術においては、パレットの荷取りを行う際に、パレットの差込孔(パレット孔)の入口におけるフォークの高さ位置を変化させないように、フォークの傾動(ティルト)制御によるフォークの高さ位置の変動をフォークの昇降制御により相殺している。しかし、自動運転フォークリフトにおいて、パレットを検知してパレットのパレット孔にフォークを差し込む際には、パレットの検知ばらつきやフォークの制御ばらつき等によって、パレットの高さ方向の中央部にフォークが位置せず、パレットの上壁部または下壁部の近傍にフォークが位置することがある。この場合には、パレットの傾斜が無いにも関わらず、パレットの上壁部または下壁部の内壁面に倣ったフォークの傾動制御及び昇降制御が実施され、荷取り失敗につながる可能性がある。
【0005】
本発明の目的は、パレットの傾斜の有無に関わらず、パレットのパレット孔にフォークを適切に差し込むことができるフォークリフトの荷役制御装置を提供することである。
【課題を解決するための手段】
【0006】
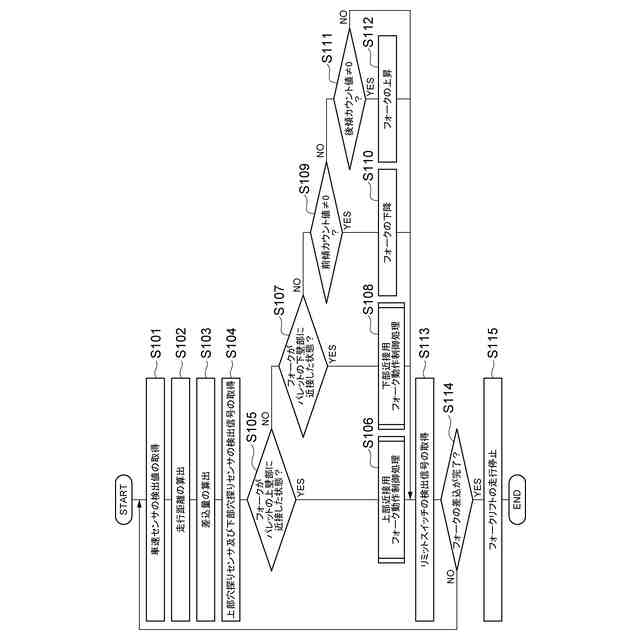
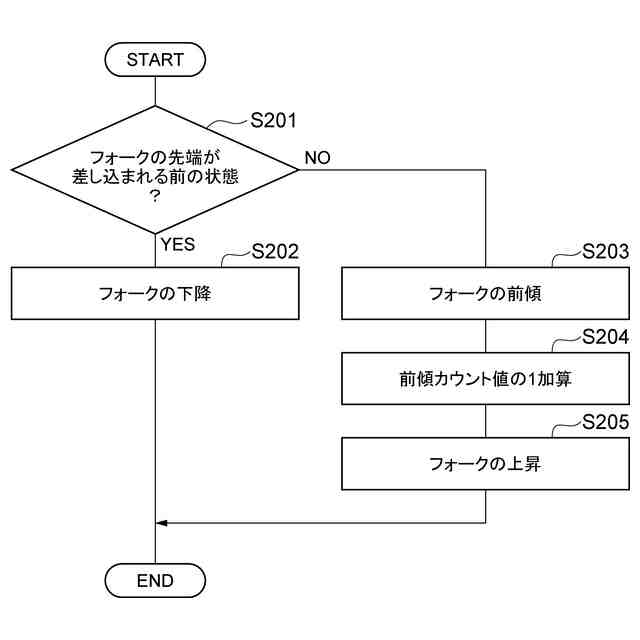
(1)本発明の一態様は、パレットを保持するフォークを昇降させるリフトシリンダとフォークを傾動させるティルトシリンダとを有するフォークリフトの荷役制御装置であって、フォークの先端からパレットの前面までの距離である寄付距離を検知する寄付距離検知部と、パレットのパレット孔にフォークを差し込むようにフォークリフトを制御する差込制御部と、差込制御部の処理を開始した後、寄付距離検知部により検知された寄付距離とフォークの移動距離とに基づいて、パレット孔に対するフォークの差込量を算出する差込量算出部と、差込制御部の処理を開始した後、差込量算出部により算出されたパレット孔に対するフォークの差込量に基づいて、フォークの先端がパレット孔に差し込まれる前の状態であるかどうかを判定する差込前判定部と、差込制御部の処理を開始した後、差込前判定部によりフォークの先端がパレット孔に差し込まれる前の状態であると判定された場合に、フォークがパレットの高さ方向の中心側に向かって昇降するようにリフトシリンダを制御する第1フォーク動作制御部と、差込制御部の処理を開始した後、差込前判定部によりフォークの先端がパレット孔に差し込まれた後の状態であると判定された場合に、フォークがパレットの上壁部または下壁部の内壁面に倣う方向に傾動するようにティルトシリンダを制御すると共に、フォークがパレットの高さ方向の中心側に向かって昇降するようにリフトシリンダを制御する第2フォーク動作制御部とを備える。
【0007】
このような荷役制御装置においては、フォークの先端からパレットの前面までの距離である寄付距離が検知された後、パレットのパレット孔にフォークを差し込むようにフォークリフトを制御する処理が開始される。そして、寄付距離とフォークの移動距離とに基づいて、パレット孔に対するフォークの差込量が算出される。そして、パレット孔に対するフォークの差込量に基づいて、フォークの先端がパレット孔に差し込まれる前の状態であるかどうかが判定される。フォークの先端がパレット孔に差し込まれる前の状態であると判定された場合は、フォークがパレットの高さ方向の中心側に向かって昇降するようにリフトシリンダが制御される。フォークの先端がパレット孔に差し込まれた後の状態であると判定された場合は、フォークがパレットの上壁部または下壁部の内壁面に倣う方向に傾動するようにティルトシリンダが制御されると共に、フォークがパレットの高さ方向の中心側に向かって昇降するようにリフトシリンダが制御される。このようにフォークの先端がパレットのパレット孔に差し込まれる前の状態である場合は、フォークがパレットの高さ方向の中心側に向かって昇降する。このため、パレットの検知ずれやフォークの制御ずれ等によって、フォークがパレットの高さ方向の中央部からずれていても、フォークの先端がパレットのパレット孔に差し込まれる前に、フォークの高さ位置がパレットの高さ方向の中心側に補正されることとなる。これにより、パレットの傾斜の有無に関わらず、パレットのパレット孔にフォークが適切に差し込まれる。
【0008】
(2)上記の(1)において、フォークリフトの荷役制御装置は、フォークの先端からパレットの上壁部までの距離が予め決められた規定値以下であるかどうかを検出するパレット上壁検出部と、フォークの先端からパレットの下壁部までの距離が規定値以下であるかどうかを検出するパレット下壁検出部とを更に備え、第1フォーク動作制御部は、差込前判定部によりフォークの先端がパレット孔に差し込まれる前の状態であると判定された場合に、パレット上壁検出部によりフォークの先端からパレットの上壁部までの距離が規定値以下であると検出されたときは、フォークが下降するようにリフトシリンダを制御し、パレット下壁検出部によりフォークの先端からパレットの下壁部までの距離が規定値以下であると検出されたときは、フォークが上昇するようにリフトシリンダを制御し、第2フォーク動作制御部は、差込前判定部によりフォークの先端がパレット孔に差し込まれた後の状態であると判定された場合に、パレット上壁検出部によりフォークの先端からパレットの上壁部までの距離が規定値以下であると検出されたときは、フォークが前傾するようにティルトシリンダを制御すると共に、フォークが上昇するようにリフトシリンダを制御し、パレット下壁検出部によりフォークの先端からパレットの下壁部までの距離が規定値以下であると検出されたときは、フォークが後傾するようにティルトシリンダを制御すると共に、フォークが下降するようにリフトシリンダを制御してもよい。
【0009】
このような構成では、フォークの先端がパレットのパレット孔に差し込まれる前の状態である場合に、フォークの先端からパレットの上壁部までの距離が規定値以下であると検出されたときは、フォークが下降する。フォークの先端がパレットのパレット孔に差し込まれる前の状態である場合に、フォークの先端からパレットの下壁部までの距離が規定値以下であると検出されたときは、フォークが上昇する。このため、フォークがパレットの高さ方向の中央部から上下の何れの方向にずれていても、フォークの高さ位置がパレットの高さ方向の中心側に補正されることとなる。従って、パレットの傾斜の有無に関わらず、パレットのパレット孔にフォークがより適切に差し込まれる。
【0010】
(3)上記の(2)において、第1フォーク動作制御部は、差込前判定部によりフォークの先端がパレット孔に差し込まれる前の状態であると判定された場合に、パレット上壁検出部によりフォークの先端からパレットの上壁部までの距離が規定値以下であると検出されたときは、パレット上壁検出部によりフォークの先端からパレットの上壁部までの距離が規定値以下でないと検出されるまで、フォークが一定量ずつ下降するようにリフトシリンダを制御し、パレット下壁検出部によりフォークの先端からパレットの下壁部までの距離が規定値以下であると検出されたときは、パレット下壁検出部によりフォークの先端からパレットの下壁部までの距離が規定値以下でないと検出されるまで、フォークが一定量ずつ上昇するようにリフトシリンダを制御し、第2フォーク動作制御部は、差込前判定部によりフォークの先端がパレット孔に差し込まれた後の状態であると判定された場合に、パレット上壁検出部によりフォークの先端からパレットの上壁部までの距離が規定値以下であると検出されたときは、パレット上壁検出部によりフォークの先端からパレットの上壁部までの距離が規定値以下でないと検出されるまで、フォークが一定量ずつ前傾するようにティルトシリンダを制御すると共に、フォークが一定量ずつ上昇するようにリフトシリンダを制御し、パレット下壁検出部によりフォークの先端からパレットの下壁部までの距離が規定値以下であると検出されたときは、パレット下壁検出部によりフォークの先端からパレットの下壁部までの距離が規定値以下でないと検出されるまで、フォークが一定量ずつ後傾するようにティルトシリンダを制御すると共に、フォークが一定量ずつ下降するようにリフトシリンダを制御してもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
圧縮機
3日前
株式会社豊田自動織機
圧縮機
3日前
株式会社豊田自動織機
圧縮機
3日前
株式会社豊田自動織機
電動圧縮機
24日前
株式会社豊田自動織機
電動圧縮機
2日前
株式会社豊田自動織機
仕分け装置
18日前
株式会社豊田自動織機
電動圧縮機
19日前
株式会社豊田自動織機
電動圧縮機
18日前
株式会社豊田自動織機
電動圧縮機
25日前
株式会社豊田自動織機
倉庫システム
19日前
株式会社豊田自動織機
制御システム
24日前
株式会社豊田自動織機
倉庫システム
20日前
株式会社豊田自動織機
排気浄化装置
3日前
株式会社豊田自動織機
フォークリフト
20日前
株式会社豊田自動織機
フォークリフト
3日前
株式会社豊田自動織機
蓄電モジュール
25日前
株式会社豊田自動織機
燃料電池用ポンプ
19日前
株式会社豊田自動織機
エアジェット織機
24日前
株式会社豊田自動織機
電子部品ユニット
25日前
株式会社豊田自動織機
電子部品ユニット
25日前
株式会社豊田自動織機
燃料電池モジュール
10日前
株式会社豊田自動織機
スクロール型圧縮機
25日前
株式会社豊田自動織機
燃料電池モジュール
2日前
株式会社豊田自動織機
機能構造体の製造方法
25日前
株式会社豊田自動織機
産業車両及び画像投影方法
20日前
株式会社豊田自動織機
車両用スライドデッキ装置
19日前
株式会社豊田自動織機
サイドシフトフォークリフト
24日前
株式会社豊田自動織機
電力変換器及び電流検出回路
25日前
株式会社豊田自動織機
燃料電池ユニット及び産業車両
2日前
株式会社豊田自動織機
燃料電池システム及び産業車両
11日前
株式会社豊田自動織機
容量表示方法及び容量表示装置
24日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
5日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
5日前
株式会社豊田自動織機
制御装置、及びパレットロック装置
18日前
トヨタ自動車株式会社
配管洗浄装置
4日前
トヨタ自動車株式会社
電池の封止方法
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ