TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110279
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024004120
出願日
2024-01-15
発明の名称
施工支援システム、施工支援方法及び施工支援プログラム
出願人
株式会社大林組
代理人
個人
,
個人
主分類
E02F
9/22 20060101AFI20250718BHJP(水工;基礎;土砂の移送)
要約
【課題】無人機と有人機との併用を的確に管理する。
【解決手段】施工支援システムA1は、制御部21、施工計画記憶部22及び作業状況記憶部24を備える。制御部21は、有人運転モードの建設機械40及び自動運転モードの建設機械40と通信を行なう。制御部21は、自動運転モードの建設機械の作業状況情報を取得し、作業状況情報に基づいて作業効率を算出し、作業状況情報が異常であるか否かを判定し、作業状況情報が異常であると判定した場合、有人運転モードの建設機械の挙動情報を出力する。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータが、
自動運転モードの建設機械の作業状況情報を取得し、
前記作業状況情報が異常であるか否かを判定し、
前記作業状況情報が異常であると判定した場合、有人運転モードの建設機械の挙動情報を出力することを特徴とする施工支援システム。
続きを表示(約 300 文字)
【請求項2】
コンピュータが、
自動運転モードの建設機械の作業状況情報を取得し、
前記作業状況情報が異常であるか否かを判定し、
前記作業状況情報が異常であると判定した場合、有人運転モードの建設機械の挙動情報を出力することを特徴とする施工支援方法。
【請求項3】
コンピュータを、
自動運転モードの建設機械の作業状況情報を取得し、
前記作業状況情報が異常であるか否かを判定し、
前記作業状況情報が異常であると判定した場合、有人運転モードの建設機械の挙動情報を出力する手段として機能させることを特徴とする施工支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、複数の建設機械によって施工を行なう施工支援システム、施工支援方法及び施工支援プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
建設工事の施工等において、多くの建設機械が利用される。このため、建設機械を管理するための施工管理システムが検討されている(例えば、特許文献1参照。)。この特許文献1に開示された施工管理システムは、施工現場において自律運転により作業を行なう複数の建設機械と、オペレータが操作可能な管理装置と、複数の建設機械と管理装置とが通信可能に接続されたプラットフォームと、を備える。各建設機械は、取得した自己位置をプラットフォームに送信する。管理装置は、複数の建設機械についての安全優先順位をプラットフォームに送信する。プラットフォームは、各建設機械の作業中、各建設機械の自己位置と安全優先順位とに基づいて各建設機械について緊急停止の要否を判断する。
【先行技術文献】
【特許文献】
【0003】
特開2023-061093号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特に、大規模な工事現場では、多くの建設機械を利用する必要がある。この場合、現場状況や施工内容は多様であるため、すべての建設機械を無人機による自律運転により施工を行なうことは困難である。このため、一つの工事現場において、自律運転による無人機と、オペレータが操作する有人機とを併用することになる。ここで、無人機と有人機との併用を的確に管理しなければ、効率的な施工を実現できない。
【課題を解決するための手段】
【0005】
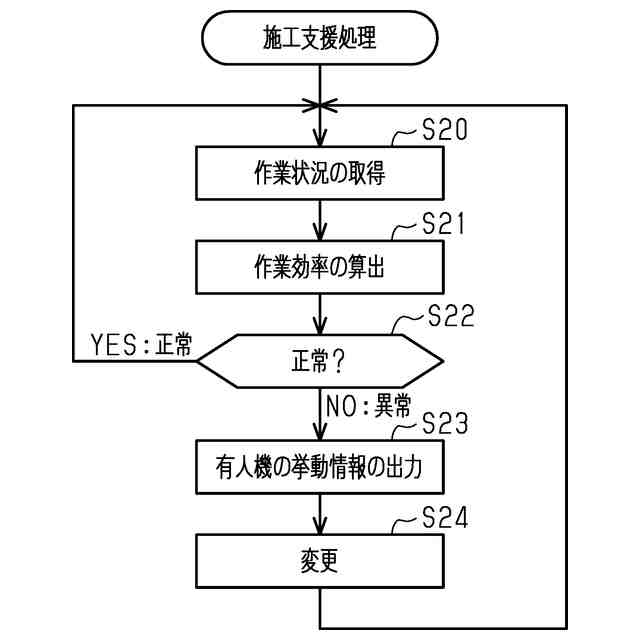
上記課題を解決する施工支援システムは、コンピュータが、自動運転モードの建設機械の作業状況情報を取得し、前記作業状況情報が異常であるか否かを判定し、前記作業状況情報が異常であると判定した場合、有人運転モードの建設機械の挙動情報を出力する。
【発明の効果】
【0006】
本発明によれば、無人機と有人機との併用を的確に管理することができる。
【図面の簡単な説明】
【0007】
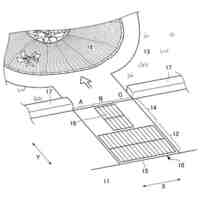
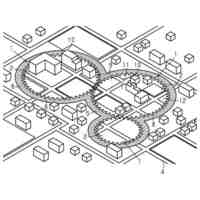
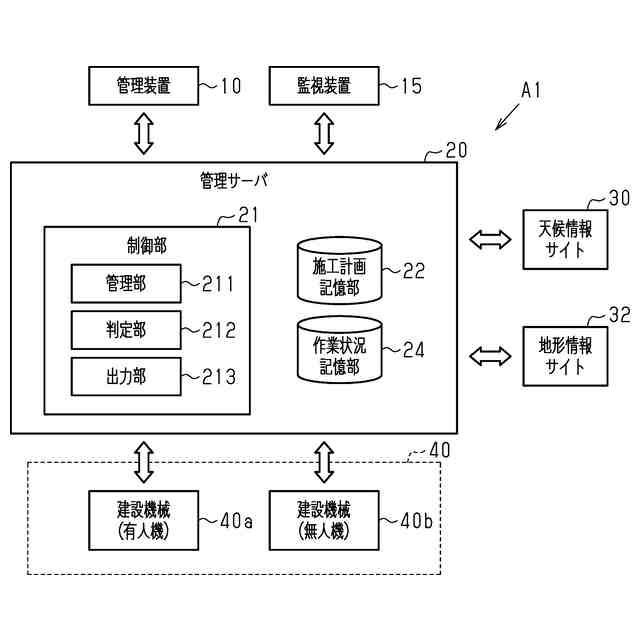
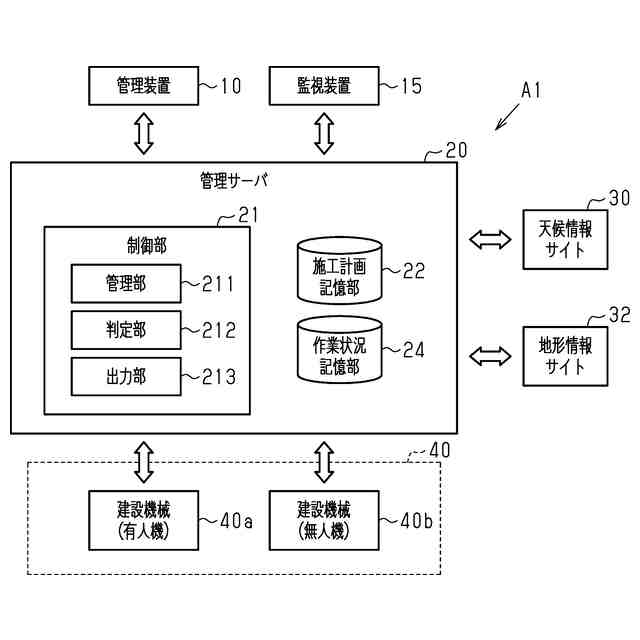
実施形態のシステムの説明図である。
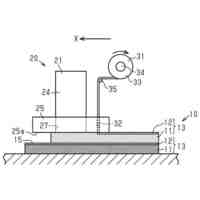
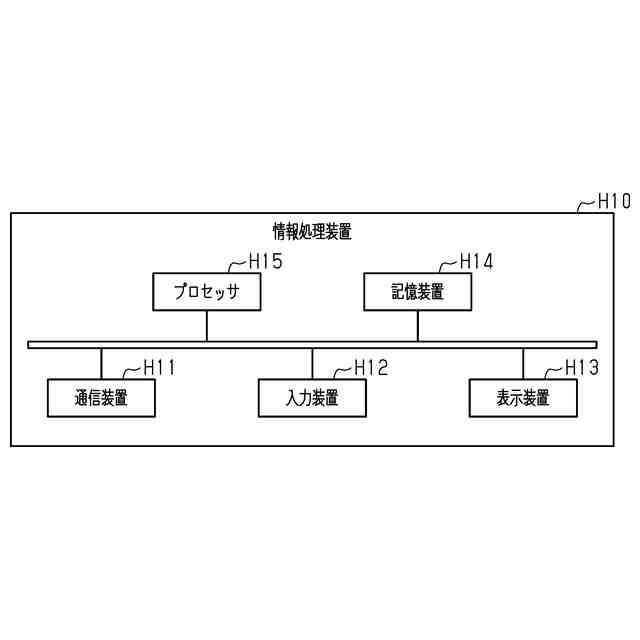
実施形態のハードウェア構成の説明図である。
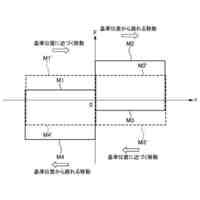
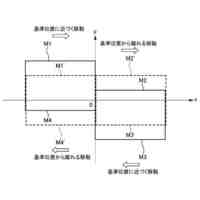
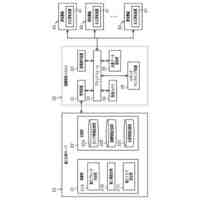
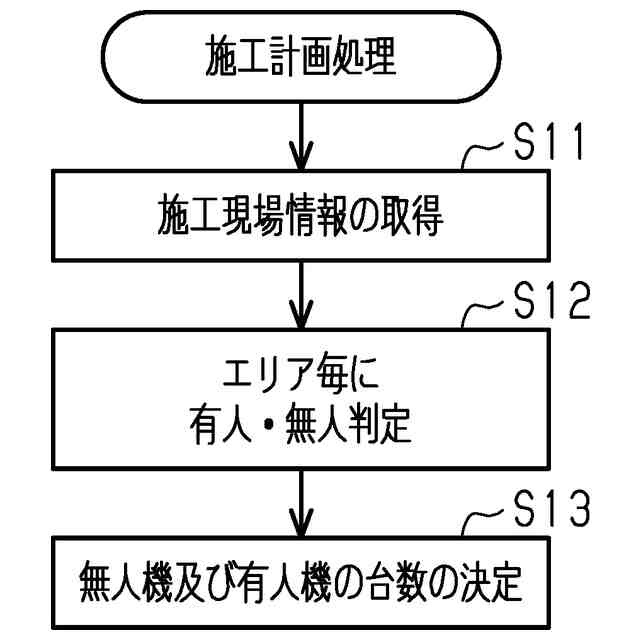
実施形態の処理手順の説明図である。
実施形態の処理手順の説明図である。
【発明を実施するための形態】
【0008】
以下、図1~図4に従って、施工支援システム、施工支援方法及び施工支援プログラムを具体化した一実施形態を説明する。本実施形態では、建設工事の工事現場で利用する建設機械の管理に用いる施工支援システムとして説明する。
【0009】
図1に示すように、施工支援システムA1は、管理サーバ20を備える。管理サーバ20は、管理装置10、監視装置15、天候情報サイト30、地形情報サイト32、及び建設機械40とネットワークで相互に接続されている。建設機械40には、有人機40a、無人機40bが含まれる。
【0010】
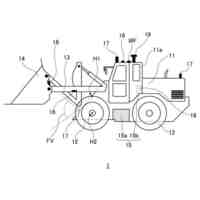
有人機40aは、工事現場で、建設機械40に搭乗したオペレータが操作を行なう建設機械40である。
無人機40bは、工事現場においてオペレータが操作を行なわない建設機械40である。この無人機40bは、位置情報の取得、周囲環境の認識等のセンシングにより、指示された施工内容を実行する自律運転を行なう。なお、この無人機40bには、隔地でオペレータが操作を行なう場合も含まれてもよい。建設機械40は、有人運転のみに対応するもの、無人運転のみに対応するもの、又は運転モードを変更することにより有人機40a及び無人機40bの両方に対応可能であるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建物
1か月前
株式会社大林組
建物
1か月前
株式会社大林組
加泥材
13日前
株式会社大林組
制震構造
1か月前
株式会社大林組
減衰装置
21日前
株式会社大林組
減衰装置
21日前
株式会社大林組
雨水桝蓋
1か月前
株式会社大林組
作業機械
2か月前
株式会社大林組
施工方法
2か月前
株式会社大林組
施工方法
2か月前
株式会社大林組
接続構造
14日前
株式会社大林組
免震構造物
2か月前
株式会社大林組
ブラインド
2か月前
株式会社大林組
流出防止治具
2か月前
株式会社大林組
屋根構築方法
1か月前
株式会社大林組
免震建物構造
1か月前
株式会社大林組
耐火被覆構造
12日前
株式会社大林組
土壌改良方法
12日前
株式会社大林組
摩擦ダンパー
1か月前
株式会社大林組
耐火被覆構造
12日前
株式会社大林組
人工地盤構造
2か月前
株式会社大林組
摩擦ダンパー
1か月前
株式会社大林組
シャッター装置
8日前
株式会社大林組
積層材成型方法
6日前
株式会社大林組
物体の設置方法
2か月前
株式会社大林組
粉塵飛散抑制剤
1か月前
株式会社大林組
地震損失評価方法
9日前
株式会社大林組
施工管理システム
2か月前
株式会社大林組
構造体の製造方法
2か月前
株式会社大林組
構造体の製造方法
2か月前
株式会社大林組
構造体の製造方法
2か月前
株式会社大林組
耐セメント安定液
2か月前
株式会社大林組
建築方法及び建築物
6日前
株式会社大林組
改良土の品質管理方法
今日
株式会社大林組
自硬性材料の製造方法
1か月前
株式会社大林組
山留め工事の支援方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ