TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110420
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2025084003,2023084595
出願日
2025-05-20,2023-05-23
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250718BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
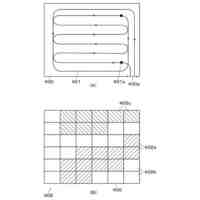
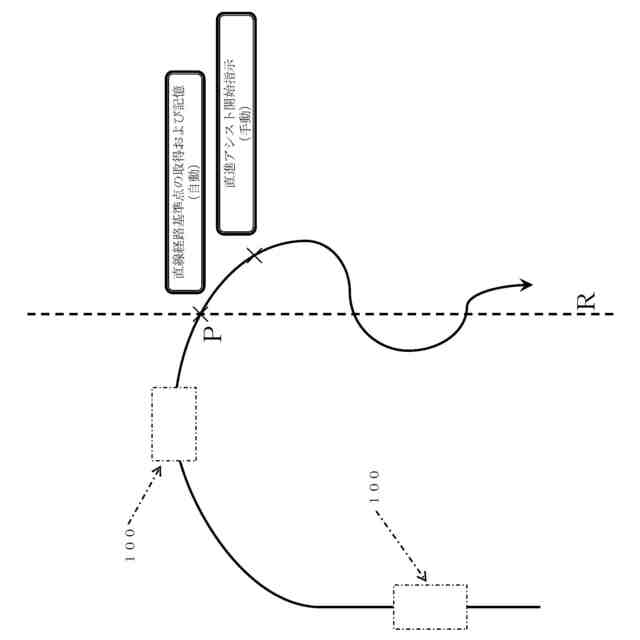
【課題】 直進アシストが終了して車体がつぎの直進アシストのために移動させられているとき、直線経路基準点を適切に取得することが容易でないことに本発明者は気付いた。
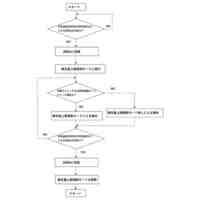
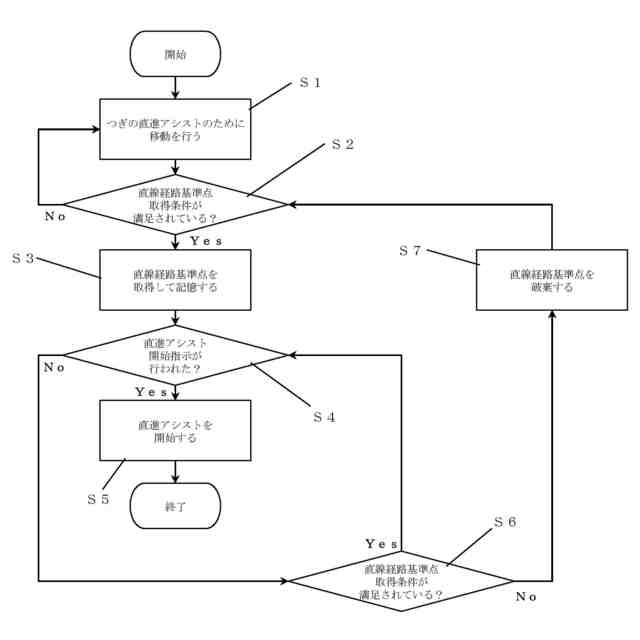
【解決手段】 車体を直線経路に沿って直進させるための直進アシストを行うコントローラーと、コントローラーへの直進アシスト開始指示をユーザーの手動操作に応じて行う直進アシスト開始指示部材と、を備えており、直進アシストが終了して車体がつぎの直進アシストのために移動させられているとき、コントローラーは、直線経路基準点取得条件が満足されているか否かを繰返し判断し、直線経路基準点取得条件が満足されていると判断した時点で、車体の位置を直線経路基準点として取得するとともに直線経路基準点を記憶し、直線経路基準点を記憶した後、開始指示部材により直進アシスト開始指示が行われた場合は、直進アシストを開始できる。
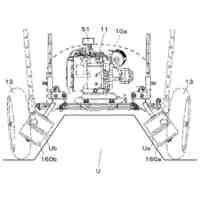
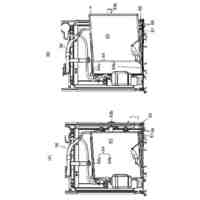
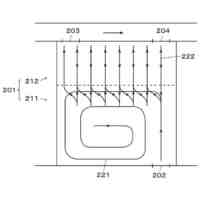
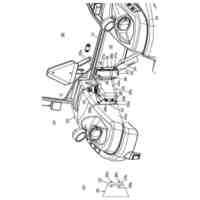
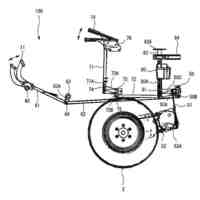
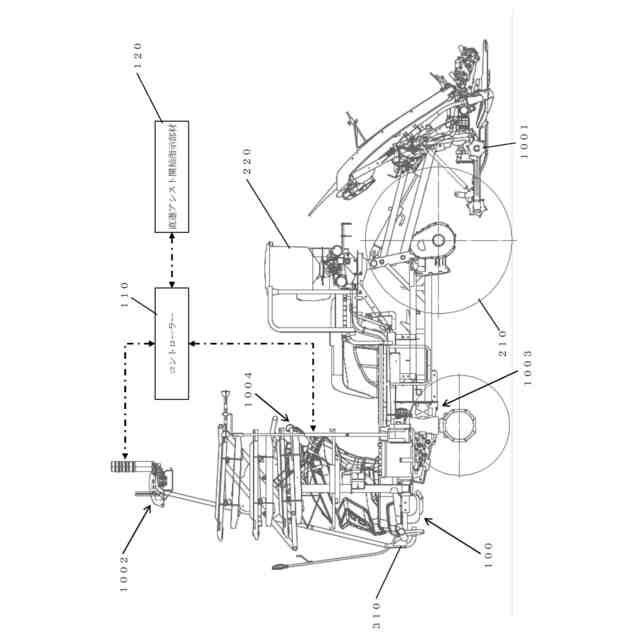
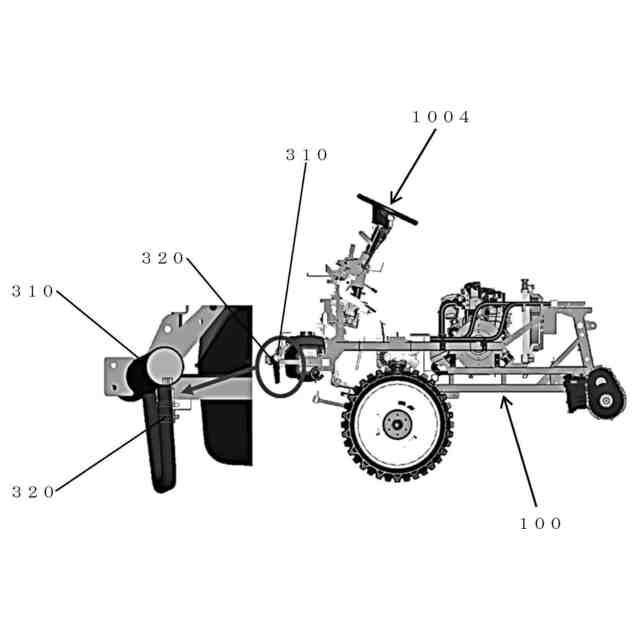
【選択図】 図1
特許請求の範囲
【請求項1】
直線経路に沿って走行する作業車両であって、
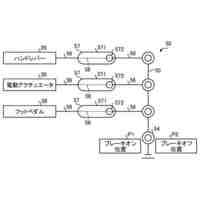
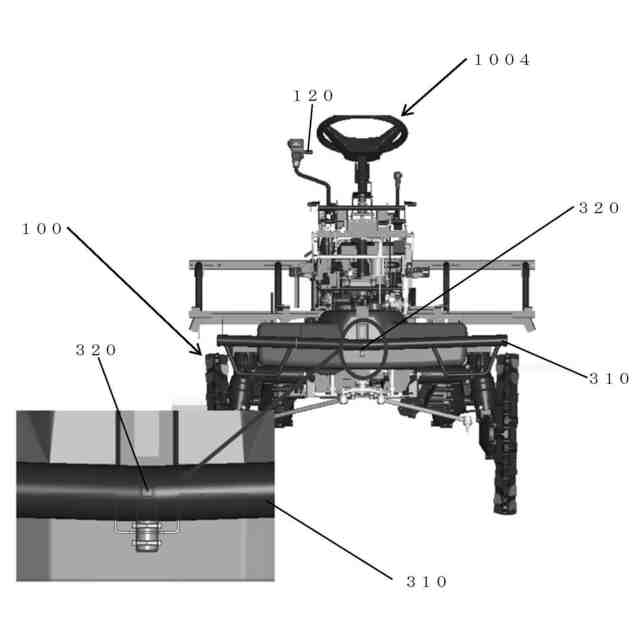
車体(100)を前記直線経路に沿って直進させるための直進アシストを行うコントローラー(110)と、
前記コントローラー(110)への直進アシスト開始指示をユーザーの手動操作に応じて行う直進アシスト開始指示部材(120)と、
を備えており、
前記直進アシストが終了して前記車体(100)がつぎの前記直進アシストのために移動させられているとき、前記コントローラー(110)は、直線経路基準点取得条件が満足されているか否かを繰返し判断し、前記直線経路基準点取得条件が満足されていると判断した時点で、前記車体(100)の位置を直線経路基準点として取得するとともに前記直線経路基準点を記憶し、前記直線経路基準点を記憶した後、前記開始指示部材(120)により前記直進アシスト開始指示が行われた場合は、前記直進アシストを開始できることを特徴とする作業車両。
続きを表示(約 390 文字)
【請求項2】
前記コントローラー(110)は、前記直線経路基準点を記憶した後も、前記直線経路基準点取得条件が満足されているか否かを判断し続け、前記直進アシスト開始指示が行われないままに、前記直線経路基準点取得条件が満足されなくなったと判断した場合は、前記記憶されている直線経路基準点を破棄することを特徴とする請求項1に記載の作業車両。
【請求項3】
前記コントローラー(110)は、前記直線経路基準点を破棄した後、直線経路基準点再取得条件が満足されていると判断する時点まで、前記直線経路基準点を再び取得しない、
前記直線経路基準点再取得条件は、操舵角度に関する条件とし、前記操舵角度が前記車体(100)を直進させるステアリング位置と対応するおよその角度であり、前記およその角度が安定的に一致していることを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植え機のような作業車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
GPS装置と、ティーチング経路生成手段を備え、GPS装置により計測される位置情報に基づいて、ティーチング経路生成手段によりティーチング経路を生成し、さらに、ティーチング経路生成手段によりティーチング経路に対して平行な目標経路を生成し、目標経路上を自律的に走行する農用作業車において、オペレータにより、自動旋回操作具が操作されることにより、次の目標経路へ向けて自動的に旋回し、かつ、旋回動作の終了後に引き続き、次の目標経路上を自律的に走行する農用作業車のような作業車両が、知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-092818号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、作業車両ユーザーのさまざまなニーズを考慮し、便利な機能が田植え機のような作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
より具体的には、たとえば、直進アシストが終了して車体がつぎの直進アシストのために移動させられているとき、直線経路基準点を適切に取得することが容易でないことに本発明者は気付いた。
【0007】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、直線経路に沿って走行する作業車両であって、
車体(100)を前記直線経路に沿って直進させるための直進アシストを行うコントローラー(110)と、
前記コントローラー(110)への直進アシスト開始指示をユーザーの手動操作に応じて行う直進アシスト開始指示部材(120)と、
を備えており、
前記直進アシストが終了して前記車体(100)がつぎの前記直進アシストのために移動させられているとき、前記コントローラー(110)は、直線経路基準点取得条件が満足されているか否かを繰返し判断し、前記直線経路基準点取得条件が満足されていると判断した時点で、前記車体(100)の位置を直線経路基準点として取得するとともに前記直線経路基準点を記憶し、前記直線経路基準点を記憶した後、前記開始指示部材(120)により前記直進アシスト開始指示が行われた場合は、前記直進アシストを開始できることを特徴とする作業車両である。
【0009】
第2の本発明は、前記コントローラー(110)は、前記直線経路基準点を記憶した後も、前記直線経路基準点取得条件が満足されているか否かを判断し続け、前記直進アシスト開始指示が行われないままに、前記直線経路基準点取得条件が満足されなくなったと判断した場合は、前記記憶されている直線経路基準点を破棄することを特徴とする第1の本発明の作業車両である。
【0010】
第3の本発明は、前記コントローラー(110)は、前記直線経路基準点を破棄した後、直線経路基準点再取得条件が満足されていると判断する時点まで、前記直線経路基準点を再び取得しない、
前記直線経路基準点再取得条件は、操舵角度に関する条件とし、前記操舵角度が前記車体(100)を直進させるステアリング位置と対応するおよその角度であり、前記およその角度が安定的に一致していることを特徴とする第1または2の本発明の作業車両である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
1か月前
井関農機株式会社
田植機
1日前
井関農機株式会社
移植機
28日前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
調製設備
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
7日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
乗用草刈機
1か月前
井関農機株式会社
コンバイン
2日前
井関農機株式会社
籾摺選別機
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ