TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117484
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024012357
出願日
2024-01-30
発明の名称
保持システム、及び剥離部材
出願人
コネクテッドロボティクス株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250804BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドエフェクタに付着した対象物を、より適切に剥離する。
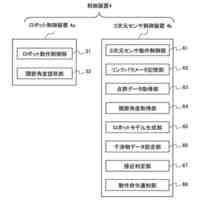
【解決手段】保持システム1は、板状の把持部材31Aを複数有するハンドユニット31、及びスクレーパー201,401,501,502,801,901を備えた多関節ロボット30と、多関節ロボット30の動作を制御する制御装置40と、を備える。制御装置40は、複数の把持部材31Aが、それぞれの少なくとも一部分を当接させることで具材を保持する保持動作、を実行させる。制御装置40は、スクレーパー201,401,501,502,801,901が、把持部材31Aがそれぞれの少なくとも一部分を当接させていない状態のときに、把持部材31Aを摺動することで、把持部材31Aに付着した具材を剥離する剥離動作、を実行させる。
【選択図】図6
特許請求の範囲
【請求項1】
板状の保持部材を複数有するエンドエフェクタ、及び剥離部材を備えたロボットと、前記ロボットの動作を制御する制御装置と、を備えた保持システムであって、
前記制御装置は、
前記複数の保持部材が、それぞれの少なくとも一部分を当接させることで対象物を保持する保持動作と、
前記剥離部材が、前記保持部材がそれぞれの少なくとも一部分を当接させていない状態のときに、前記保持部材を摺動することで、前記保持部材に付着した前記対象物を剥離する剥離動作と、
を前記ロボットに実行させることを特徴とする保持システム。
続きを表示(約 1,300 文字)
【請求項2】
前記複数の保持部材は、それぞれの縁部を当接させることで容器形状を形成し、該容器形状で前記対象物を把持することで前記保持動作を行い、
前記剥離部材は、前記容器形状が開口した状態で、該開口した部分から前記剥離した対象物を落下させることで前記剥離動作を行う、
ことを特徴とする請求項1に記載の保持システム。
【請求項3】
前記剥離部材は、前記保持動作において容器形状を形成した場合に内面となる面を少なくとも前記剥離動作の対象とし、少なくとも前記内面となる面を摺動することで前記剥離動作を行う、
ことを特徴とする請求項2に記載の保持システム。
【請求項4】
前記剥離部材は、前記保持部材の複数の面を前記剥離動作の対象とし、前記複数の面を同時に摺動することで前記剥離動作を行う、
ことを特徴とする請求項1乃至3の何れか1項に記載の保持システム。
【請求項5】
前記制御装置は、
前記保持部材を複数有するエンドエフェクタ自体を移動させることで、前記保持部材に付着した前記対象物の剥離を補助する補助剥離動作を、さらに前記ロボットに実行させる、
ことを特徴とする請求項1乃至3の何れか1項に記載の保持システム。
【請求項6】
前記保持部材は、前記保持動作を行う際に前記対象物に向かう方向に延在するよう構成されており、
前記剥離部材は、前記対象物に向かう方向に平行な方向に沿って、前記保持部材に対して相対的に移動することで、前記剥離動作を行う、
ことを特徴とする請求項1乃至3の何れか1項に記載の保持システム。
【請求項7】
前記保持部材は、保持の対象とする前記対象物が収容されている容器、又は、保持している対象物の解放先とする容器に対して前記剥離した対象物が落下するように、前記剥離動作を行う、
ことを特徴とする請求項1乃至3の何れか1項に記載の保持システム。
【請求項8】
前記複数の剥離部材は、
第1方向と、前記第1方向とは逆の第2方向とに往復移動することで、前記剥離動作を行い、
前記第1方向に移動する際と、前記第2方向に移動する際の何れにおいても保持部材に付着した前記対象物を剥離させる、
ことを特徴とする請求項1乃至3の何れか1項に記載の保持システム。
【請求項9】
板状の保持部材を複数有するエンドエフェクタ、及び剥離部材を備えたロボットと、前記ロボットの動作を制御する制御装置と、を備えた保持システムにおける剥離部材であって、
前記制御装置が、前記複数の保持部材に、それぞれの少なくとも一部分を当接させることで対象物を保持する保持動作を行う場合に、
当該剥離部材は、前記保持部材がそれぞれの少なくとも一部分を当接させていない状態のときに、前記保持部材を摺動することで、前記保持部材に付着した前記対象物を剥離する、
ことを特徴とする剥離部材。
発明の詳細な説明
【技術分野】
【0001】
本発明は、保持システム、及び剥離部材に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
近年、様々な分野において、ロボットの導入が進められている。従来からロボットが用いられている工業製品の製造分野はもちろんのことながら、例えば、食品の盛り付けを行う分野等でもロボットの導入が進められている。
また、このような盛り付けを行うロボットに関する技術の一例が、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6645774号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1等に開示の技術のように、ロボットにより何らかの対象物を保持するシステムでは、保持を実行するためのエンドエフェクタを対象物に接触させることで保持が実現される。このように、エンドエフェクタを対象物に接触させる場合、対象物の性質によっては、対象物がエンドエフェクタに付着することがある。
【0005】
これに対し、特許文献1に記載された技術では、把持部材(指リンク)に沿って移動する押出板を備え、押出板を指リンクに沿って直動駆動させることで、把持部材に付着した対象物を解放することとしている。
しかしながら、特許文献1に開示の技術も含めた従来の技術では、エンドエフェクタに付着した対象物を剥離するという観点において、未だ改善の余地があると考えられる。例えば、従来の技術では、板状の構成部材からなるエンドエフェクタを用いる場合に、どのようにして剥離を行うべきか明らかでなかった。また、このような課題は、ロボットにより様々な対象物を保持する場合において共通するものである。
【0006】
本発明の課題は、エンドエフェクタに付着した対象物を、より適切に剥離することである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一実施形態に係る保持システムは、
板状の保持部材を複数有するエンドエフェクタ、及び剥離部材を備えたロボットと、前記ロボットの動作を制御する制御装置と、を備えた保持システムであって、
前記制御装置は、
前記複数の保持部材が、それぞれの少なくとも一部分を当接させることで対象物を保持する保持動作と、
前記剥離部材が、前記保持部材がそれぞれの少なくとも一部分を当接させていない状態のときに、前記保持部材を摺動することで、前記保持部材に付着した前記対象物を剥離する剥離動作と、
を前記ロボットに実行させることを特徴とする。
【発明の効果】
【0008】
本発明によれば、エンドエフェクタに付着した対象物を、より適切に剥離することができる。
【図面の簡単な説明】
【0009】
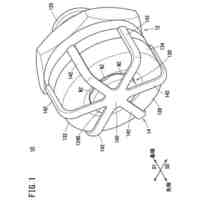
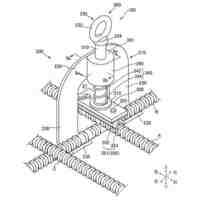
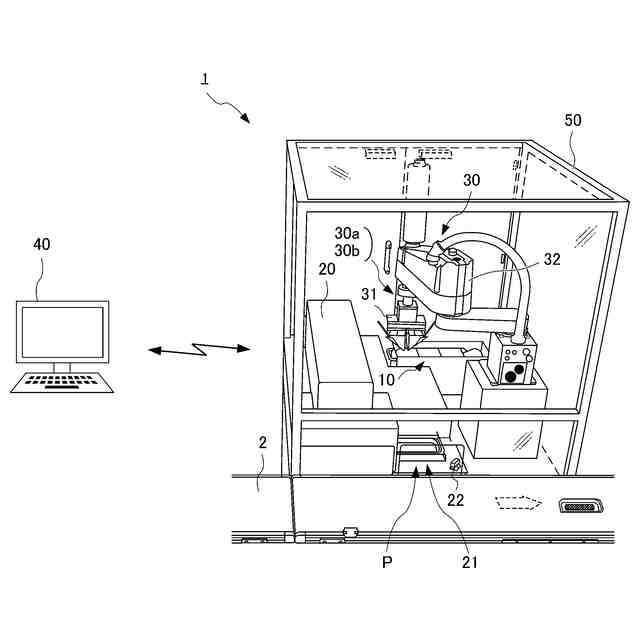
本発明に係る保持システム1が複数並べられた状態を示す斜視図である。
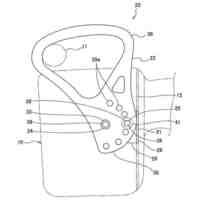
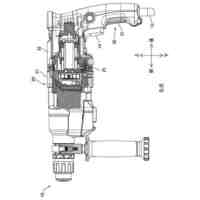
本発明に係る保持システム1の主要部を拡大した斜視図である。
実施形態1におけるハンドユニット31の構成を示す模式図(正面図)である。
実施形態1におけるハンドユニット31の構成を示す模式図(斜視図)である。
2つの把持部材31Aの開閉について示す図である。
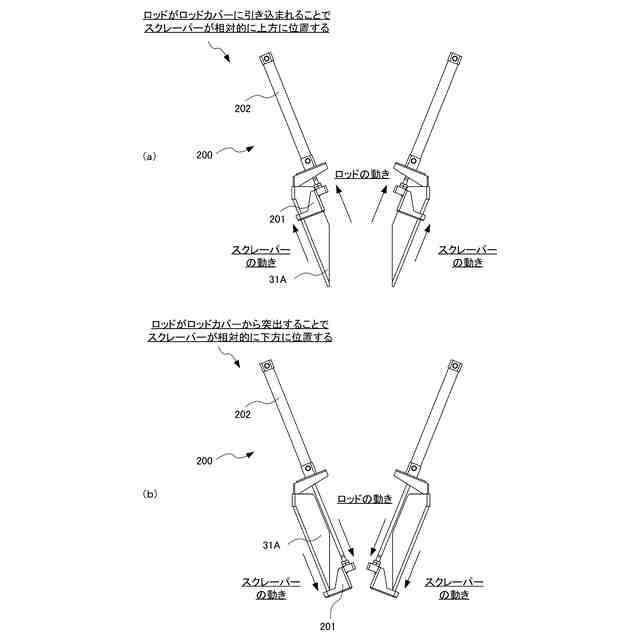
スクレーパー201と、エアシリンダ202により、把持部材31Aに付着した具材を剥離する際の剥離動作について示す図である。
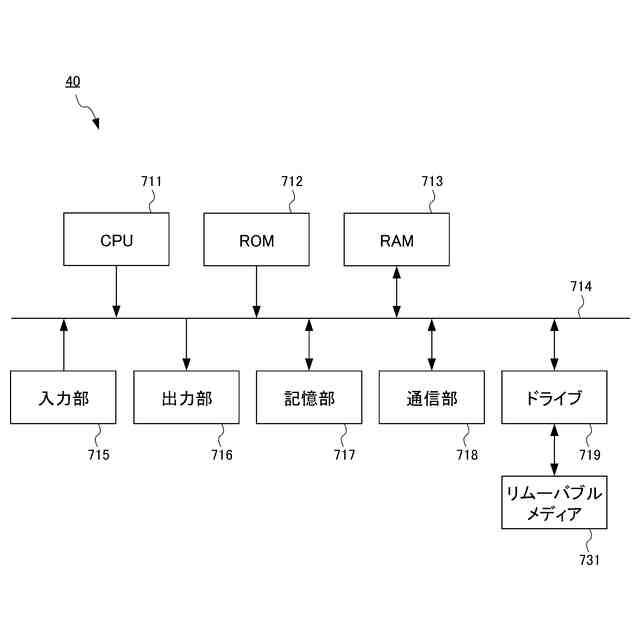
制御装置40のハードウェア構成を示す模式図である。
制御装置40の機能的構成を示すブロック図である。
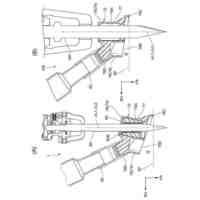
多関節ロボット30による解放動作の各動作の一例を示す模式図である
多関節ロボット30による解放動作の各動作の一例を示す模式図である
多関節ロボット30による解放動作の各動作の一例を示す模式図である
多関節ロボット30による解放動作の各動作の一例を示す模式図である
多関節ロボット30による解放動作の各動作の一例を示す模式図である
保持システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
実施形態2におけるハンドユニット31の構成を示す模式図(正面図)である。
実施形態2におけるハンドユニット31の構成を示す模式図(斜視図)である。
スクレーパー401と、棒部材402と、支持部450と、エアシリンダ460により、把持部材31Aに付着した具材を剥離する際の剥離動作について示す図である。
実施形態3におけるハンドユニット31の構成を示す模式図(斜視図)である。
実施形態3におけるハンドユニット31の構成を示す模式図(背面図)である。
変形例1において、スクレーパー801と、エアシリンダ802により、把持部材31Aに付着した具材を剥離する際の剥離動作について示す図である。
変形例2において、スクレーパー901により、把持部材31Aに付着した具材を剥離する際の剥離動作について示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。
[実施形態1]
[構成]
図1及び図2は、本発明に係る保持システム1全体の構成を示す模式図であり、図1は、保持システム1が複数並べられた状態を示す斜視図、図2は、保持システム1の主要部を拡大した斜視図である。
本実施形態における保持システム1は、食材を盛り付ける作業を行うシステムに本発明を適用することを想定したものである。そのため、以下の説明においては、保持システム1が、惣菜等の具材を把持し、この把持した具材を、惣菜の容器に盛り付けるという作業を実行する場合を例に挙げて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
カプラ接続治具
1日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
1か月前
アピュアン株式会社
衝撃工具
1か月前
オークラ輸送機株式会社
ハンド装置
2か月前
積水ハウス株式会社
フィルム除去具
13日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
18日前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社不二越
ロボットシステム
7日前
株式会社清水製作所
電動工具の吊下げ具
22日前
コネクテッドロボティクス株式会社
保持システム
15日前
セイコーエプソン株式会社
ロボット
1か月前
北越メタル株式会社
鉄筋保持具
18日前
株式会社マキタ
打撃工具
18日前
タイガー産業株式会社
アタッチメント
5日前
株式会社マキタ
電動工具
2か月前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
株式会社マキタ
回転工具
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ