TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088341
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202996
出願日
2023-11-30
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
主分類
B25F
5/00 20060101AFI20250604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業性の低下を抑制する。
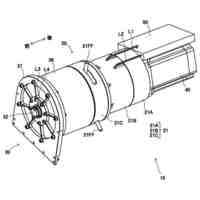
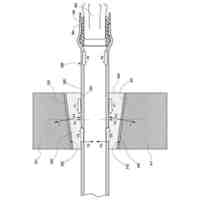
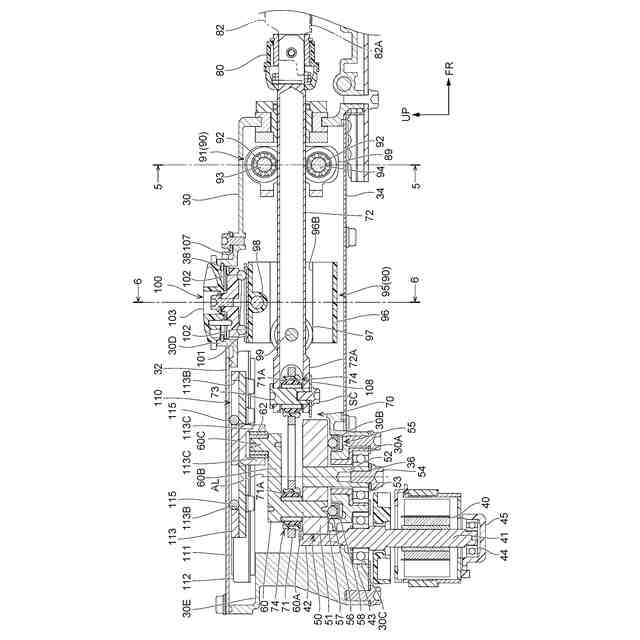
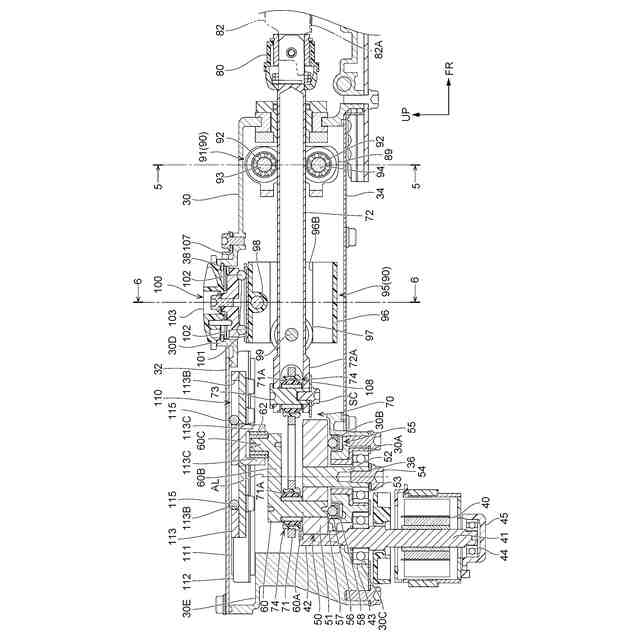
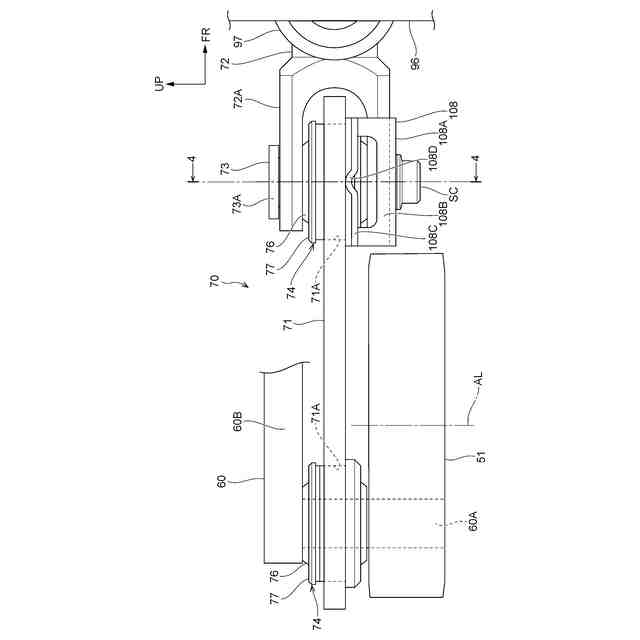
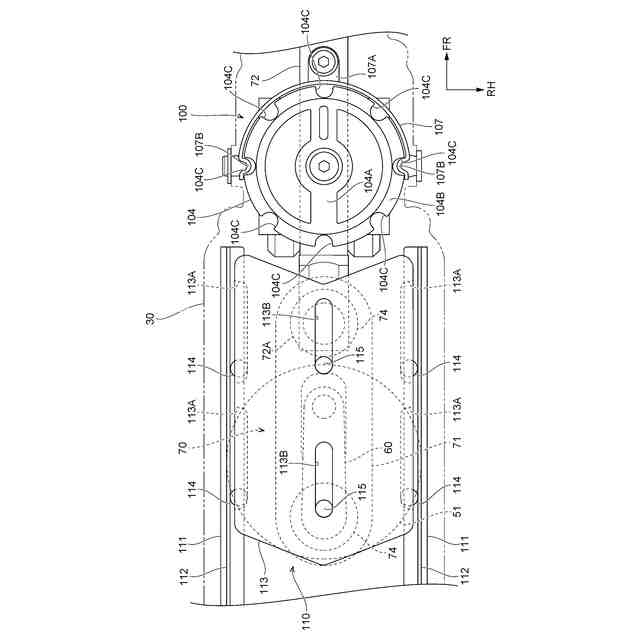
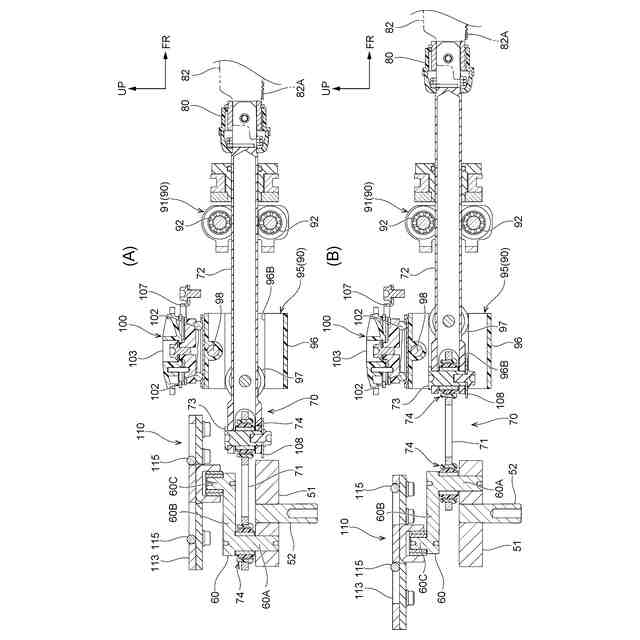
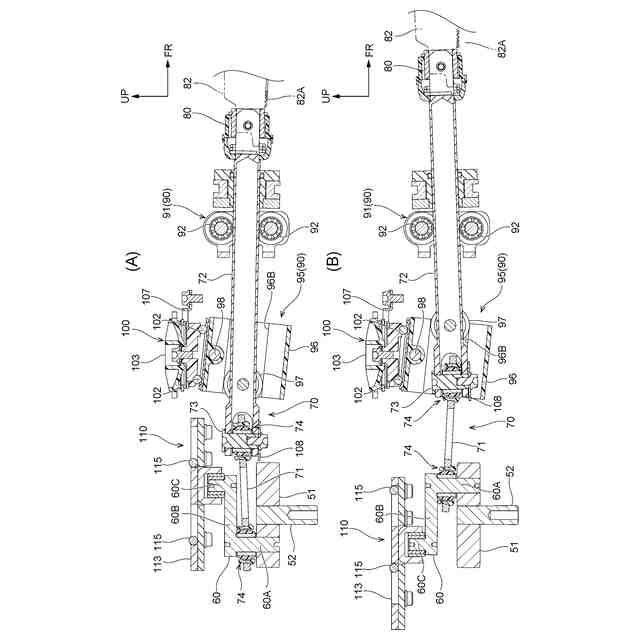
【解決手段】電動切断機10の往復動機構70では、ジョイント部74が、第1偏心軸部60Aとコネクティングロッド71とを連結すると共に、コネクティングロッド71とプランジャ72とを連結している。また、ジョイント部74は、コネクティングロッド71を第1偏心軸部60A及びプランジャ72に、上下方向を軸方向として回転可能に連結すると共に、左右方向を軸方向として回転可能にガイドする。これにより、仮に、左右方向を軸方向とする回転力がジョイント部74に入力された場合には、ジョイント部74によって、コネクティングロッド71を第1偏心軸部60A及びプランジャ72に対して相対回転させることができる。その結果、往復動機構70の破損等を抑制することができる。したがって、電動切断機10の作業性の低下を抑制できる。
【選択図】図2
特許請求の範囲
【請求項1】
モータと、
前記モータの駆動によって所定方向に延在された軸線を中心に偏心回転する偏心部と、
前記偏心部の回転運動を往復運動に変換する変換機構と、
を備え、
前記変換機構は、
前記偏心部に連結されたコネクティングロッドと、
前記コネクティングロッドに連結され、前記所定方向に交差する第1交差方向に往復移動する往復移動部と、
前記往復移動部の往復移動中において、前記往復移動部の一端を前記所定方向に変位されるため前記第1交差方向に対して傾斜したガイド面を含むスイング機構と、
ジョイント部と、
を含んで構成され、
前記ジョイント部は、前記コネクティングロッドを前記偏心部及び前記往復移動部の少なくとも一方に、前記所定方向を軸方向として回転可能に連結すると共に、前記所定方向及び前記第1交差方向に交差する第2交差方向を軸方向として回転可能にガイドする球面滑り軸受構造を有する作業機。
続きを表示(約 1,900 文字)
【請求項2】
モータと、
前記モータの駆動によって所定方向に延在された軸線を中心に偏心回転する偏心部と、
前記偏心部の回転運動を往復運動に変換する変換機構と、
を備え、
前記変換機構は、
前記偏心部に連結されたコネクティングロッドと、
前記コネクティングロッドに連結され、前記所定方向に交差する第1交差方向に延在するとともに、前記第1交差方向に往復移動する往復移動部と、
前記往復移動部の往復移動中において、前記往復移動部の一端を前記所定方向に変位されるため前記第1交差方向に対して傾斜した傾斜ガイドを含むスイング機構と、
ジョイント部と、
を含んで構成され、
前記ジョイント部は、前記コネクティングロッドを前記偏心部及び前記往復移動部の少なくとも一方に、前記所定方向を軸方向として回転可能に連結すると共に、前記所定方向及び前記第1交差方向に交差する第2交差方向を軸方向として回転可能にガイドする作業機。
【請求項3】
前記ジョイント部は、球面滑り軸受構造を有している請求項2に記載の作業機。
【請求項4】
前記ジョイント部は、第1ジョイント部材及び第2ジョイント部材を有しており、
前記球面滑り軸受構造は、
前記第1ジョイント部材に形成された凸球面部と、
前記第2ジョイント部材に形成され、前記凸球面部に摺動可能に構成された凹球面部と、
を含んで構成されている請求項1又は請求項3に記載の作業機。
【請求項5】
前記ジョイント部は、転動部材を有しており、前記転動部材を介して、前記コネクティングロッドを前記偏心部及び前記往復移動部の少なくとも一方に、前記所定方向を軸方向として回転可能に連結している請求項1又は請求項2に記載の作業機。
【請求項6】
前記コネクティングロッドと前記往復移動部とが前記ジョイント部によって連結され、
前記往復移動部には、先端工具が装着される工具装着部が設けられ、
前記往復移動部の往復移動が、スイング機構によってガイドされており、
前記往復移動部の往復移動時に、前記スイング機構によって前記往復移動部が揺動して前記工具装着部が前記所定方向にスイングされる請求項1に記載の作業機。
【請求項7】
前記往復移動部は、前記第1交差方向に延在されており、前記工具装着部が前記往復移動部の長手方向一端部に設けられ、前記コネクティングロッドが前記往復移動部の長手方向他端部に連結され、
前記スイング機構は、
前記往復移動部の前記第1交差方向の移動をガイドする第1ガイド部と、
前記第1交差方向で前記第1ガイド部から離間した位置にあって、前記往復移動部の前記第1交差方向の移動をガイドする第2ガイド部と、
を有しており、
前記第1ガイド部及び前記第2ガイド部による前記往復移動部に対するガイド時には、前記往復移動部の長手方向他端部が前記第2ガイド部によって前記所定方向の一方側又は他方側へ変位すると共に、前記1ガイド部が前記往復移動部を揺動可能に支持する請求項6に記載の作業機。
【請求項8】
前記工具装着部に装着された前記先端工具における前記所定方向の一方側端部には、刃部が設けられており、
前記スイング機構は、正スイングモード又は逆スイングモードに切替可能に構成されており、
前記正スイングモードでは、前記往復移動部の往路移動時に前記工具装着部が前記第1交差方向の一方側且つ前記所定方向の他方側へ移動し、前記往復移動部の復路移動時に前記工具装着部が前記第1交差方向の他方側且つ前記所定方向の一方側へ移動し、
前記逆スイングモードでは、前記往復移動部の往路移動時に前記工具装着部が前記第1交差方向の一方側且つ前記所定方向の一方側へ移動し、前記往復移動部の復路移動時に前記工具装着部が前記第1交差方向の他方側且つ前記所定方向の他方側へ移動する請求項7に記載の作業機。
【請求項9】
前記コネクティングロッドは、前記第1交差方向に延在されており、
前記スイング機構は、前記コネクティングロッドにおける長手方向を軸方向とする回転を規制する規制部材を有している請求項6に記載の作業機。
【請求項10】
前記規制部材が、少なくとも前記コネクティングロッド、前記往復移動部、前記工具装着部の何れかに設けられている請求項9に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
作業機においては、所定の部品を往復動させることで作業を行うものがあり、そのための様々な往復動変換機構がある。下記特許文献1に記載の電動工具(作業機)では、スコッチ―ヨーク式の運動変換機構によって、モータの回転運動が直線運動に変換されて、プランジャが前後方向に往復動する。具体的には、上下方向を軸としてコネクティングピースが偏心回転し、その動作をプランジャと一体化されたピンガイドが受けることでプランジャに前後方向に動力が伝達されるように構成される。下記特許文献2に記載の電動工具(作業機)では、いわゆるコンロッド式の運動変換機構によって、モータの回転運動が直線運動に変換されて、ピストンが前後方向に往復移動する。具体的には、上下方向を軸方向とするクランク軸の下端部が、ギヤに一体回転可能に設けられており、クランク軸は、ギヤの軸線に対して偏心した位置に配置されている。また、前後方向に延在されたコネクティングロッドの後端部が、クランク軸に回転可能に連結され、コネクティングロッドの前端部が、上下方向を軸方向としてピストンに回転可能に連結されている。すなわち、運動変換機構が、所謂クランク機構となっている。これにより、モータの駆動力によって、ギヤが回転すると、ピストンが前後方向に往復移動する。
【先行技術文献】
【特許文献】
【0003】
特許第7151706号
特開2007-237303号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上記特許文献2の運動変換機構を用いた電動工具では、以下に示す点において改善の余地がある。すなわち、例えば、電動工具の作動中に生じる負荷によって、コネクティングロッドとクランク軸との連結部に、左右方向を軸方向とする回転力が発生した場合には、この回転力によって当該連結部が破損や変形する虞がある。仮に、当該連結部が破損等すると、作業の継続が困難となり、作業性が低下する可能性がある。また、例えば、運動変換機構では、回転運動を直線運動に変換して、ピストンを前後方向に往復移動させるため、作業機の作動時に生じる振動が、作業者等に伝達されて、作業性が低下する可能性がある。
【0005】
本発明は、上記事実を考慮して、作業性の低下を抑制できる作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1又はそれ以上の実施形態は、モータと、前記モータの駆動によって所定方向に延在された軸線を中心に偏心回転する偏心部と、前記偏心部の回転運動を往復運動に変換する変換機構と、を備え、前記変換機構は、前記偏心部に連結されたコネクティングロッドと、前記コネクティングロッドに連結され、前記所定方向に交差する第1交差方向に往復移動する往復移動部と、前記往復移動部の往復移動中において、前記往復移動部の一端を前記所定方向に変位されるため前記第1交差方向に対して傾斜したガイド面を含むスイング機構と、ジョイント部と、を含んで構成され、前記ジョイント部は、前記コネクティングロッドを前記偏心部及び前記往復移動部の少なくとも一方に、前記所定方向を軸方向として回転可能に連結すると共に、前記所定方向及び前記第1交差方向に交差する第2交差方向を軸方向として回転可能にガイドする球面滑り軸受構造を有する作業機である。
【0007】
本発明の1又はそれ以上の実施形態は、モータと、前記モータの駆動によって所定方向に延在された軸線を中心に偏心回転する偏心部と、前記偏心部の回転運動を往復運動に変換する変換機構と、を備え、前記変換機構は、前記偏心部に連結されたコネクティングロッドと、前記コネクティングロッドに連結され、前記所定方向に交差する第1交差方向に延在するとともに、前記第1交差方向に往復移動する往復移動部と、前記往復移動部の往復移動中において、前記往復移動部の一端を前記所定方向に変位されるため前記第1交差方向に対して傾斜した傾斜ガイドを含むスイング機構と、ジョイント部と、を含んで構成され、前記ジョイント部は、前記コネクティングロッドを前記偏心部及び前記往復移動部の少なくとも一方に、前記所定方向を軸方向として回転可能に連結すると共に、前記所定方向及び前記第1交差方向に交差する第2交差方向を軸方向として回転可能にガイドする作業機である。
【0008】
本発明の1又はそれ以上の実施形態は、前記ジョイント部は、球面滑り軸受構造を有している作業機である。
【0009】
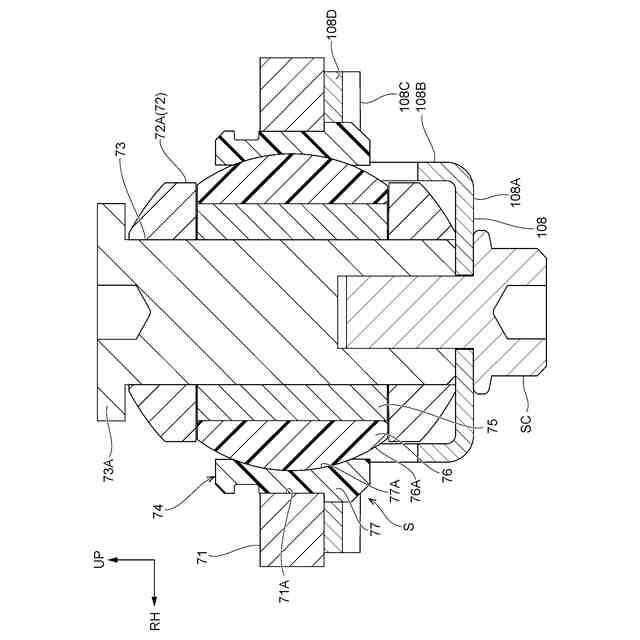
本発明の1又はそれ以上の実施形態は、前記ジョイント部は、第1ジョイント部材及び第2ジョイント部材を有しており、前記球面滑り軸受構造は、前記第1ジョイント部材に形成された凸球面部と、前記第2ジョイント部材に形成され、前記凸球面部に摺動可能に構成された凹球面部と、を含んで構成されている作業機である。
【0010】
本発明の1又はそれ以上の実施形態は、前記ジョイント部は、転動部材を有しており、前記転動部材を介して、前記コネクティングロッドを前記偏心部及び前記往復移動部の少なくとも一方に、前記所定方向を軸方向として回転可能に連結している作業機である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
1か月前
OMC株式会社
ロボット
3か月前
株式会社ジャノメ
ロボット
21日前
株式会社クレスコ
補助吸着具
3か月前
株式会社不二越
ロボット
2か月前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
搬送装置
25日前
株式会社エビス
腰ベルト用連結具
3か月前
住友重機械工業株式会社
教示装置
18日前
個人
ペグハンマおよびペグハンマ用部品
25日前
川崎重工業株式会社
ロボット
19日前
東京都公立大学法人
対象物把持装置
2か月前
工機ホールディングス株式会社
作業機
18日前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
18日前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
庄内機械株式会社
釘打装置
2か月前
住友重機械工業株式会社
支援装置
25日前
株式会社アイエイアイ
グリッパー
2か月前
住友重機械工業株式会社
支援装置
25日前
住友重機械工業株式会社
ロボット
2か月前
川崎重工業株式会社
制動システム
2か月前
株式会社イノウ
給油口キャップ用開閉具
2か月前
ホシデン株式会社
分解用治具
25日前
株式会社マキタ
電気機器
19日前
アピュアン株式会社
衝撃工具
27日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ